
















CS机器人TCPIP通讯
1. 简介
本文将介绍如何用SocketTool通讯助手跟机器人进行通讯测试。
2. 操作流程
2.1 点击右上角艾利特logo,点击设置


2.2 点击红箭头所指处的网络。设置红框处的FB2的IP地址,需要与连接设备同网段

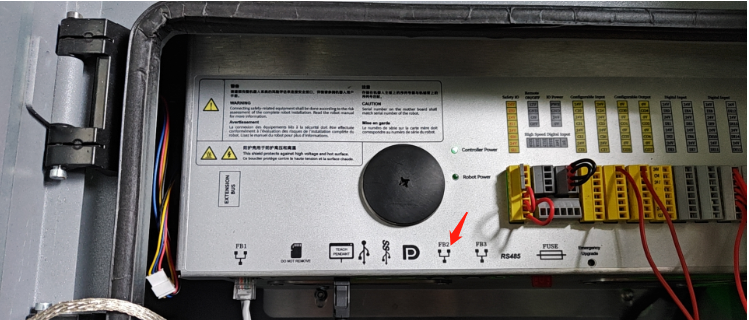
2.3 将网线连至控制柜的FB2网口(profinet Ethernet通讯走FB1网口,modbus/tcp通讯机器人做主站走FB2网口,做从站走FB1)
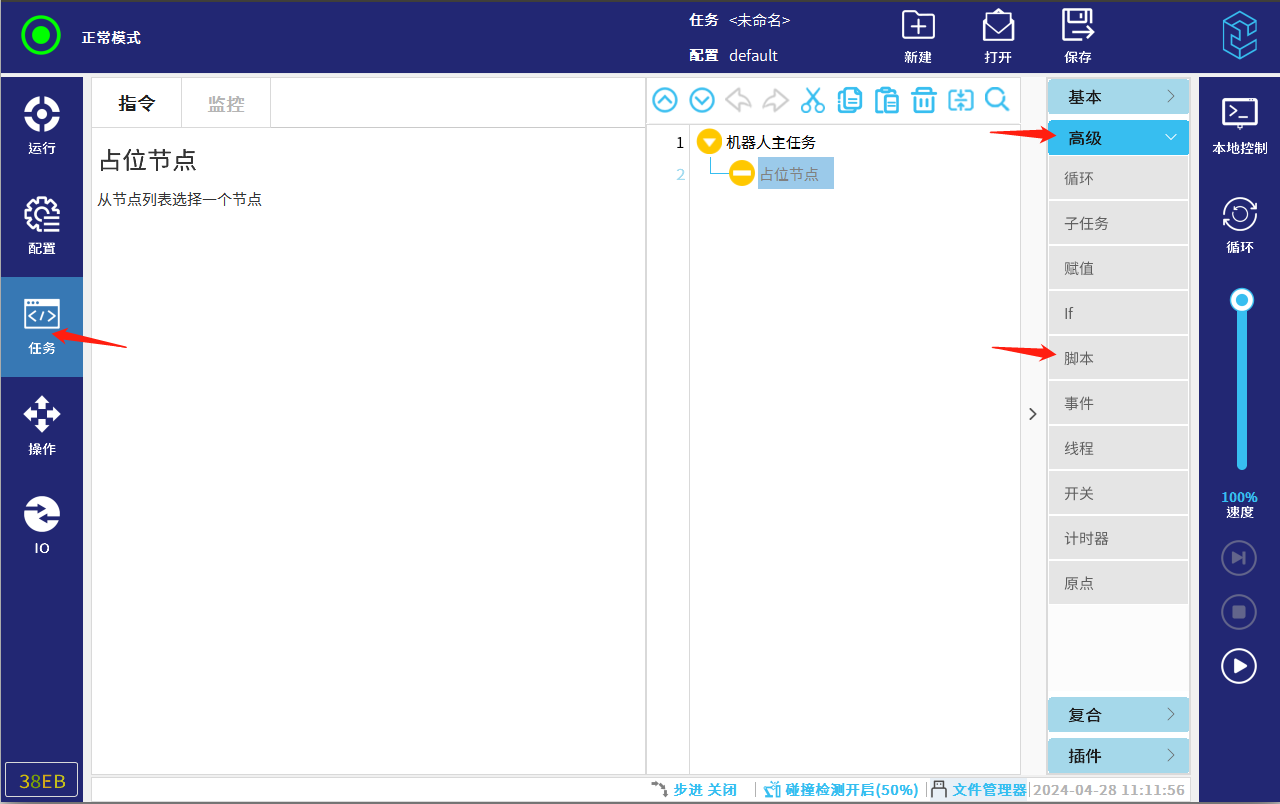
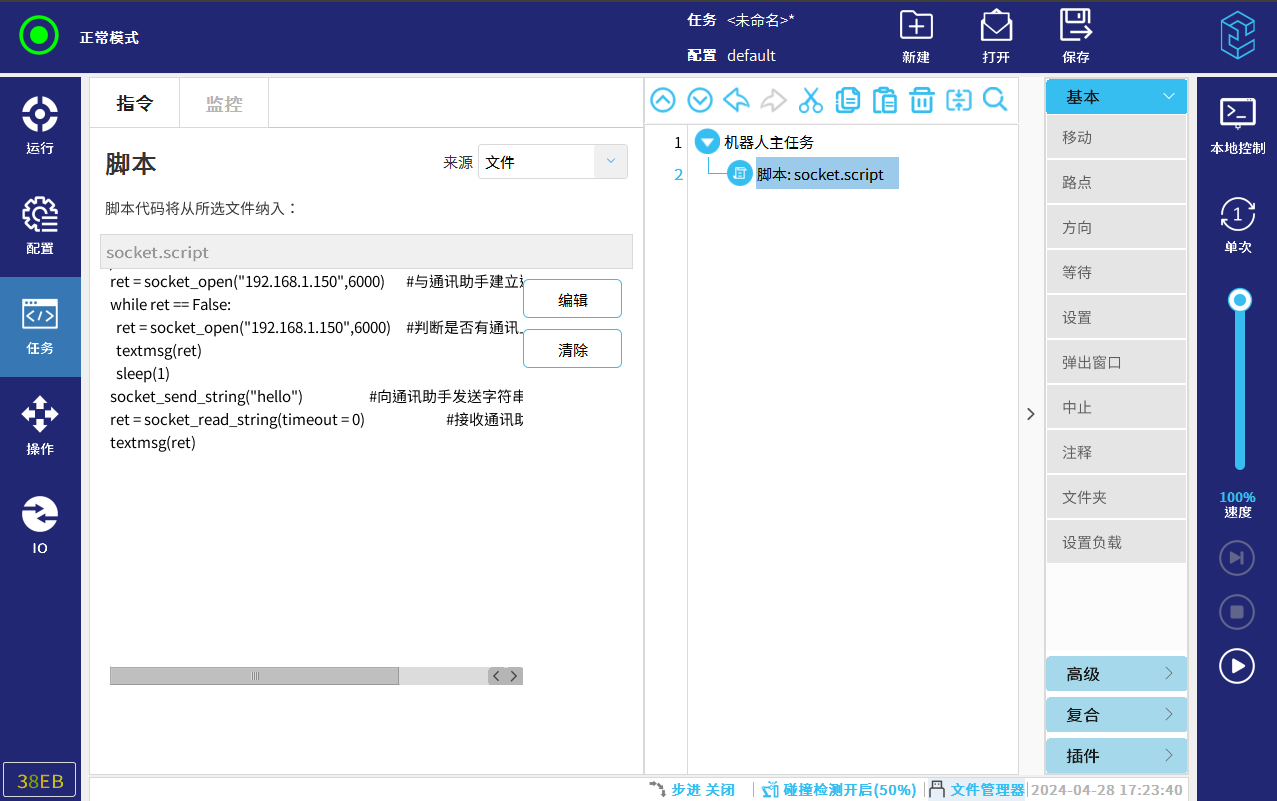
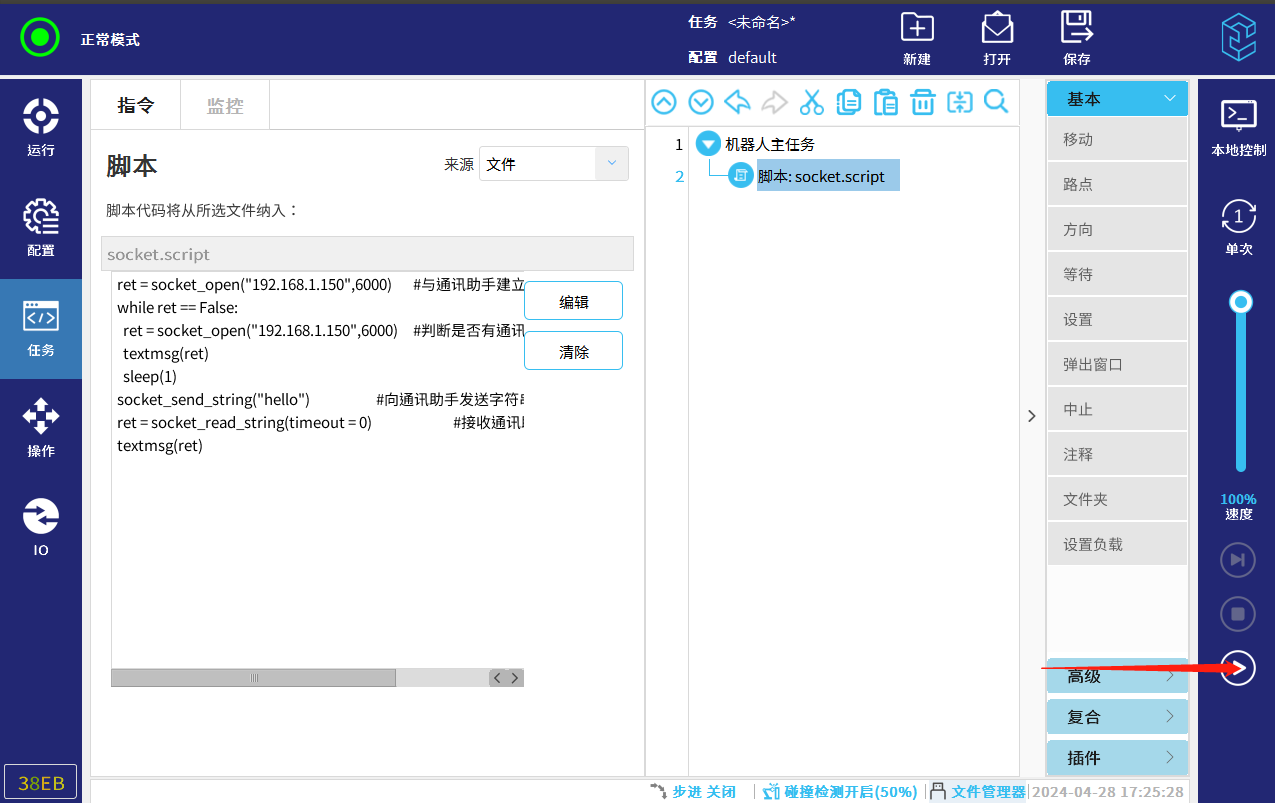
2.4 点击任务,在高级目录下点击脚本
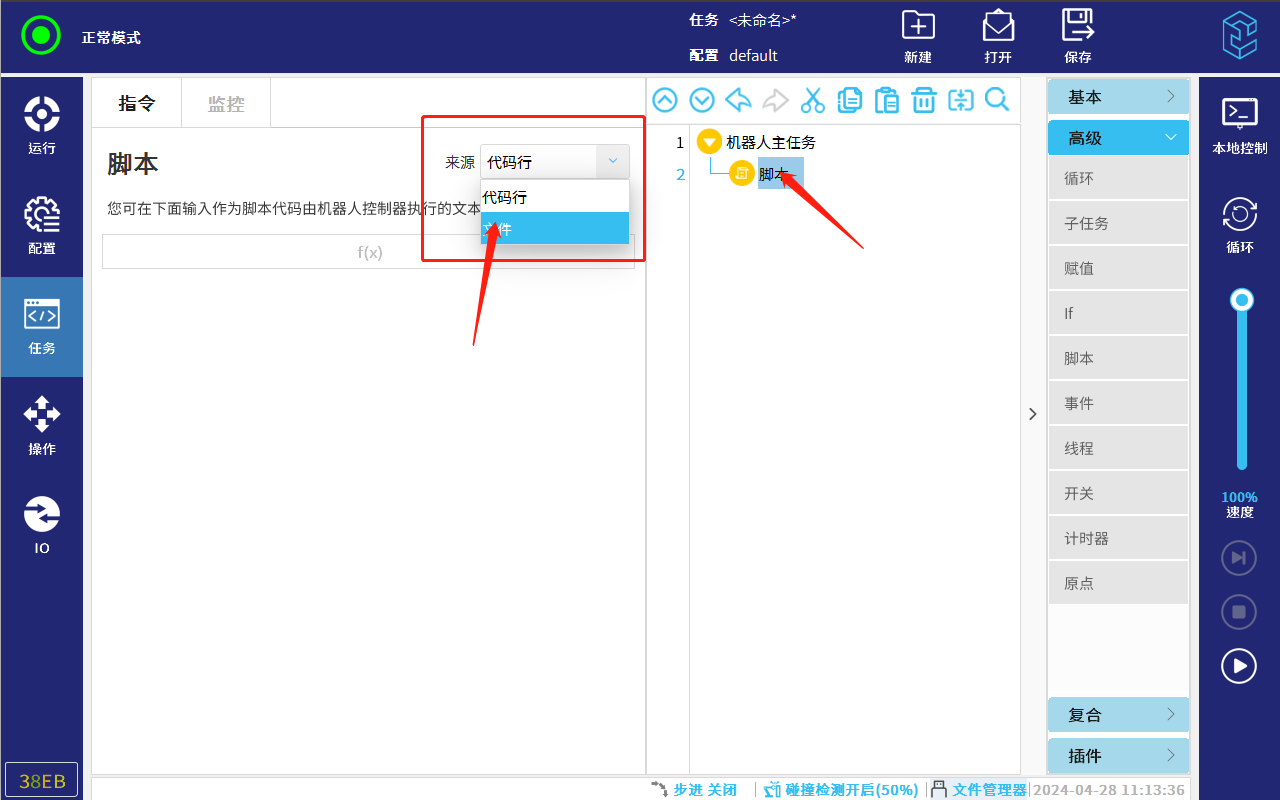
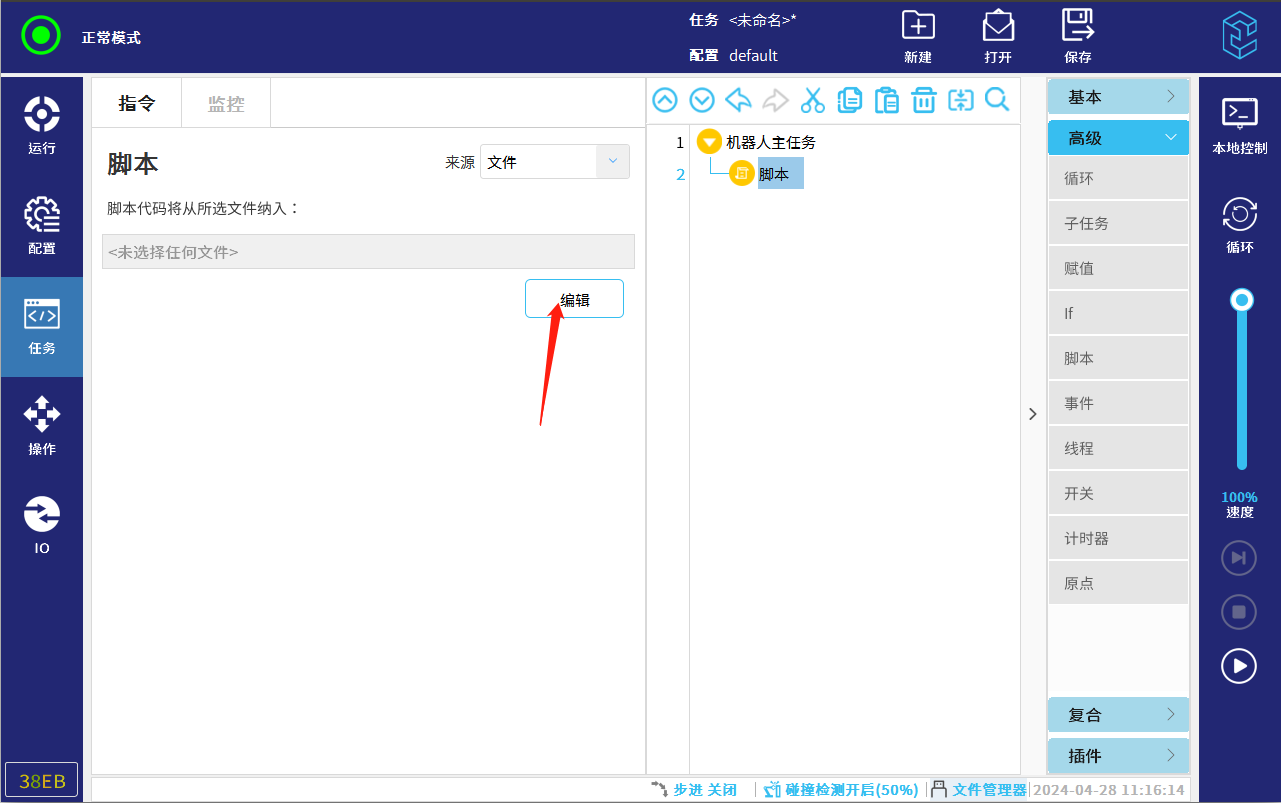
2.5 点击任务树下的脚本行,点击来源选项,选择文件后,点击编辑
2.6. 编写通讯脚本。详情参考CS脚本手册-通讯目录下的socket,可在艾利特官网下载。技术资料-艾利特机器人
脚本需要按照python的语法格式进行编辑
ret = socket_open("192.168.1.150",6000) 与通讯助手建立连接,ip地址填所连接设备的ip
while ret == False: 判断有没有通讯上。没有通讯上,每间隔1秒建立连接一次
ret=socket_open("192.168.1.150",6000)
textmsg(ret)
sleep(1)
socket_send_string("hello") 向通讯助手发送字符串
ret = socket_read_string(timeout = 0) 接收通讯助手发过来的字符串
textmsg(ret) 打印接收到的字符串,会显示在运行界面的日志栏里
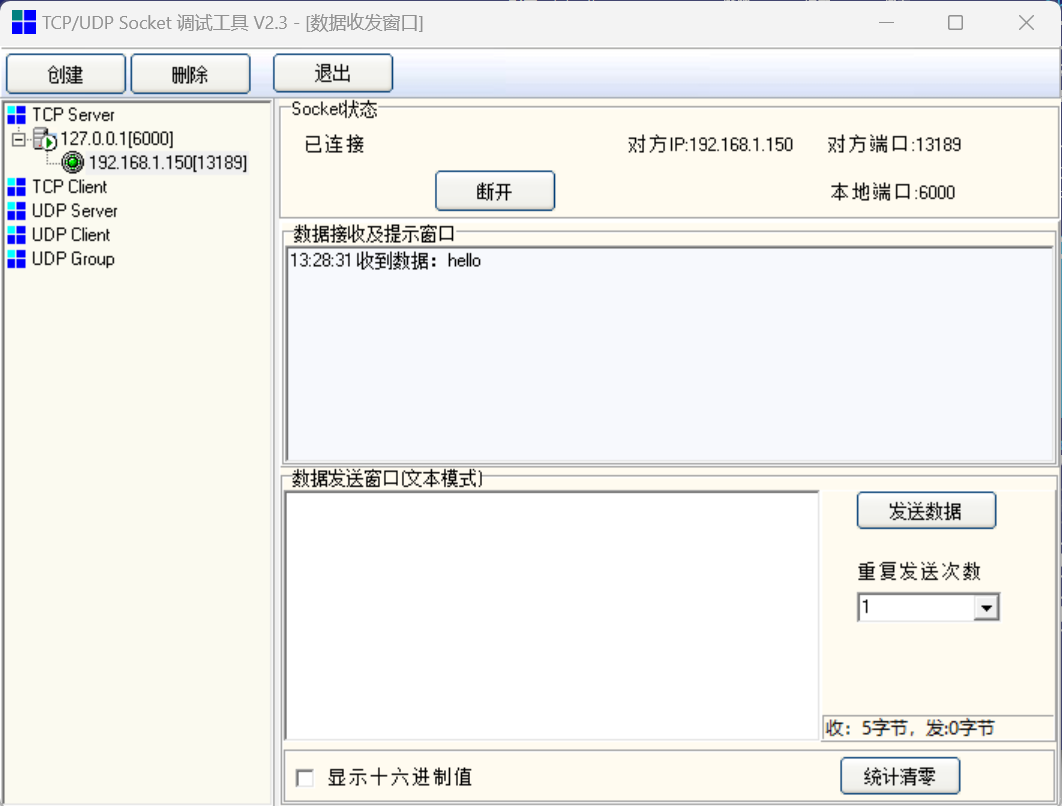
2.7 打开通讯助手,创建服务器

2.8 设置端口号

2.9 在任务界面,点击运行
2.10 在机器人运行脚本,通讯成功后,通讯助手就能收到机器人发送的字符串
2.11 在发送窗口输入要发送的内容,点击发送数据
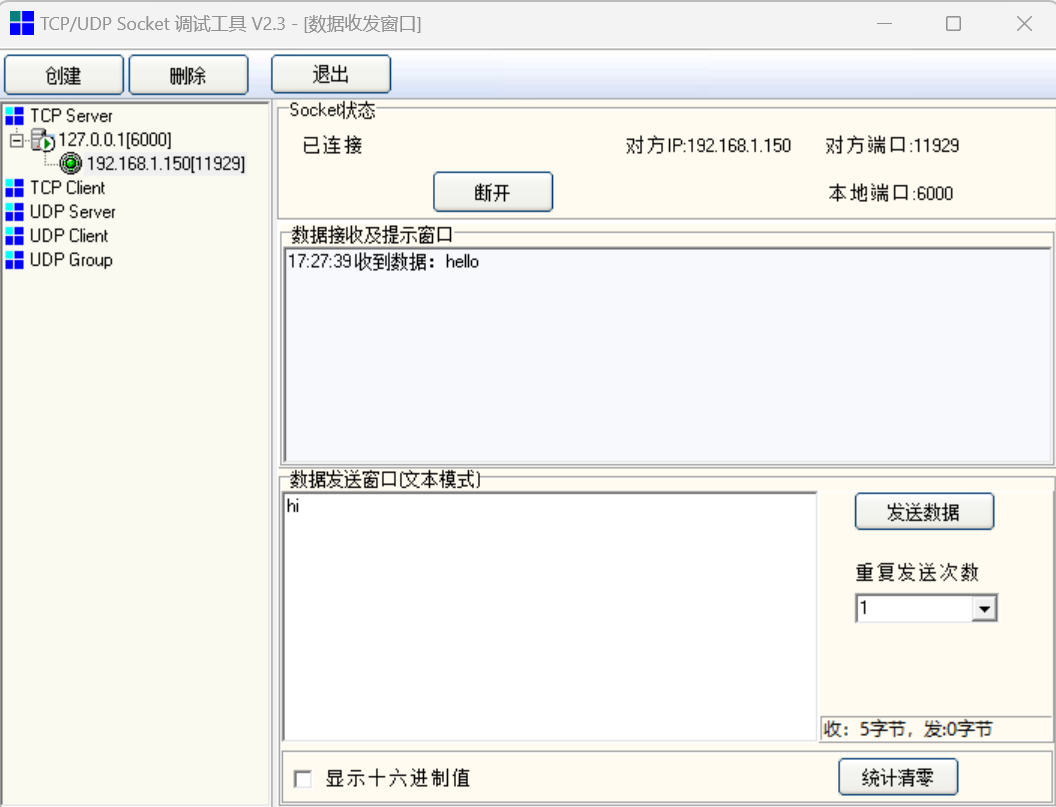
2.12 接收到的值,通过脚本命令行,会打印在运行界面的日志栏里

3. 常见问题解答
3.1 不同网口,走的通讯类型不一样。profinet Ethernet通讯走FB1网口,modbus tcp通讯走FB2网口
如果有通讯不上的情况,关掉电脑防火墙,检查网口是否有正确连接
3.2 如果有通讯不上的情况,关掉电脑防火墙,检查网口是否有正确连接


























