
















EC机器人打包
机器人需要打包至专用包装箱里情况下适用,原机器内自带对应型号的打包程序丢失情况下需根据包材机型重新导入或回正确零位后运行6轴打包角度。
1. 打包前机型与正确零位确认:
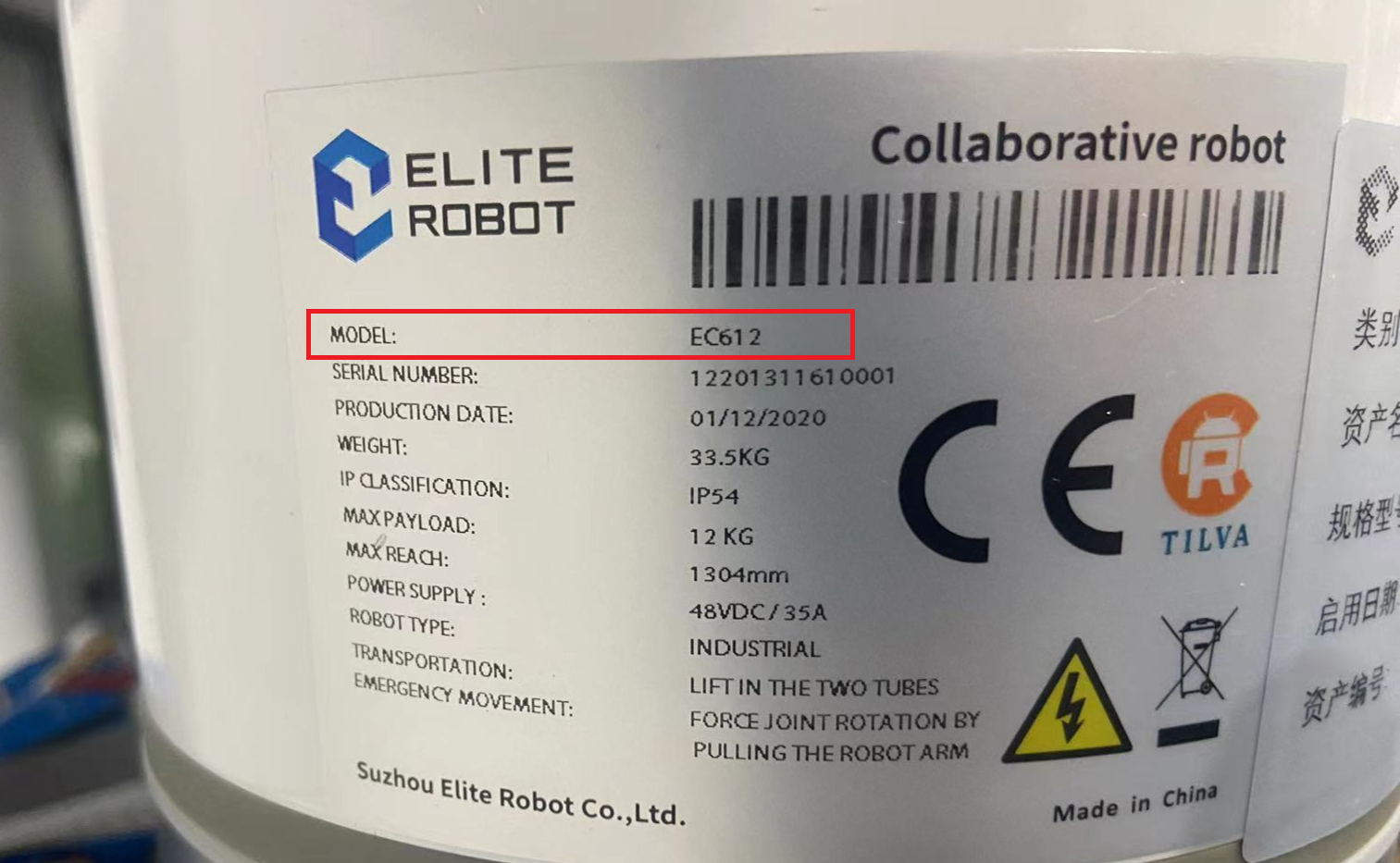
1.1.请确认机型
机型确认查看机器人基座1轴或控制柜铭牌MODEL为型号,如图列MODEL;EC612
1.2机器归于正确零位且拆除负载(确保无干涉),步骤及正确零位位姿如下图
进入回零位
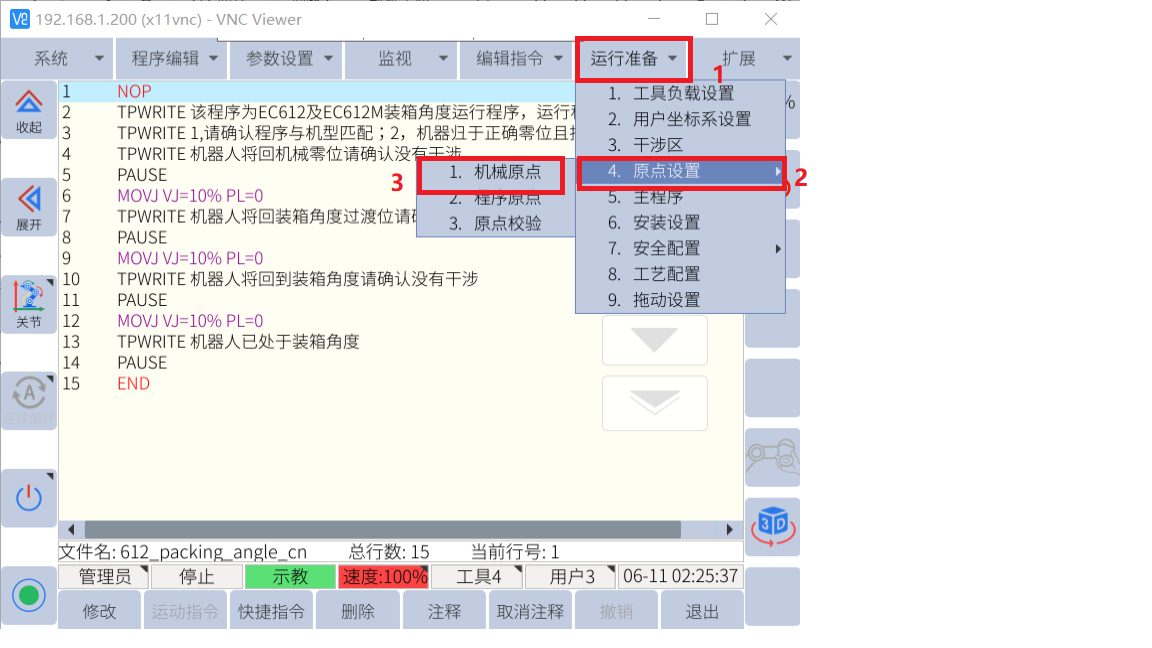
手动打开伺服点击回零

正确零位姿态

2.程序运行方法或输入包材机型6个轴角度方法回打包位
2.1EC系列共有6种产品,对应的打包姿态及程序名如下
确认包装包材型号
第一版方案姿态纸箱内部结构(EC66为列)

第二版方案姿态纸箱内部结构(EC66为列)

EC63
63_packing_angle(第一版打包方案程序名) 63_packing_angle.jbi
63_packing_angle_cn(第二版打包方案程序名) 63_packing_angle_cn.jbi
EC64
64_packing_angle_cn(打包方案程序名64_packing_angle_cn.jbi(仅一版)
EC66
66_packing_angle(第一版打包方案程序名) 66_packing_angle.jbi
66_packing_angle_cn(第二版打包方案程序名)66_packing_angle_cn.jbi
EC68
68_packing_angle_cn(第一版打包方案程序名)68_packing_angle_cn.jbi
EC612
612_packing_angle(第一版打包方案程序名) 612_packing_angle.jbi
612_packing_angle_cn(第二版打包方案程序名)612_packing_angle_cn.jbi
EC616
616_packing_angle_cn(第二版打包方案程序名)616_packing_angle_cn.jbi
2.2程序导入步骤(方法一)
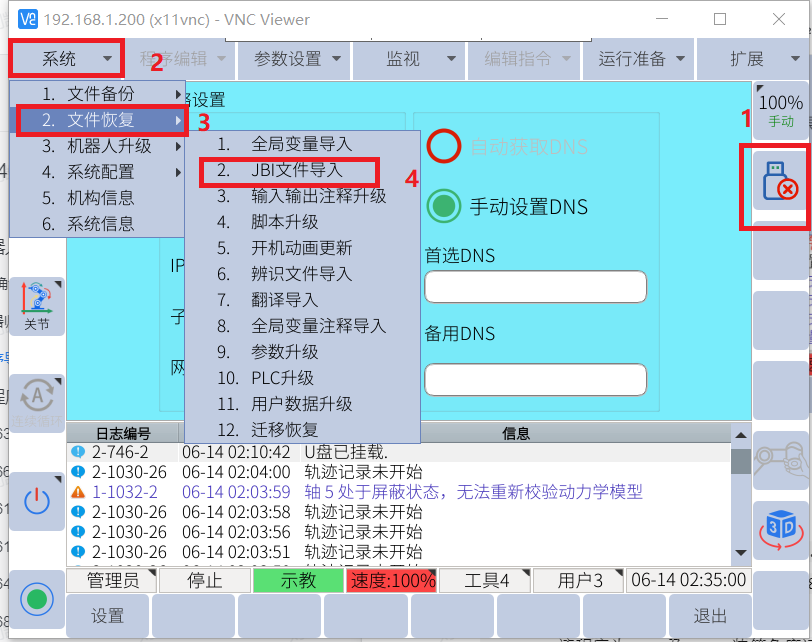
将对应机型打包程序文件放置u盘rbctrl文件夹里,U盘插到控制柜USB接口确认U盘识别成功如图标签1,示教器界面打包程序导入如2.34步骤操作如下
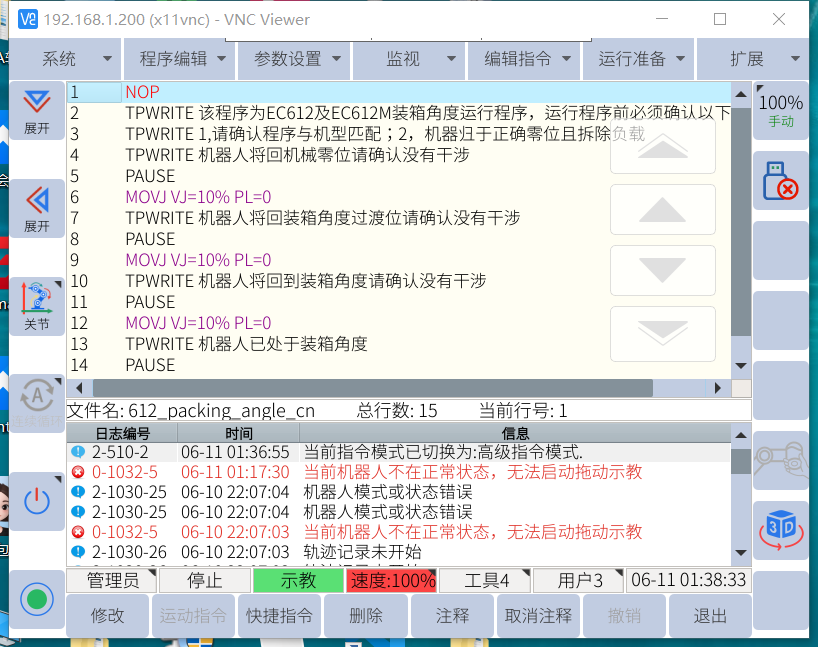
运行打包程序至归位(如下图示例)。
2.3机型打包姿态角度装箱(方法二)
可以用p变量里输入6个关节角度回打包位,如下图步骤选用一个未使用的P变量并打开。根据图片标签步骤执行。
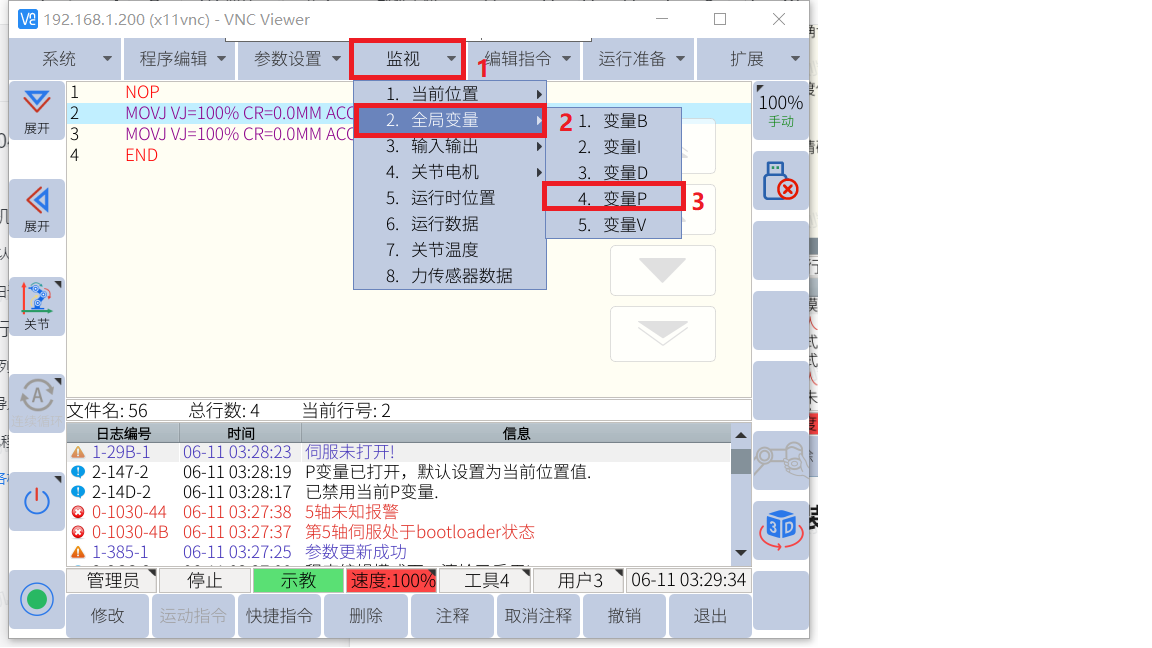

修改6个轴角度并运行,EC612示列


此时已完成至打包步骤。
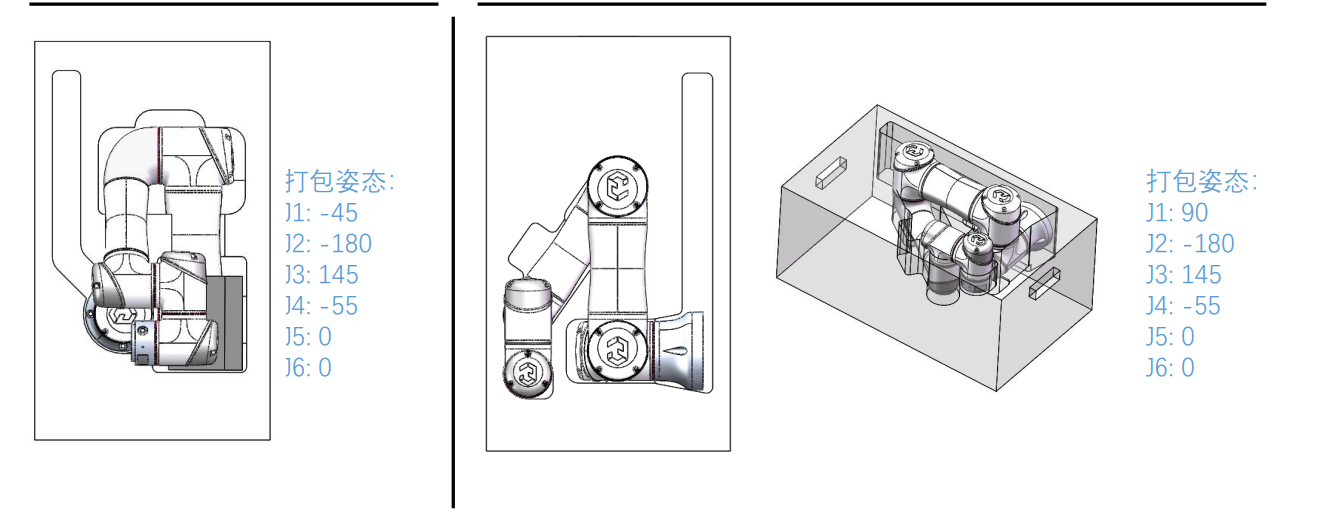
EC63
第一版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 145 J4: -55 J5: 0 J6: 0
第二版打包6个关节角度
打包姿态角度:J1: 90 J2: -180 J3: 145 J4: -55 J5: 0 J6: 0
EC64
第二版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 170 J4: -255 J5: 180 J6: 0
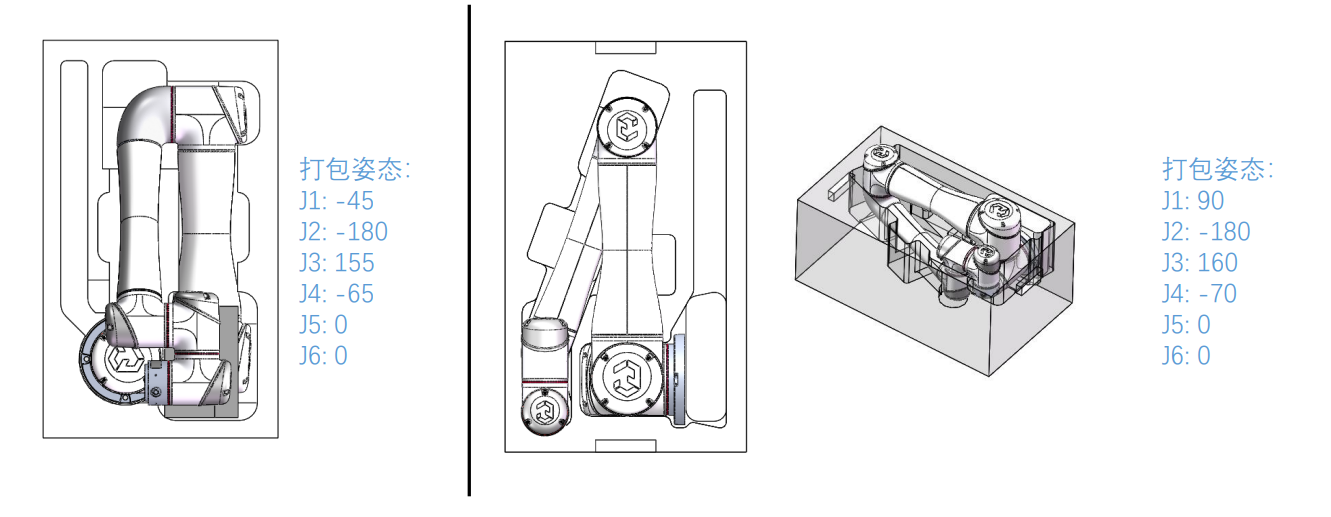
EC66
第一版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 155 J4: -65 J5: 0 J6: 0
第二版打包6个关节角度
打包姿态角度:: 90 J2: -180 J3: 160 J4: -70 J5: 0 J6: 0
EC68
第二版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 150 J4: -60 J5: 0 J6: 0
第三版打包6个关节角度
打包姿态:J1: 180 J2: -165 J3: 155 J4: -80 J5: 0 J6: 0
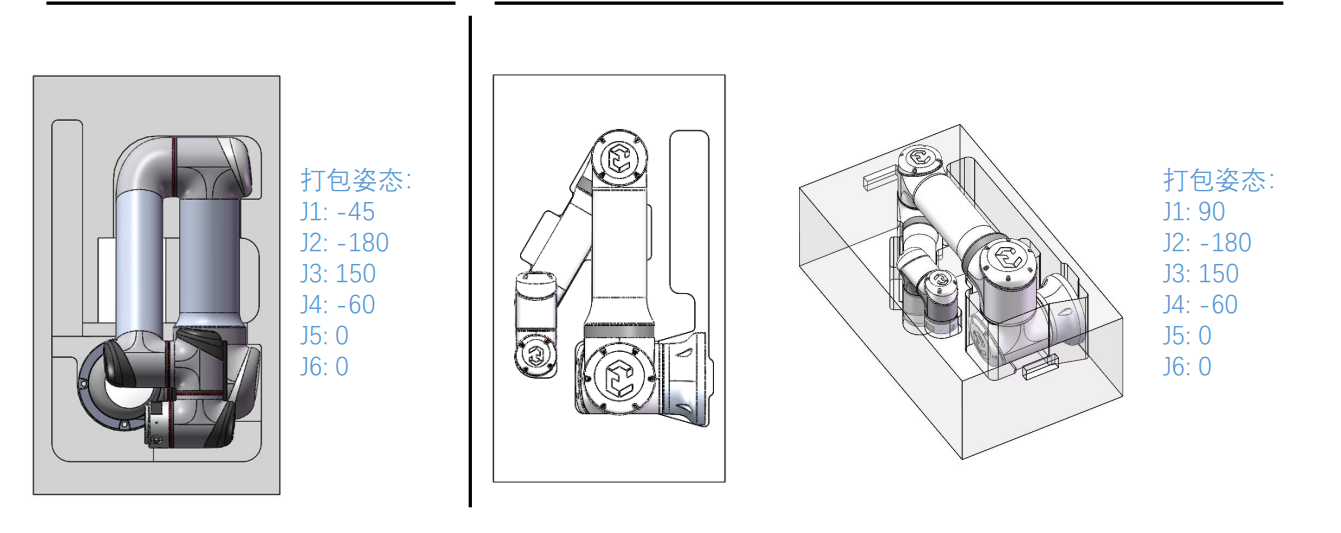
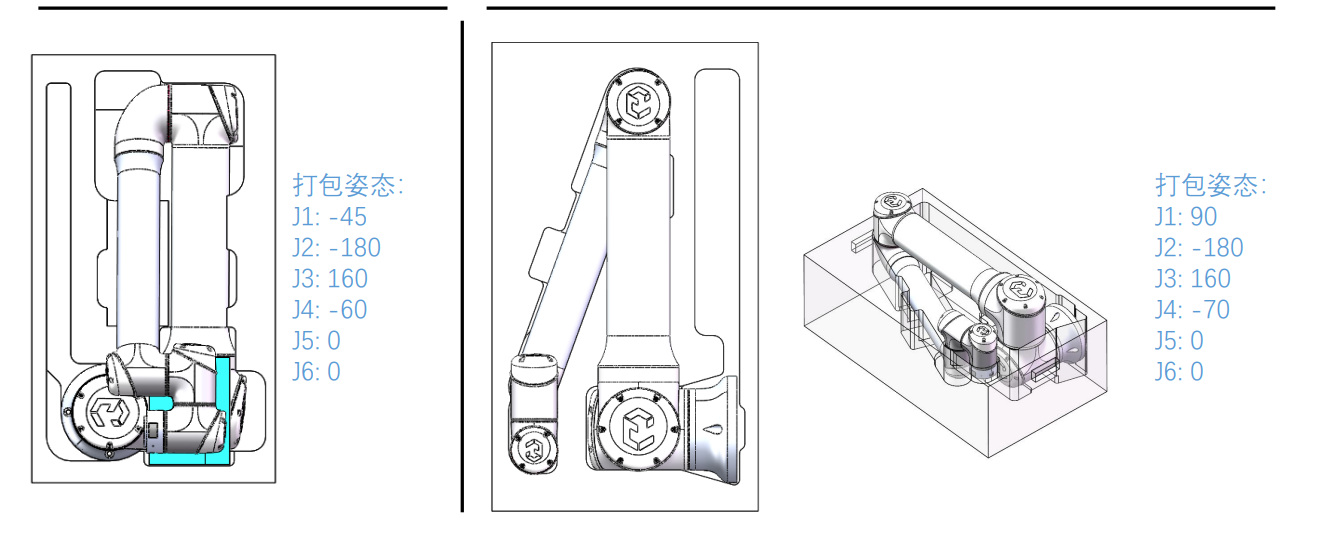
EC612
第一版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 160 J4: -60 J5: 0 J6: 0
第二版打包6个关节角度
打包姿态角度:J1: 90 J2: -180 J3: 160 J4: -70 J5: 0 J6: 0
EC616
第一版打包6个关节角度
打包姿态角度:J1: -45 J2: -180 J3: 150 J4: -60 J5: 0 J6: 0
第二版
打包姿态角度:J1: 90 J2: -180 J3: 150 J4: -60 J5: 0 J6: 0


























