




















艾利特轮式人形机器人
一脑多形 元启万物
Centaur-G1
Centaur-G1 是艾利特机器人深度融合“一脑多形”战略矩阵打造的全新轮式人形机器人旗舰构型。不仅硬件形态创新,更以元启Primo工业级具身智能大模型平台为智能引擎。原生融合多模态感知、世界模型、强化学习与端到端决策。通过覆盖“感知层、决策规划层、空间理解层”的全链路技术栈,实现了从底层一体化控制硬件到上层强人工智能决策的端到端技术闭环。
-
5KG


单臂最大负载
-
±0.1mm

双臂重复定位精度
-
20个

全身自由度
-
7个

单臂自由度
-
±10mm

移动底盘定位精度
-
48V 40Ah

电池容量
-
2200mm

工作半径
-
1500mm

操作高度



元启Primo具身大模型深度赋能
-
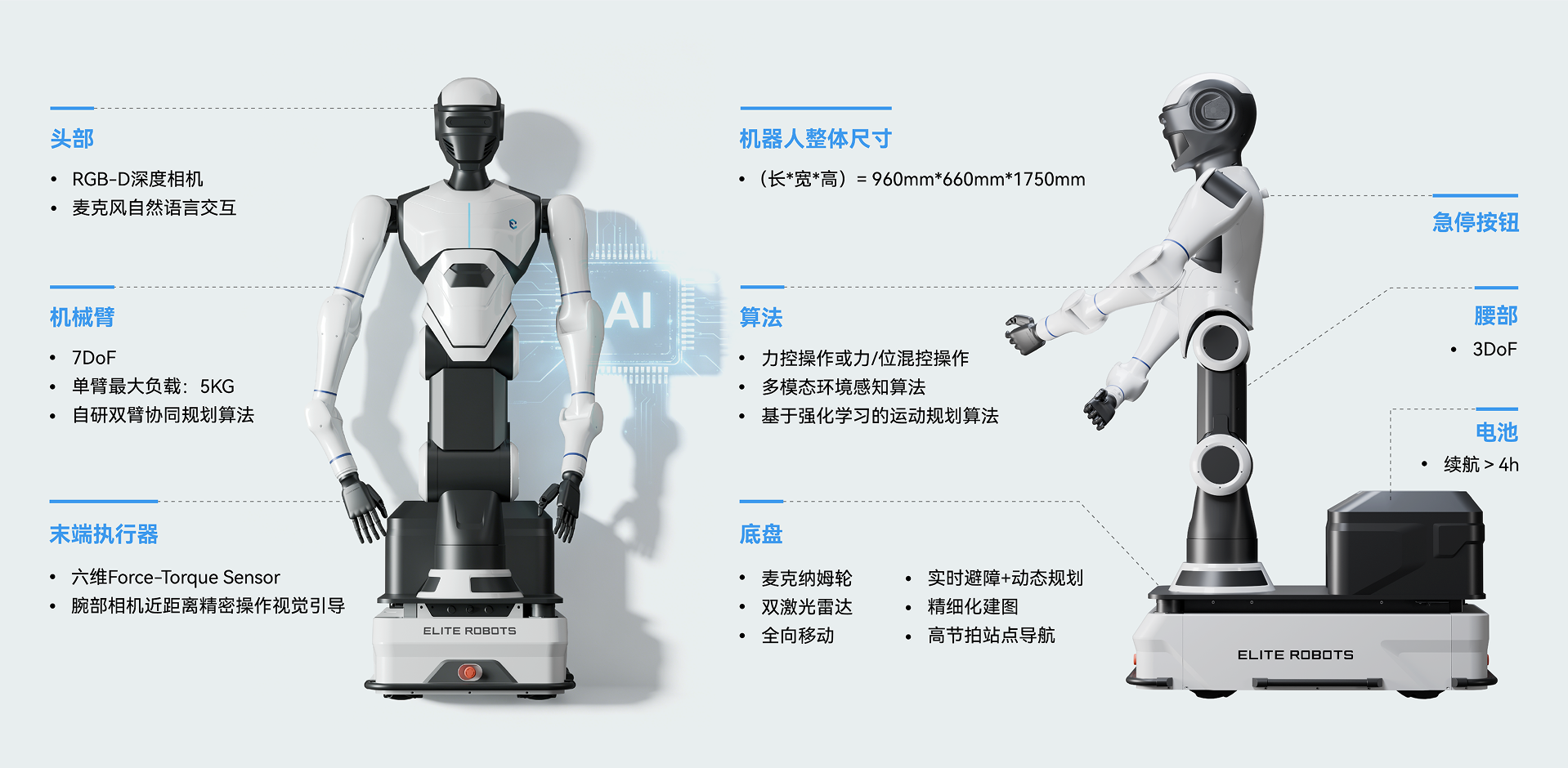
多模态全域智能感知
突破单一传感器局限,构建多源异构感知融合体系
激光雷达: 实时定位与导航,构建高精度环境地图
头部RGB-D相机: 全局环境识别+目标物体定位
腕部双目微距相机: 近距离精密操作视觉引导
末端六维力传感器: 多接触/紧密配合任务的力觉采集与柔顺控制
多模态数据对齐:赋予大模型底座超越人类的物理世界理解力

-
具身智能操作大模型
将高精度力控反馈深度融入VLA架构,实现“手-眼-力”的具身协同
模型具备强大的常识推理与多任务泛化能力,能直接输出端到端的执行策略
跨域任务泛化时,支持基于少样本的人类示范模型快速适配,实现操作技能的高效自我进化与快速部署

-
具身空间智能大模型
依托大模型的空间语义理解能力,轮式双臂人形机器人可对大尺度复杂工作环境进行自主探索与语义建图,更能理解人类自然语言指令
面对长程任务,模型可自动进行逻辑拆解并驱动底层运动规划,确保在动态非结构化环境中应对自如


轮式人形机器人关键要点

艾利特轮式双臂人形机器人典型应用场景
-


AI Infra
AI服务器巡检: 机器人自主穿服务器机房,实时检测设备状态,替代人工完成高频次、标准化的智慧巡检任务
AI Infra
AI服务器巡检: 机器人自主穿服务器机房,实时检测设备状态,替代人工完成高频次、标准化的智慧巡检任务
-

智能制造
手机包装分拣:在手机工厂的物流环节中,机器人自主拆包、分拣、上 料,实现从来料拆包到产线配送的无缝衔接。
智能制造
手机包装分拣:在手机工厂的物流环节中,机器人自主拆包、分拣、上 料,实现从来料拆包到产线配送的无缝衔接。
-

科研教育
科研实验室:在实验室中,机器人可手持移液枪完成精准加样操作,解放科研人员双手,提升实验重复性与安全性。
科研教育
科研实验室:在实验室中,机器人可手持移液枪完成精准加样操作,解放科研人员双手,提升实验重复性与安全性。
-

医疗健康
助老康养:面向康养场景,机器人辅助长者起身、递送物品并进行健康 监测,成为贴心的智能照护助手
医疗健康
助老康养:面向康养场景,机器人辅助长者起身、递送物品并进行健康 监测,成为贴心的智能照护助手
-

商业服务
无人商超:在无人商超内,机器人可自主导航、识别商品并协助理货、 拣选,为智慧零售提供移动服务新体验。
商业服务
无人商超:在无人商超内,机器人可自主导航、识别商品并协助理货、 拣选,为智慧零售提供移动服务新体验。
-

家庭服务
智能陪伴:在家中,机器人可完成地面清洁、物品整理、老人陪伴等任 务,让家庭生活更轻松、更智能。
家庭服务
智能陪伴:在家中,机器人可完成地面清洁、物品整理、老人陪伴等任 务,让家庭生活更轻松、更智能。
 更多场景,敬请期待
更多场景,敬请期待

开发支持
-


Elite Control Interface
提供全身FK/IK算法,
支持笛卡尔空间运动学控制 -

Elite ROS
支持ROS2
-

Elite IsaacSim 仿真环境
提供与实机一致的IsaacSim仿真环境,方便运动控制算法测试,降低sim2real难度配套IsaacLab并行深度强化学习训练环境及训练样例
















