
















EC机器人-USB-WIFI模块连接网页版示教器
1.硬件准备
1.1 USB-Wifi模块
USB-wifi的作用主要是通过USB接口向外提供wifi信号,便于其它设备进行连接。可连接最大长度约为14m左右,该模块是配件,需要向艾利特购买,如图:

物料号:NA20900405
1.2 平板电脑或笔记本电脑
准备一个平板电脑或笔记本电脑,分辨率不做要求。
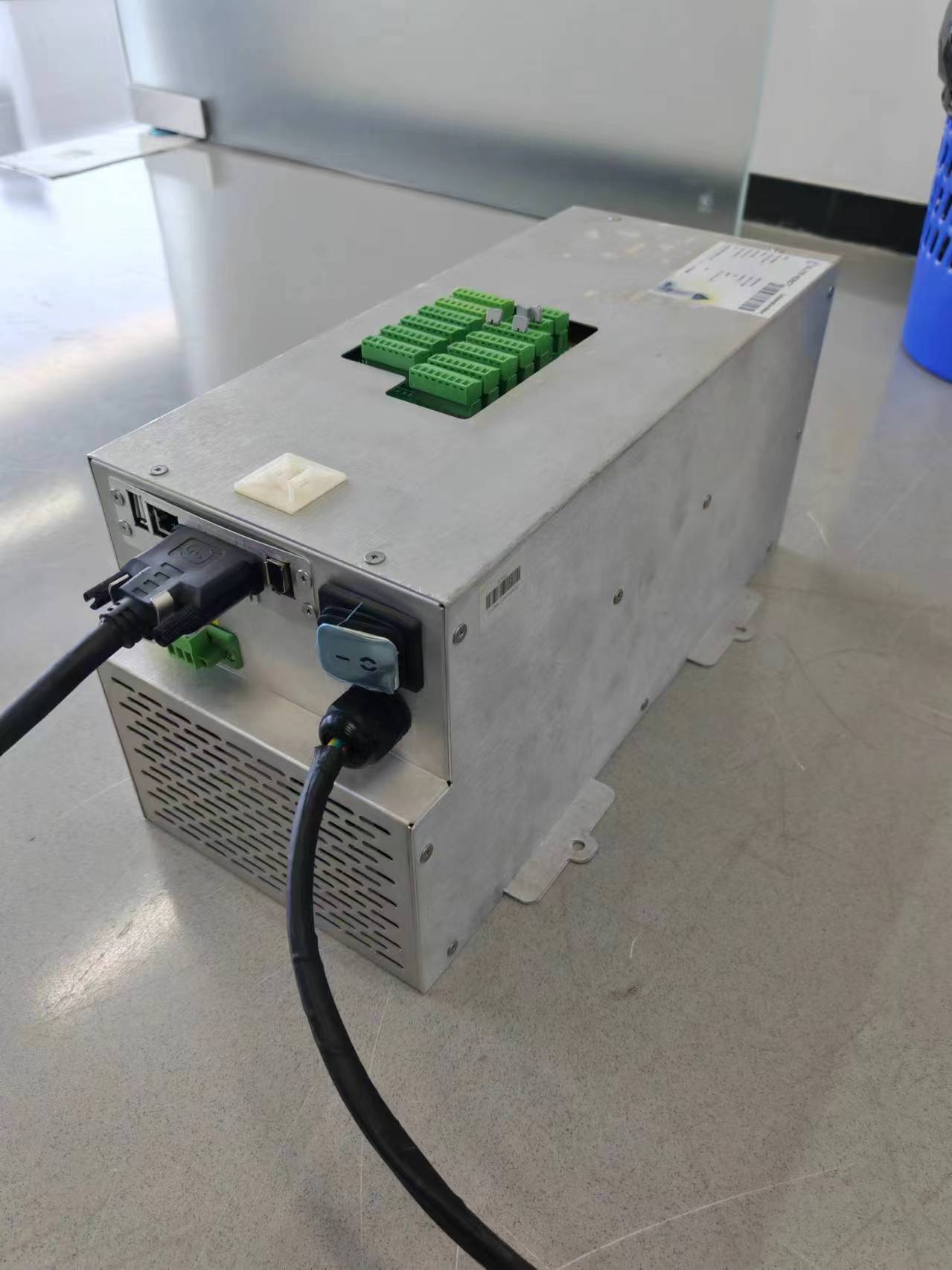
1.3 控制柜
适用控制柜:
拿到USB-wifi模块后,插入控制柜USB接口即可。
l A1控制柜 图例:

l B1,B2控制柜 图例:

l 老款mini控制柜 图例:
l 新款mini控制柜 图例:

1.4 适用版本
1.4.1 软件版本
USB-wifi模块适用的系统版本为:V3.12.2及以上。
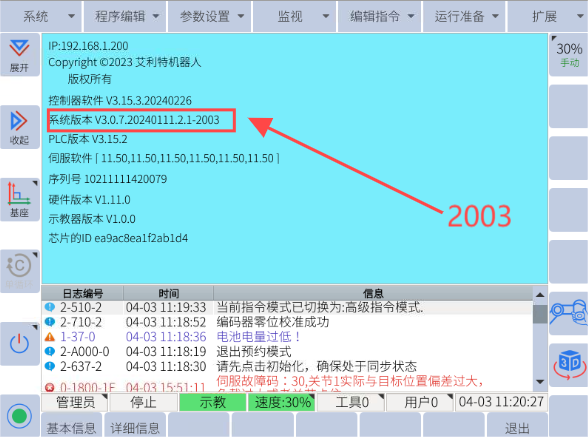
1.4.2 控制柜主板版本
网页版示教器适用的控制柜主板版本为“-2003”款的版本,如果是“-1000”款的版本,是无法连接网页版示教器的。查看方式:系统-----系统信息-----详细信息-----系统版本号后缀。如图:
2. 连接方式
2.1 平板电脑连接网页版示教器
2.1.1 操作步骤
(1)将准备好的USB-wifi模块插入控制柜的USB接口。
(2)网络下载安装包并安装,该软件包可在艾利特官网下载或者找艾利特工程师索取,下载链接如下:
https://www.elibot.com/service/technical?kw=&type1=&type2=&type3=&type4=&type5=167&wd=1&tp=1
下载好安装包后,在平板电脑上安装该软件,安装后软件显示如下:
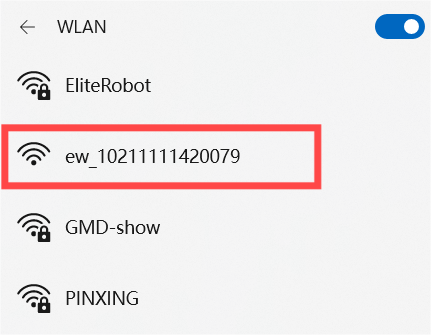
(3)在平板电脑上连接名称以“ew-序列号”的Wifi。
(4)打开提前安装好的Elite-APP,进入如下页面点击OK,进入网页版示教器。

(5)成功进入后会显示登录界面,输入用户名和密码即可进入网页版示教器操作界面。
用户名:admin
默认密码:elite2014

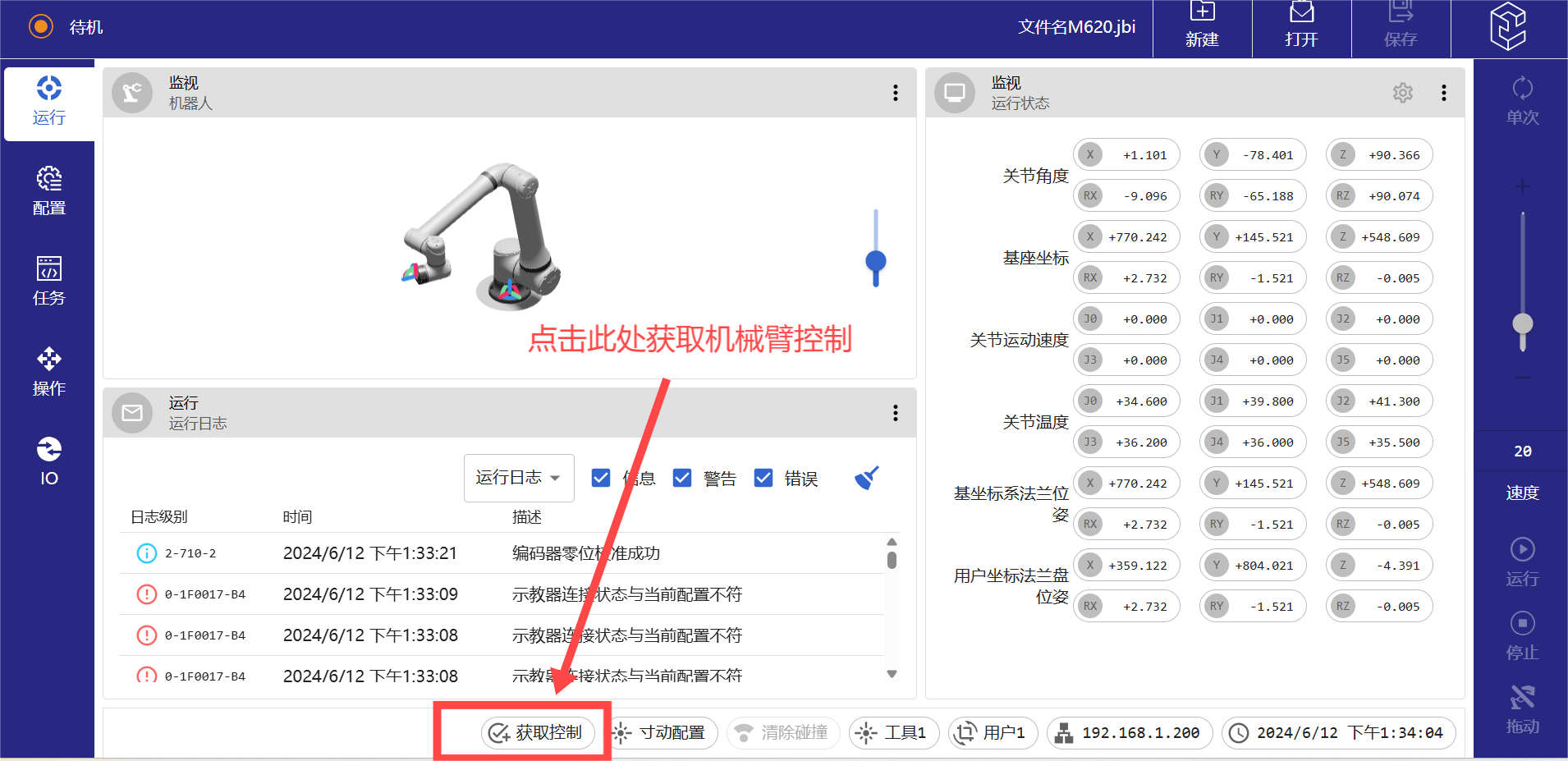
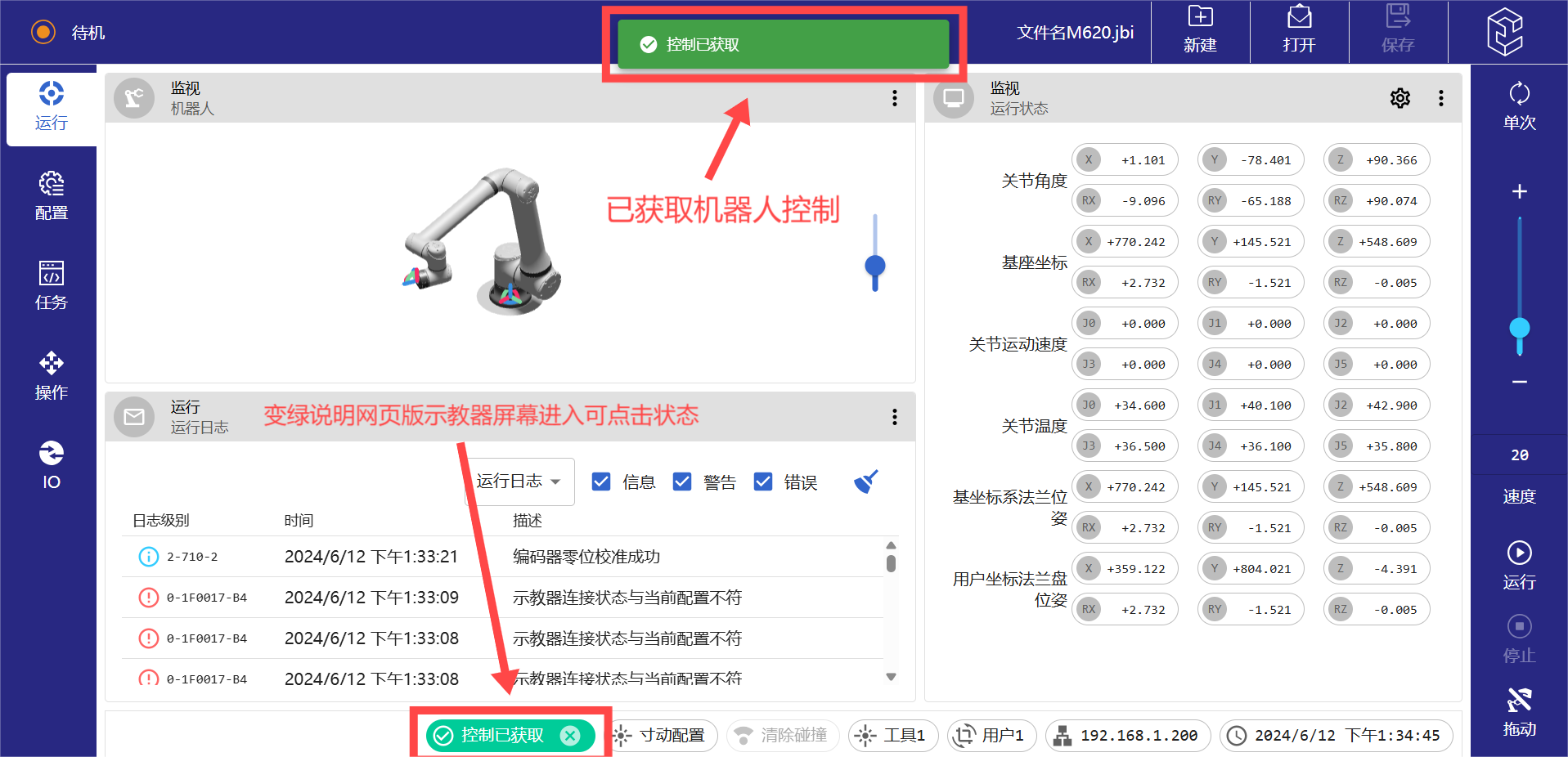
(6)进入操作界面后先点击下方菜单栏里面的“获取控制”,等获取控制按键从白色变为绿色,即可获取机械臂的操作权。
(7) 获取控制后,点击左上角的待机按钮

(8)进入待机界面后,依次点击打开抱闸,伺服使能,以及精确。如果使用的是迷你控制柜,第一步还有一个机械臂上电的按钮,点击上电按钮继续往下执行即可。



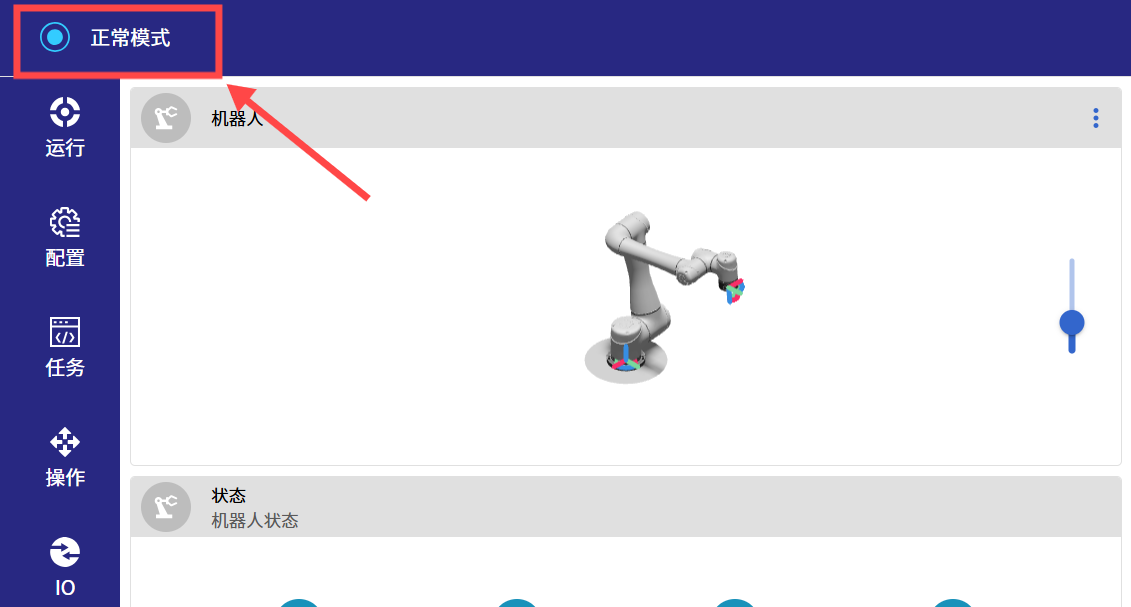
(9)进入精确模式后,机械臂每个轴会±旋转6度,进行编码器标定,之后后进入正常模式。机械臂可正常执行操作。
2.2 笔记本电脑连接网页版示教器
2.2.1 操作步骤
(1)将准备好的USB-wifi模块插入控制柜的USB接口。
(2)在电脑端连接以“ew-机械臂序列号”为网络名称的wifi网络。
(3)打开电脑端的浏览器,在网址栏输入“192.168.88.88:6680”点击回车即可。冒号为英文格式下的冒号。注意:使用USB-Wifi模块连接网页版示教器时,网址栏输入的地址只能是192.168.88.88:6680,不可以是机械臂的IP+:6680。

(4)之后会弹出用户名和密码框,用户名和密码如下:
用户名:admin
默认密码:elite2014
输入用户名和密码后点击登录。
(5)进入网页版示教器后首先要点击最下面菜单栏里面的 ‘ 获取控制 ’ ,等待获取控制按键变为绿色,即可正常上电松抱闸。如图:
(6)进入待机界面后,依次点击打开抱闸,伺服使能,以及精确。如果使用的是迷你控制柜,第一步还有一个机械臂上电的按钮,点击上电按钮继续往下执行即可。
(7)进入精确模式后,机械臂每个轴会±旋转6度,进行编码器标定,之后后进入正常模式。机械臂可正常执行操作。
2.3 使用平板电脑中自带的浏览器连接网页版示教器
2.3.1 操作步骤
(1)将准备好的USB-wifi模块插入控制柜的USB接口。
(2)在平板电脑上连接名称以“ew-序列号”的Wifi。
(3)打开平板电脑自带的浏览器,在浏览器搜索栏里面输入“192.168.88.88:6680”,点击搜索,即可进入网页版示教器登录界面。
(4)进入网页版示教器登录界面后,输入用户名和密码,点击登录即可进入网页版示教器的操作界面。
(5)进入网页版示教器后,和另外两种方法一样,先点击下方菜单栏里面的获取控制按键,等待获取控制按键从白色变为绿色后,即可操作网页版示教器上面的操作界面。
(6) 进入待机界面后,依次点击释放抱闸,伺服使能,以及精确。如果使用的是迷你控制柜,第一步还有一个机械臂上电的按钮,点击上电按钮继续往下执行即可。
(7) 进入精确模式后,机械臂每个轴会±旋转6度,进行编码器标定,之后后进入正常模式。机械臂可正常执行操作。
3. 注意事项
(1)使用USB-wifi模块连接网页版示教器时(电脑),网址栏输入的地址只能是“192.168.88.88:6680”,不可以是机械臂的IP+:6680。
(2)"192.168.88.88:6680"里面的冒号必须是英文格式下的冒号,不然会访问失败。
(3)如果有多台机械臂,都使用了USB-wifi模块,只需要在平板电脑端连接不同的ew_序列号的网络,即可控制该序列号下的机械臂。
(4)多个电脑可以同时连接一个USB-wifi模块,但是只能有一个操作面板来控制机械臂。如果想要获取机械臂的控制权,必须点击下方菜单栏里面的“申请获取控制权限”。
使用USB-WIFI模块之前,机械臂端首先应该进行如下操作:
(5)如果机械臂报警提示“机械臂未进入远程模式”或者“示教器连接状态未断开”需进行如下操作(示教器插头已拔出)。进入网页版示教器后,需点击下方获取控制按钮,获取机械臂控制权限,否则机械臂无法操作。然后点击右上角的设置界面,打开VNC,然后点击参数设置>控制器设置>示教器连接状态,把示教器连接状态改为断开。

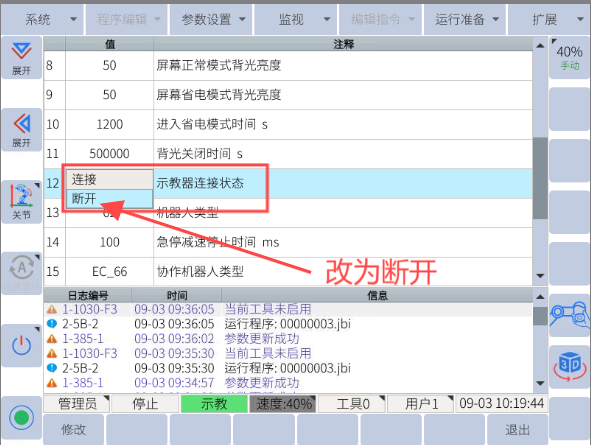
示教器右上角的钥匙应该切换置远程模式即可。



























