
















CS机器人IO高级配置插件
1. 简介
目前CS的IO状态输出与输入仅包括任务运行时状态的关联与控制,用户如果需要跟踪一些报警信息等状态,目前已有的功能无法实现,不够便利。为了满足用户一些相对定制化的需求,并且尽量少的改动已有功能,考虑开发一款独立的IO配置插件,用于满足更加丰富的IO扩展配置。
2. 操作流程
2.1插件安装

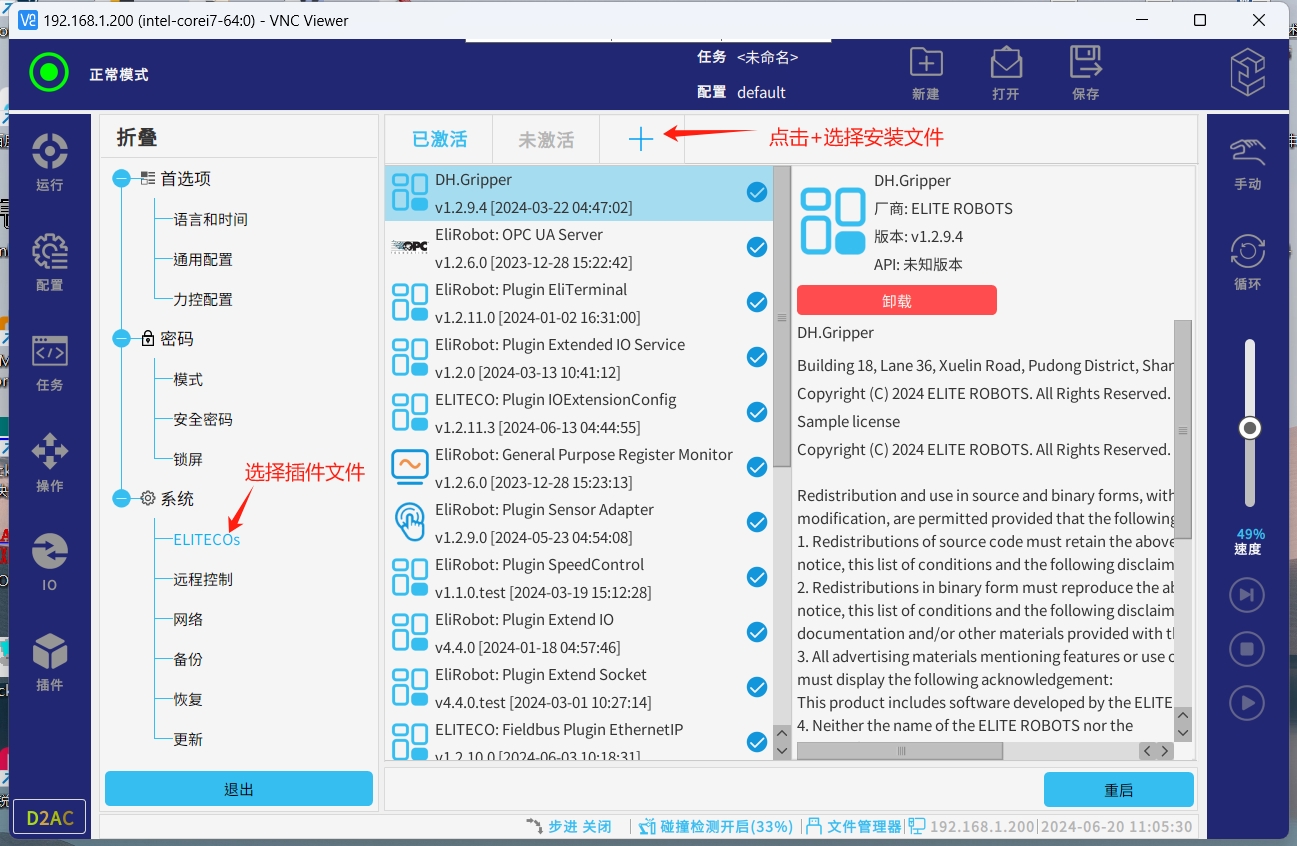
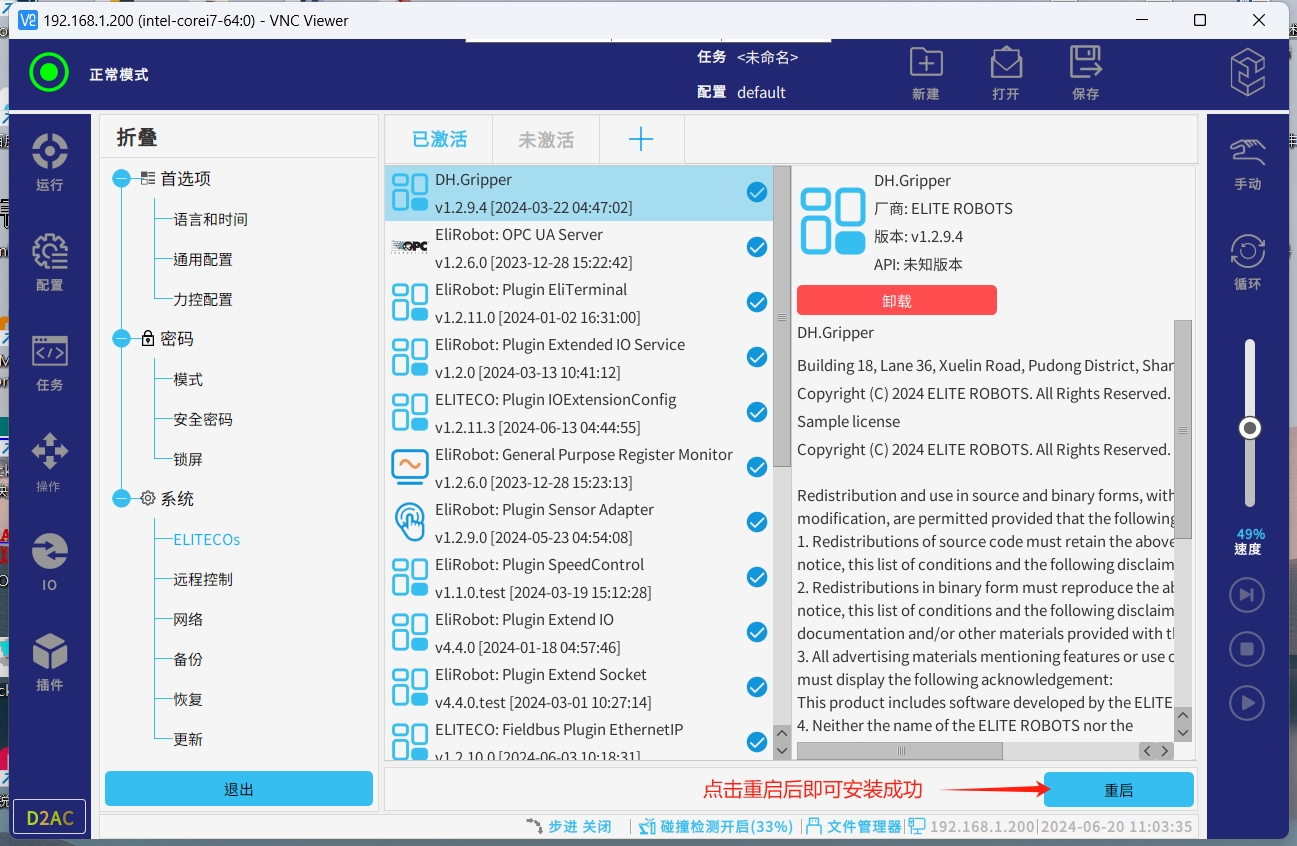
● 将获取到的插件文件放置到U盘内,并将U盘接入机器人USB接口,按照下方操作安装IOExtensionConfig插件。

2.2插件使用
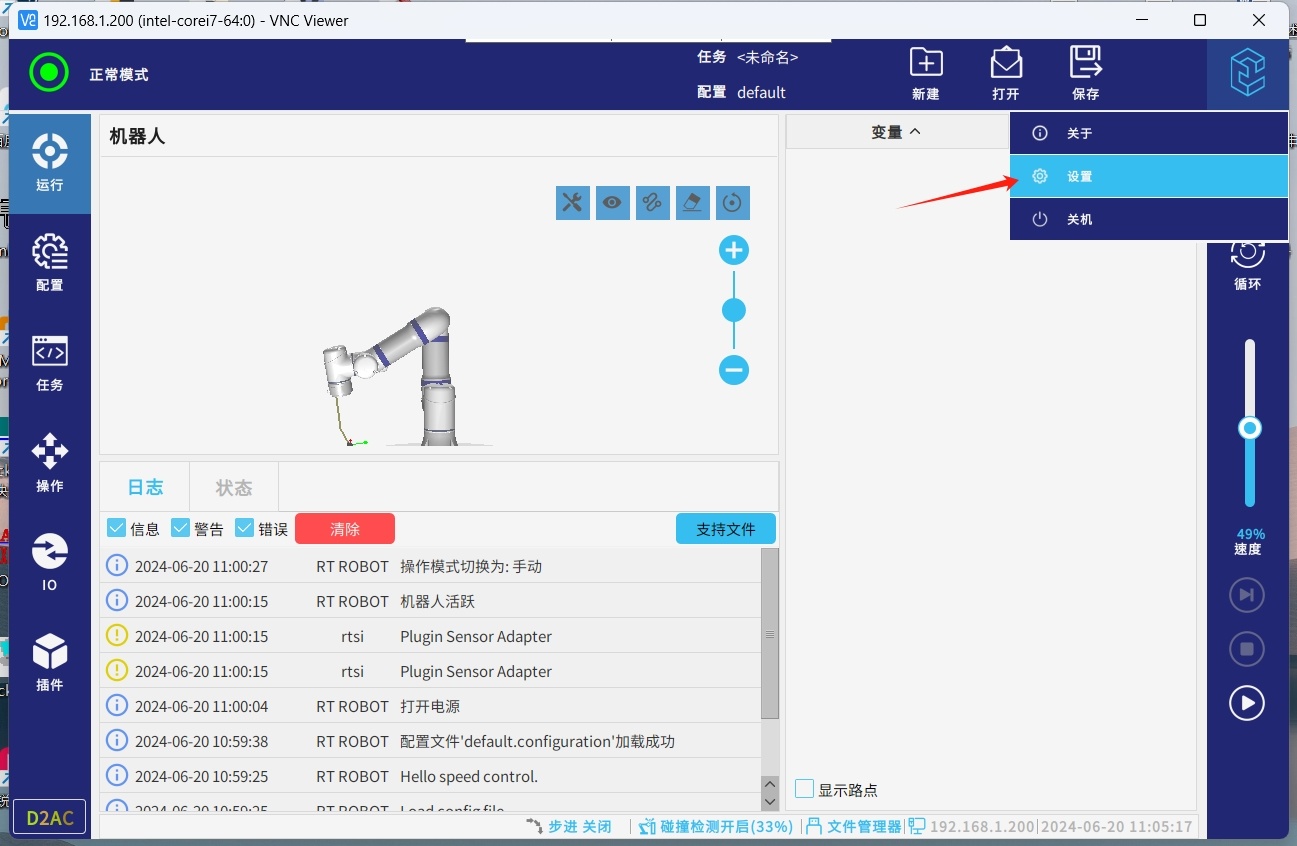
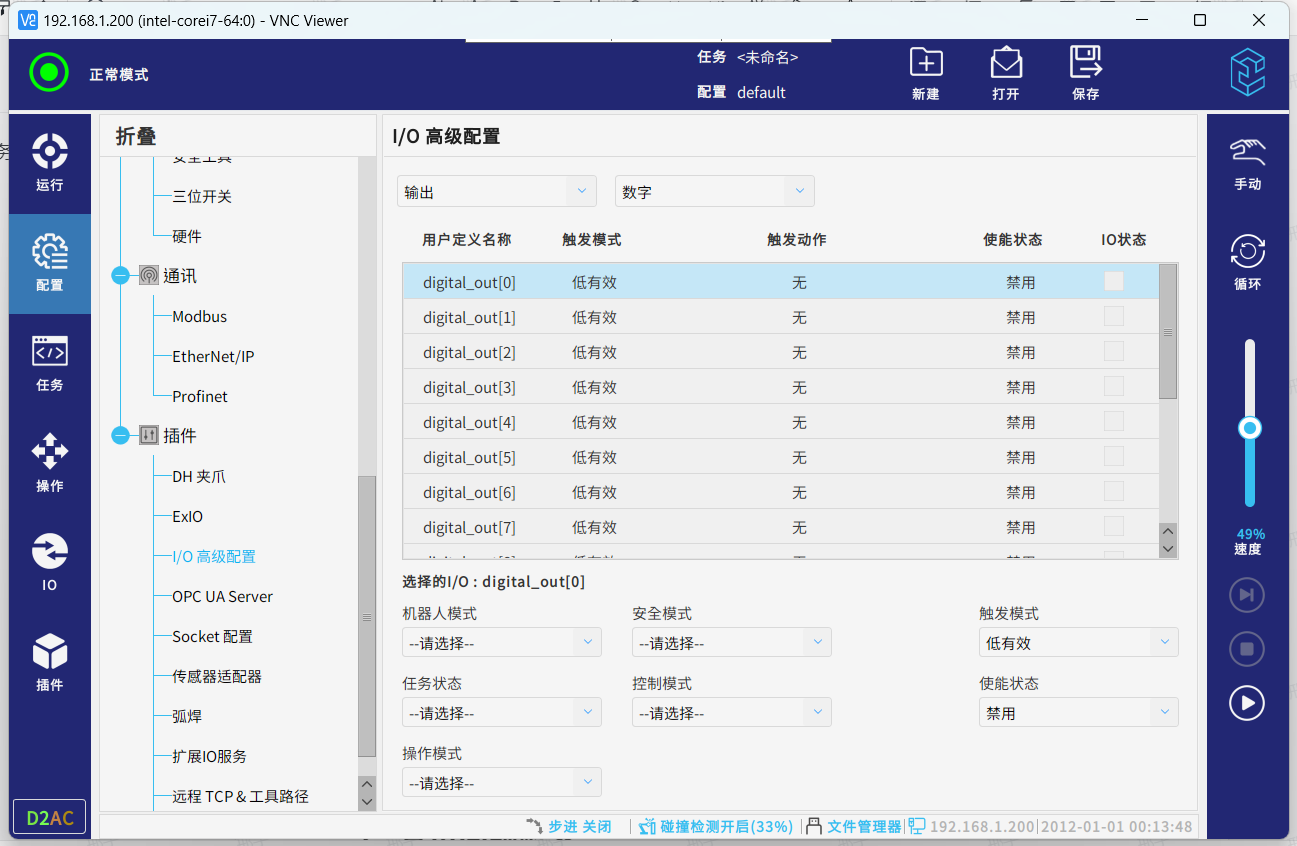
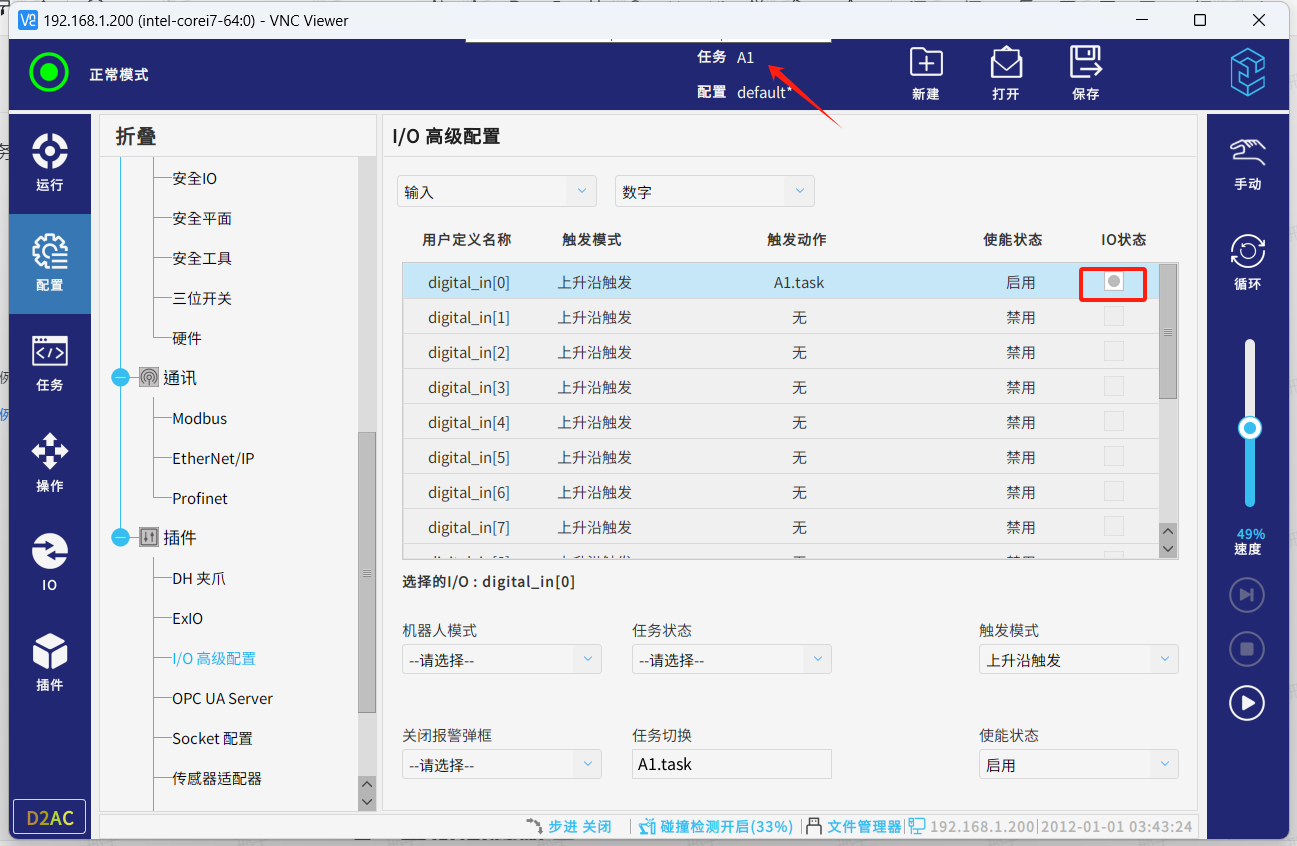
安装成功后进入配置,插件,IO高级配置,就可配置对应的IO来触发对应的功能或者绑定对应的IO来接收机器人的状态变化。
功能介绍:
关于IO输出状态绑定:
● 支持数字IO、工具IO、可配置IO、MODBUS、布尔寄存器(修改名称使用)。
● 支持绑定机器人模式(上电状态,电源关闭,抱闸以释放等)
● 支持机器人安全模式绑定(正常模式,缩减模式,机器人紧急停止等)
● 支持任务运行状态绑定(任务运行中、任务已停止、任务已暂停等)。
● 支持控制模式状态绑定(远程模式、本地模式、未配置等)。
● 支持操作模式状态绑定(本地模式、远程模式、未配置等)。
● 支持绑定状态高低电平设置(即可以设置有效时为高或者有效时为低)。
● 支持该IO配置项的(使能状态)也即启用与禁用。
关于IO输入状态绑定:
● 支持数字IO、工具IO、可配置IO、MODBUS、布尔寄存器(修改名称使用)。
● 支持机器人上电、机器人下电、释放抱闸、解除保护性停止功能等。
● 支持机器人关闭保护性停止弹出框。
● 支持任务状态控制(启动任务、停止任务、暂停任务等)。
● 支持触发模式设置(即上升沿触发、下降沿触发、高电平状态触发、低电平状态触发等)。
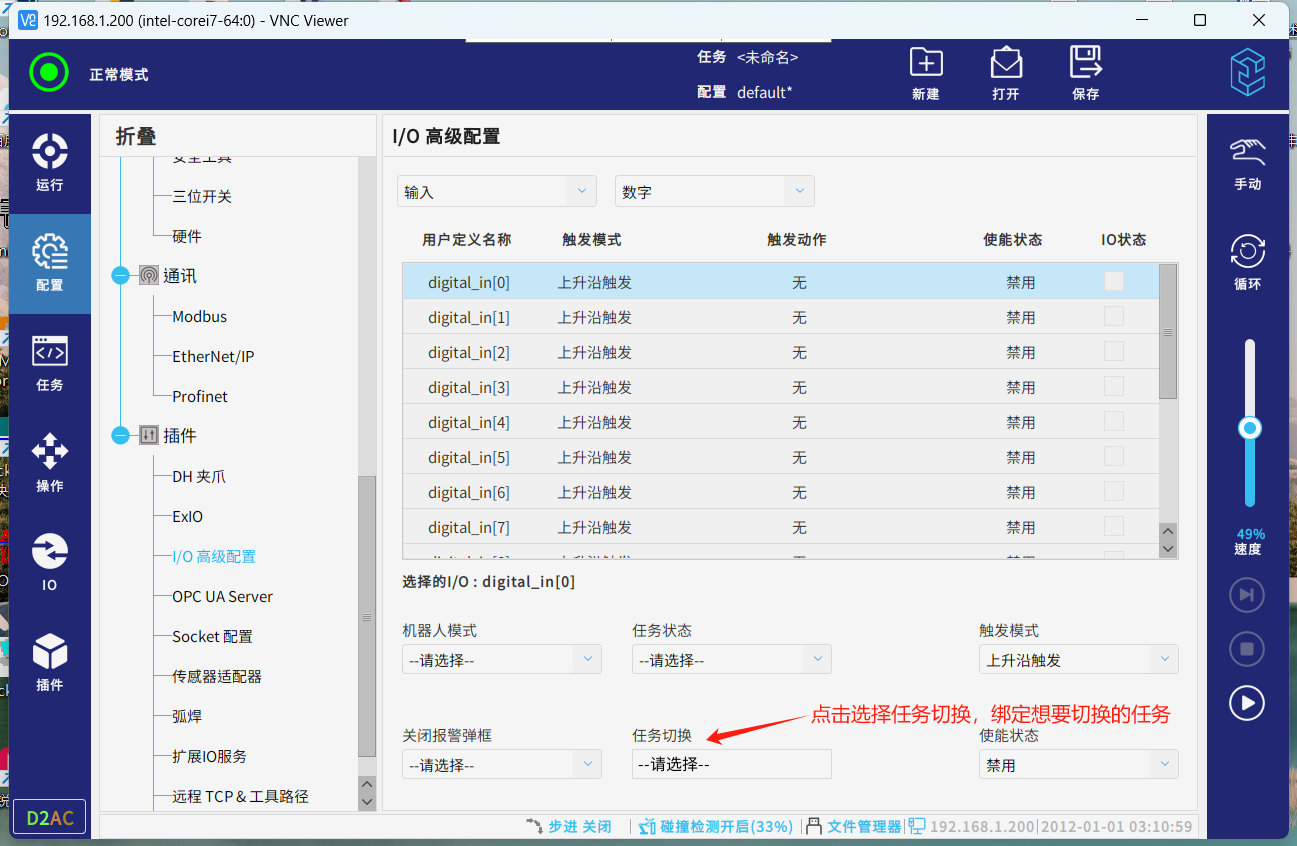
● 支持任务切换功能,绑定对应IO后,触发IO自动切换对应的任务程序和任务程序所处的配置。(被动切换任务所对应的配置)
● 支持该IO配置项(使能状态)也即启用与禁用与仅远程模式生效用于保证本地控制的安全性。
3. 示例
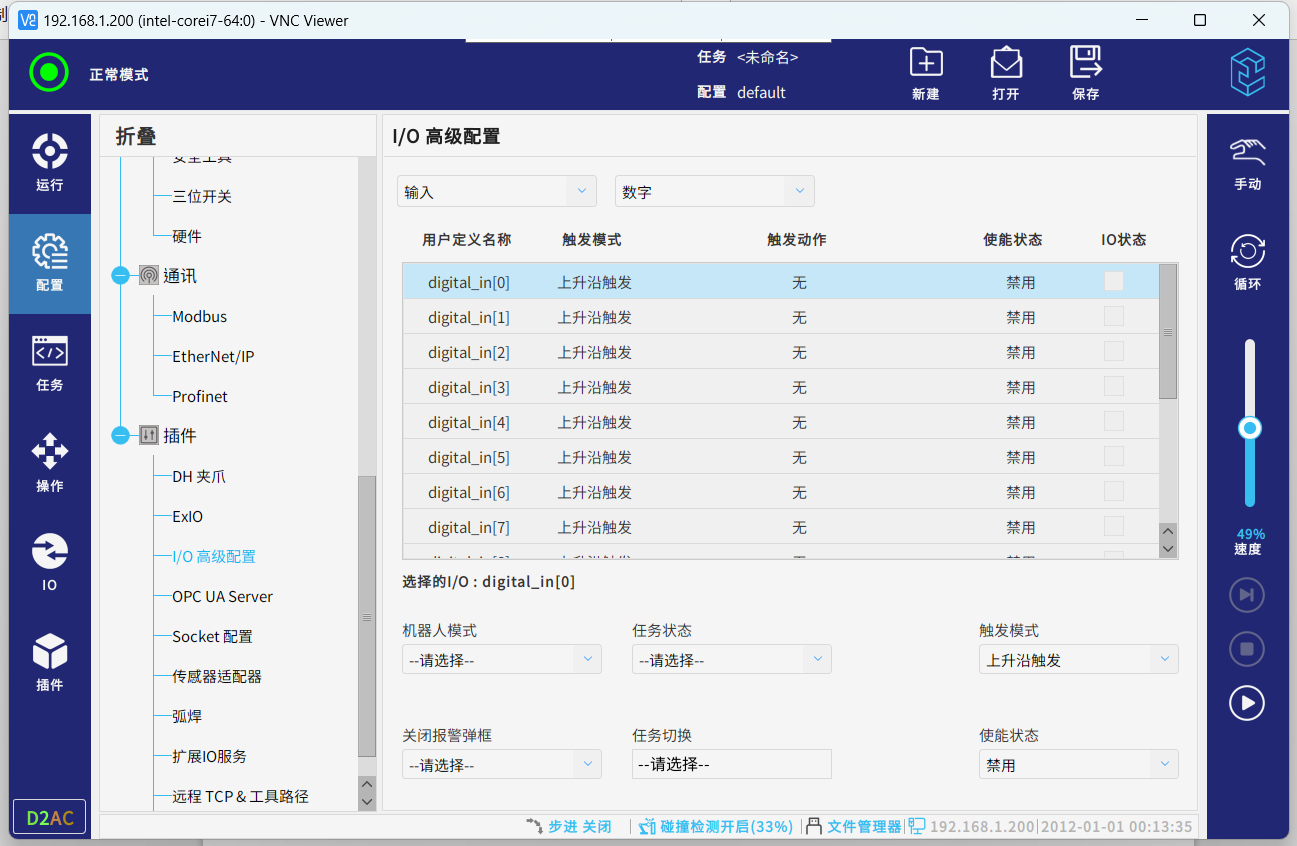
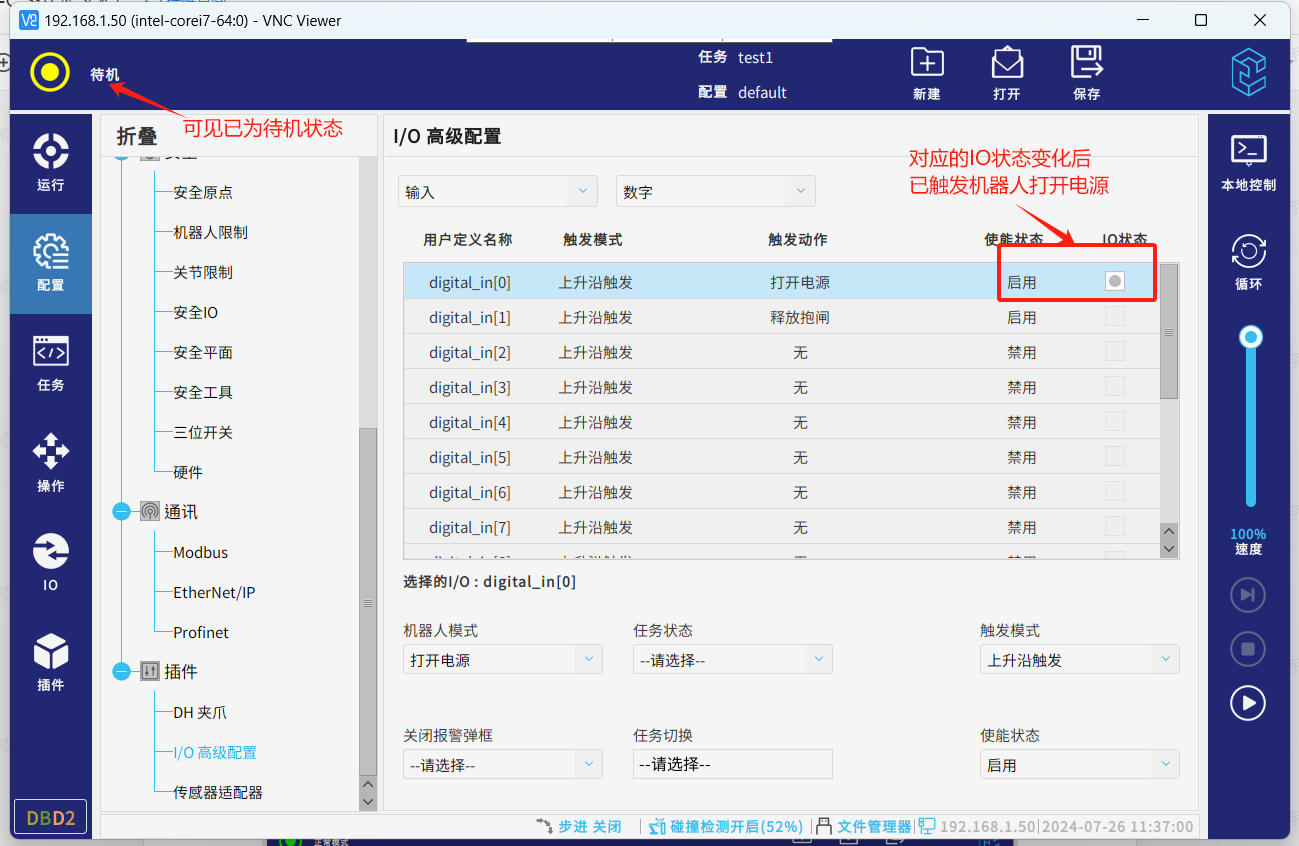
3.0关于IO启动时序示例
● 设置绑定完成后保存配置

● 设置完成后可发现机器人处于关闭电源时,对应的DI0已触发,机器人从关闭电源状态切换至待机状态。
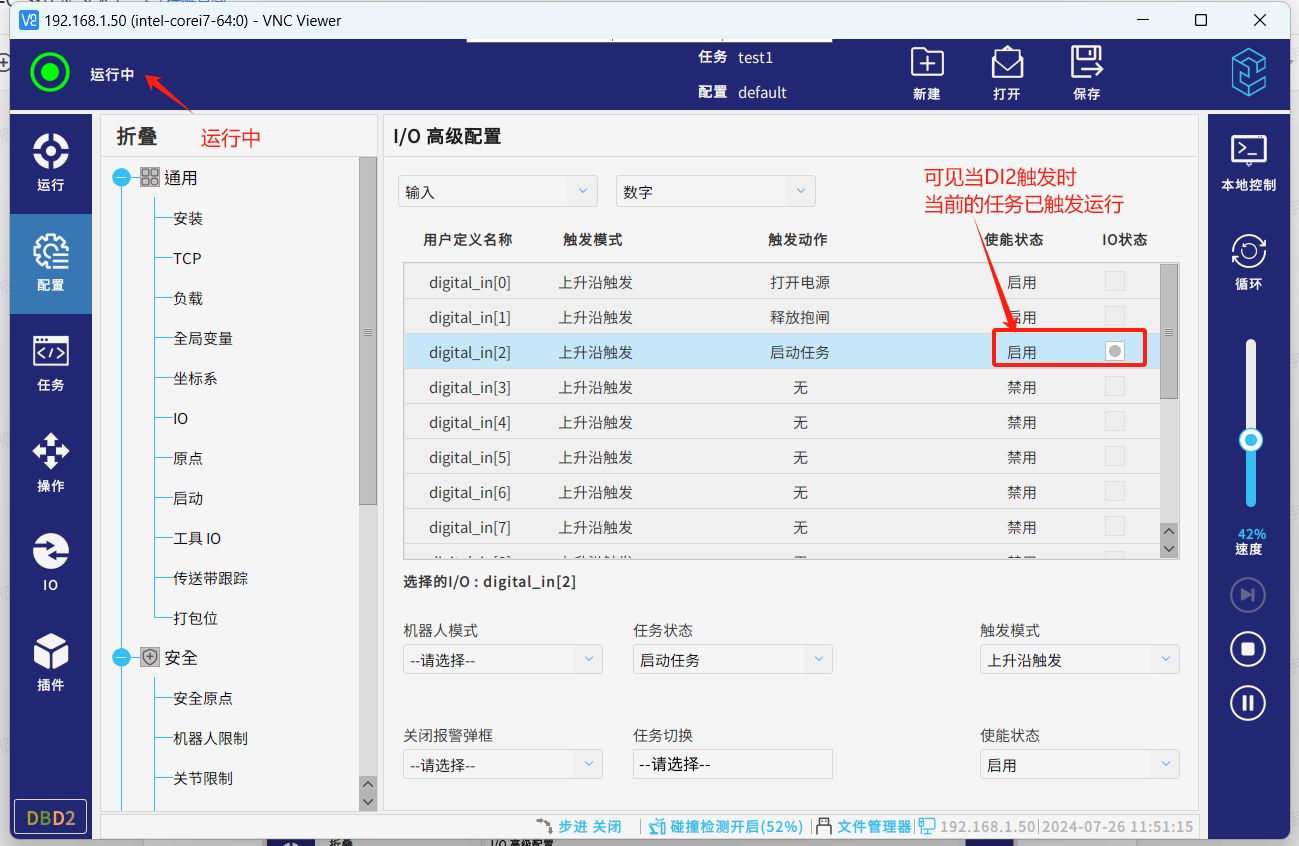
● 对应的DI1已触发,机器人从待机状态切换至正常状态。
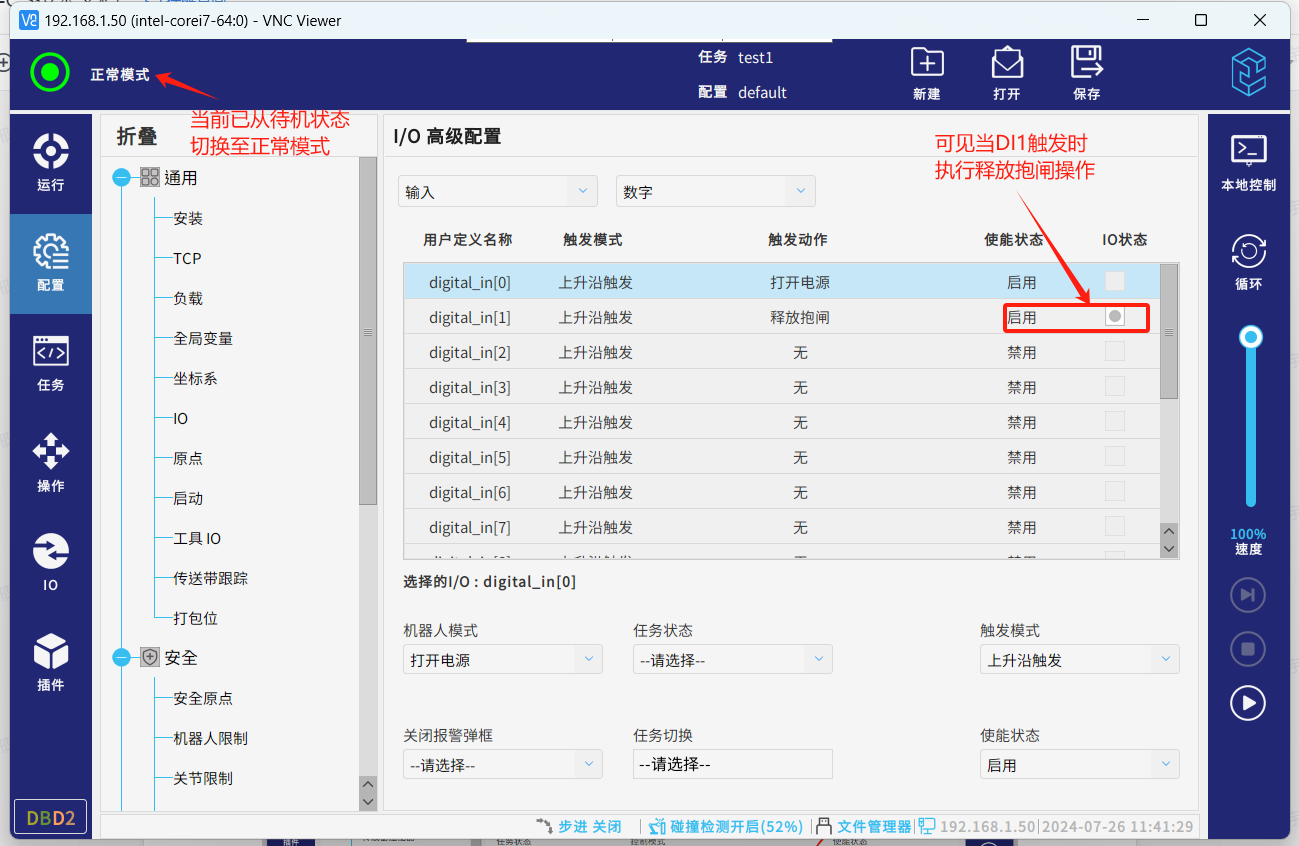
● 正常状态下可以手动移动机器人或者直接触发机器人运行已有的程序。
3.1关于IO输出状态绑定示例
● 设置绑定完成后保存配置
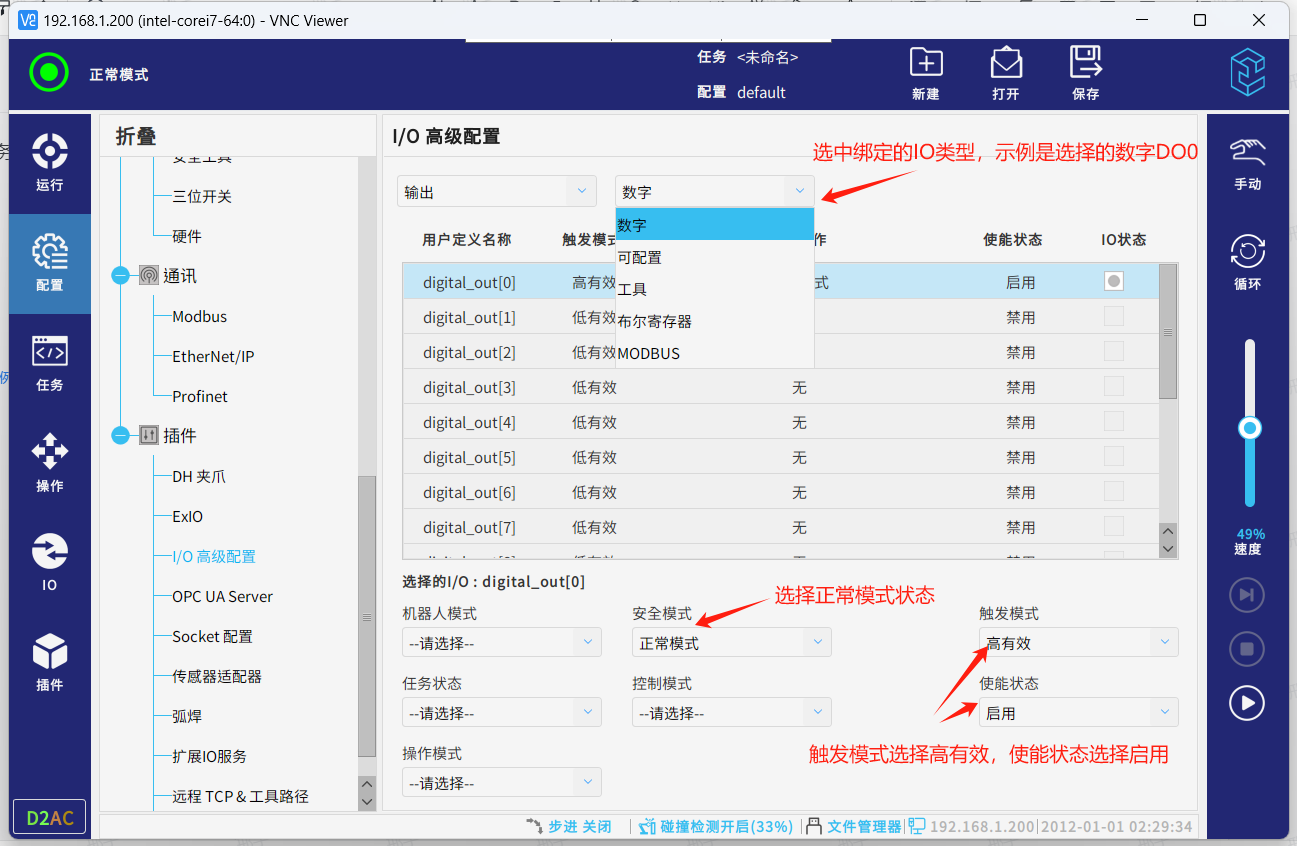
● 设置完成后可发现机器人处于正常模式时,对应的DO0已触发。
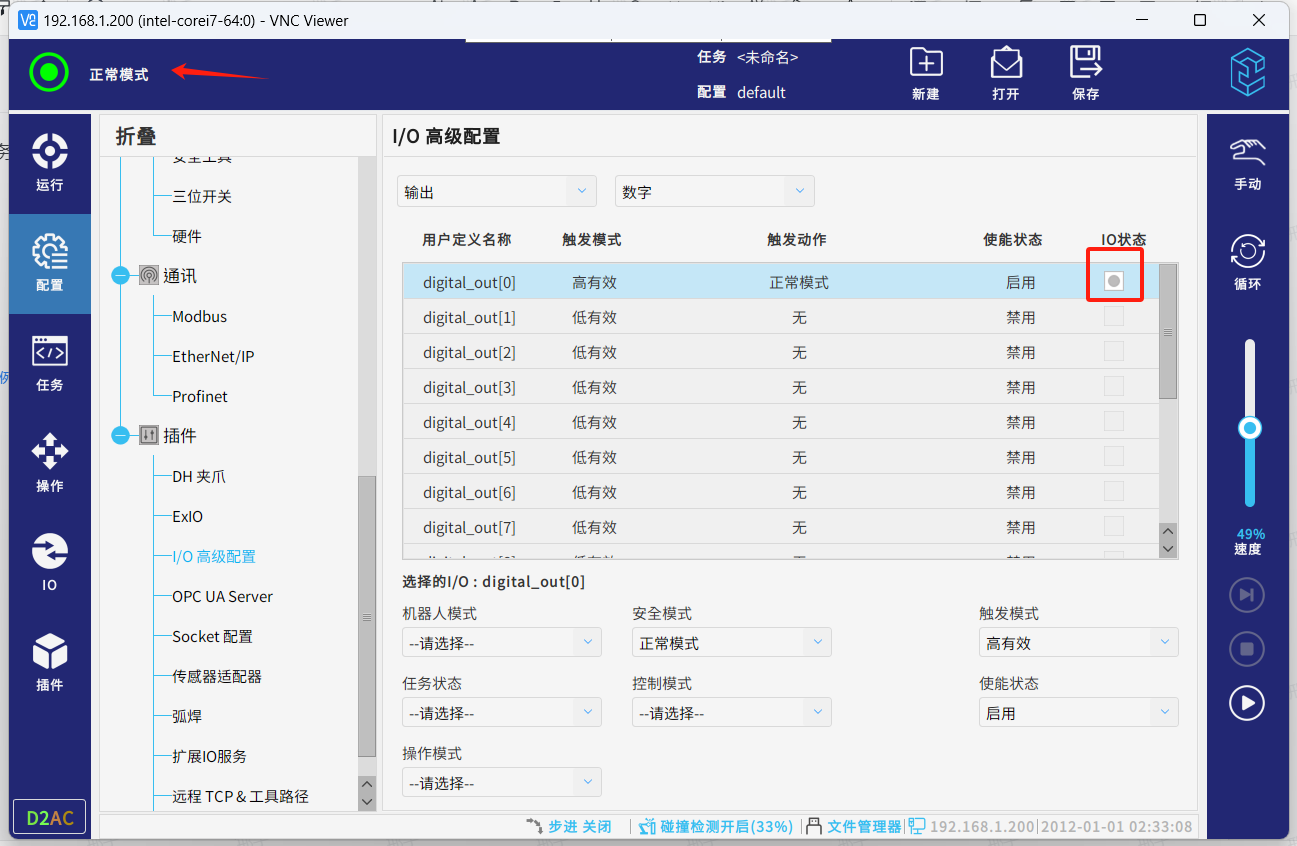
● 机器人处于其他状态下,对应的DO0恢复。

3.2关于IO输入状态绑定示例
● 绑定任务切换功能,选定任务后,保存配置。
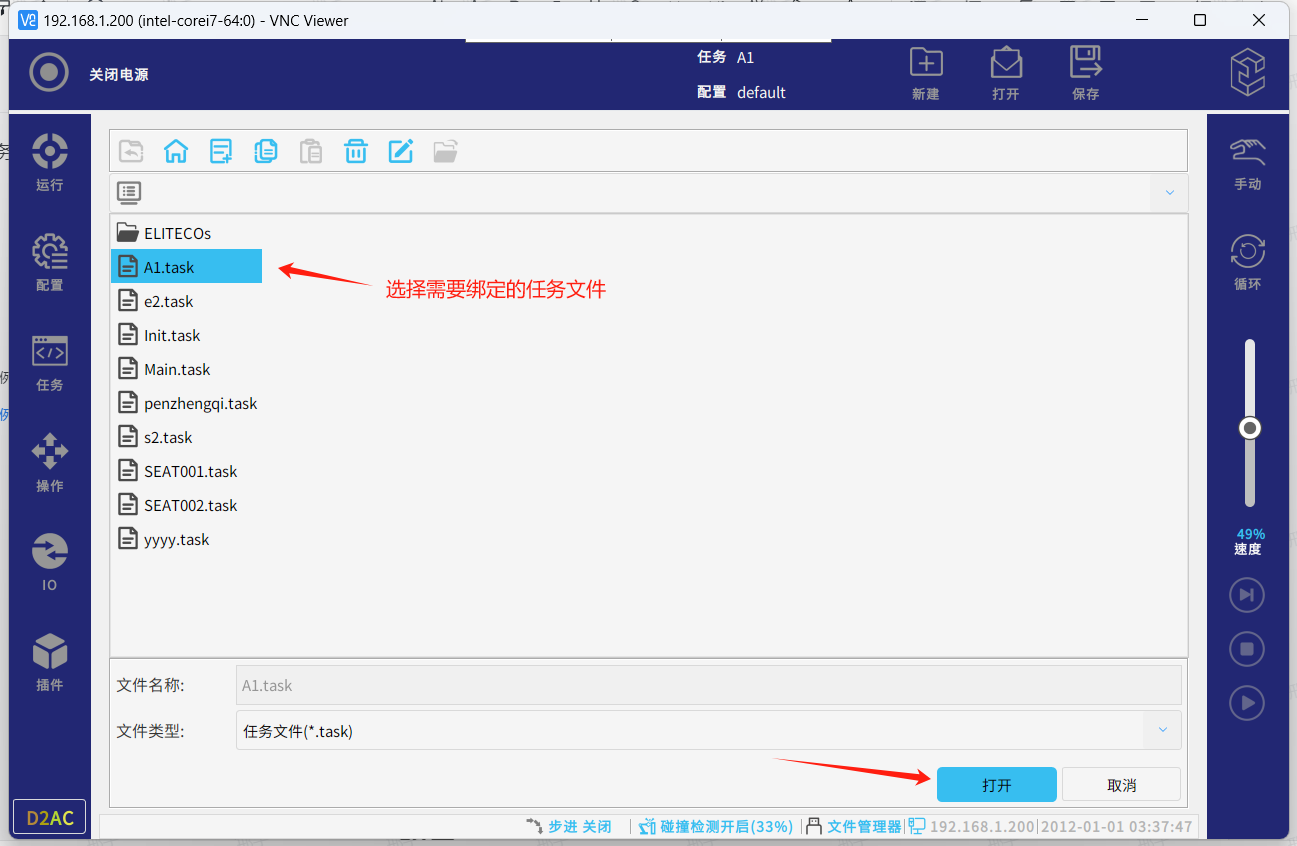
● 配置完成后保存配置。

● 触发输入信号后可见,绑定的任务从s2切换到A1。
注:不同配置下的任务,在切换时也会连同配置一起切换,但要注意的是在切换不同配置下的任务时,机器人会下电。
4. 常见问题解答
4.1 高级配置插件IO设置失败:
4.2输入信号功能说明
● 打开电源
解释:通过外部输入信号控制打开机器人电源
● 关闭电源
解释:通过外部输入信号控制关闭机器人电源
● 释放抱闸
解释:通过外部输入信号控制机器人释放抱闸
● 解除保护性停止
解释:通过外部输入信号控制机器人解除保护性停止
● 启动任务
解释:通过外部输入信号控制机器人运行当前打开的任务
● 停止任务
解释:通过外部输入信号控制机器人停止当前打开的任务,重新启动从程序首行开始运行
● 暂停任务
解释:通过外部输入信号控制机器人暂停当前打开的任务,重新启动从暂停行接着运行
输出信号功能说明
● 上电中
解释:当外部输入信号或者示教器上触发打开电源信号,机器人在未上电完成的过程中输出此信号,电源打开完成后自动复位信号输出。
● 电源关闭
解释:当机器人电源处于关闭状态下持续输出该信号,机器人电源打开完成后复位此信号
● 待机
解释:当机器人打开电源完成后,会从上电中信号跳转待机状态中持续输出信号,进入此状态后可以进行释放抱闸操作。
● 反向驱动
解释:机器人进入反向驱动模式后,持续输出信号,退出反向制动模式,复位输出信号
● 抱闸已释放
解释:当机器人抱闸释放完成后,持续输出信号。同时机器人也进入正常模式,当抱闸已释放和正常模式两个信号输出后,机器人就具备启动运行当前打开的任务。
● 等待校准
解释:该信号不建议使用,在释放抱闸过程中会触发输出由于信号复位时间较快,不建议使用接收此信号作为机器人状态判断条件,
● 正常模式
解释:代表此时非缩减、报警保护性停止、急停、安全违规等状态,能满足正常启动的 条件。如果机器人状态正常,处于“关闭电源"时,插件里面对应的“正常模式”也会有信号。
● 缩减模式
解释:机器人进入缩减模式后持续输出该信号(复位正常模式信号),退出缩减模式后复位信号。(需要在安全IO设置进入缩减模式信号和在关节限制选项中定义缩减参数)
● 保护性停止
解释:保护性停止主要用于处理非立即威胁生命但可能导致设备损坏或轻微伤害的场景, 如:碰撞检测和接近安全位置极限(安全平面、关节安全限位)会触发系统进入保护性停 止状态,这时就会持续触发输出IO信号,当系统退出保护性停止状态后,复位此信号
● 恢复模式
解释:机器人超出关节限制角度或超出设置安全平面后会进入恢复模式输出此信号,当关节角度或安全平面,恢复到设置正常范围内后,退出恢复模式,复位信号。
● 防护停止
解释:防护性停止的触发条件是控制柜防护停止回路断开后,持续输出此信号,当防护停止双回路恢复接通后复位信号。
● 系统紧急停止
解释:当在安全IO可配置信号设置紧急停止功能后,设置的双回路可配置信号断开,此信号会持续输出,恢复接通设置的可配置信号后,复位信号。
● 机器人紧急停止
解释:当示教器的急停按钮被按下或从控制柜接线引出的外部急停回路断开,持续输出此信号,恢复控制柜急停回路或者示教器急停按钮复位,复位信号。
● 安全违规
解释:指超出安全参数 比如速度过快、侵入安全平面输出此信号
● 安全故障
解释:硬件报警都是安全故障,比如伺服报警,机器人配置文件错误输出此信号
● 关节确认
解释:内部状态,不对外触发,新版本已经废弃
● 未定义
解释:内部状态,不对外触发,新版本已经废弃
● 报警状态
解释:报警状态包含系统紧急停止,机器人紧急停止,安全违规和安全故障,当系统处于这四个状态中的一个或多个时就会触发输出IO信号,当系统解除报警状态后,复位此信号
● 安全原点
解释:机器人当前位置在设置的安全原点位置1.7°范围内,机器人会持续输出此信号,机器人当前位置超出1.7°后,复位信号。


























