
















CS机器人本机TCPIP测试软件与虚拟机建立连接
1. 简介
本文将介绍,如何使用本机 TCPIP 测试软件与 CS 虚拟机建立连接。
本文示例的 TCPIP 测试软件:SocketTool
机器人软件版本:V 2.12.0
用户手册下载地址:
https://www.elibot.com/service/technical?kw=&type1=&type2=18&type3=&type4=&type5=&wd=1&tp=1
脚本手册下载地址:
https://www.elibot.com/service/technical?kw=&type1=&type2=11&type3=&type4=&type5=&wd=1&tp=1
2. 操作流程
2.1. 找到在本机运行的虚拟机软件的IP
1.本机操作:Win键 + R 输入 cmd ,打开 cmd 窗口。

2. 本机操作:cmd 窗口输入 ipconfig ,找到虚拟机软件的 IP:192.168.15.123 。

2.2. 找到在虚拟机运行的系统的IP
1.虚拟机操作:右击鼠标,点击在终端打开,打开在虚拟机中执行的系统的终端。

2. 虚拟机操作:在终端输入 ifconfig ,找到 IP :192.168.15.128 。

2.3. 本机做主站,SocketTool操作
1.本机做主站,机器人做从站。在 SocketTool 软件里,创建客户端,输入在 2.2 里获取的IP:192.168.15.128 ,端口号参考用户手册里的二次开发端口。

【原尺寸1052*792】

【修改尺寸为880*661】
2. 以 30001 端口为例,连接成功后,即可收机器人的反馈。本机做主站,机器人做从站,机器人不需要做任何操作。

2.4. 本机做从站,机器人操作与SocketTool操作
1. 参考 CS脚本手册 ,写一个简易的通讯脚本,IP 输入目录 2.1 里获取的 IP:192.168.15.123 。
2.
ret = socket_open("192.168.15.123",6000)
while ret == False:
textmsg(ret)
ret = socket_open("192.168.15.123",6000)
sleep(0.5)
textmsg(ret)
socket_send_string("hello")

3. 本机 SocketTool ,创建一个服务器,端口6000。
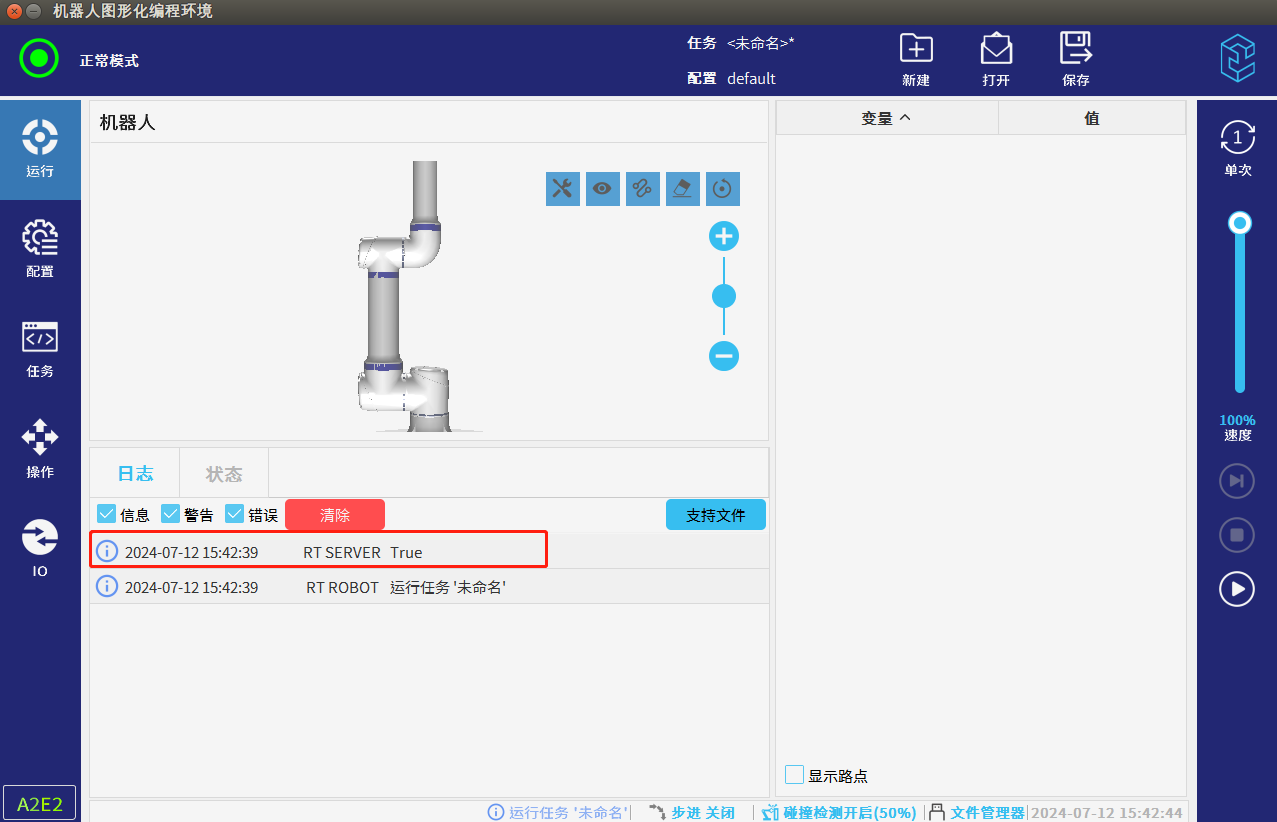
4. 机器人运行程序,连接成功,机器人会在运行窗口,打印 True 。
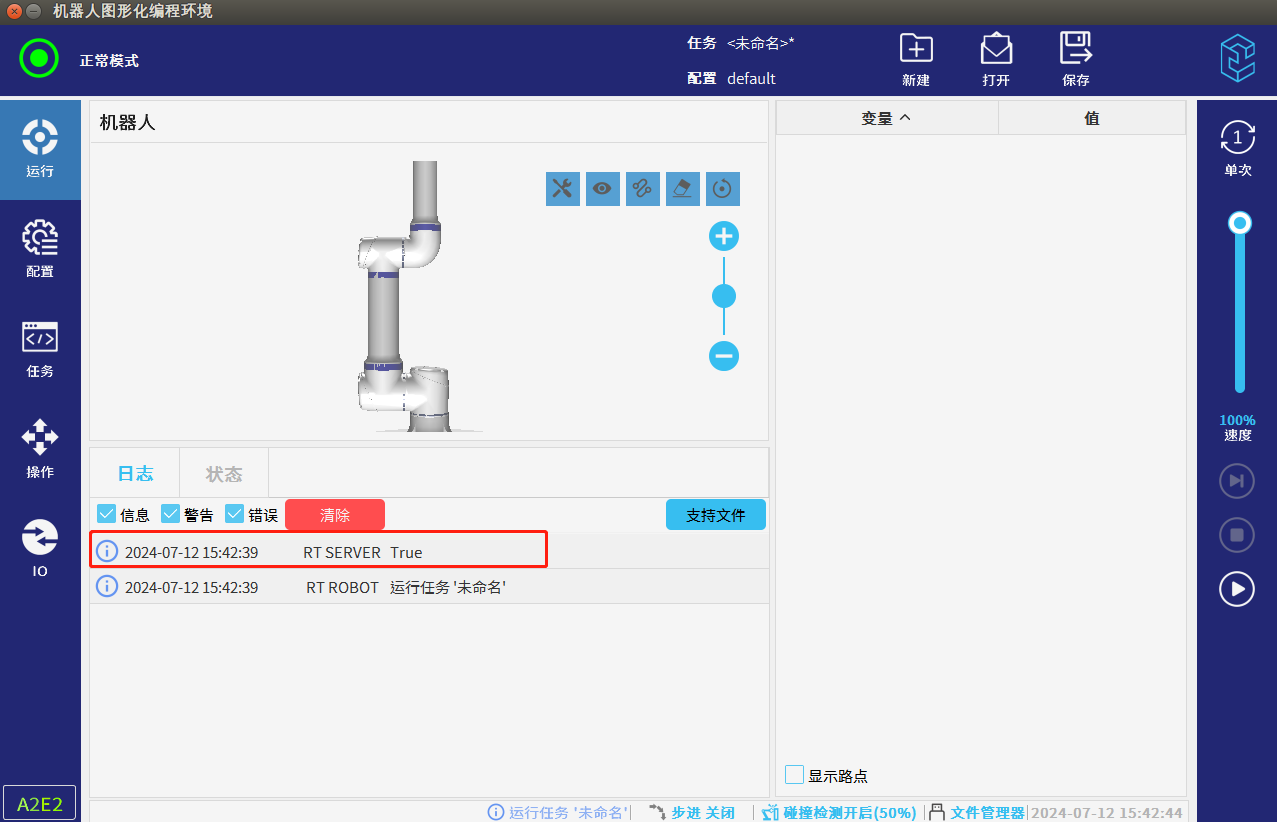
5. 本机这边,SocketTool 会收到机器人发过来的字符串。

3. 常见问题解答
3.1 虚拟机内的机器人软件,不需要设置 IP 地址。与本机通讯,使用 2.2 目录获取的 IP,可以当作是机器人的 IP 。

2. 目录 2.1 里获取的 IP 是虚拟机软件,虚拟网口的 IP ,可以当作是本机的 IP 。



























