
















CS机器人轨迹节拍优化
1. 简介
客户现场正式生产的时候,客户会计算当前机械臂工作一个流程的时间,计算出它的UPH(单位小时产能,指每小时的产量)如果UPH达不到会要求机械臂减少运行ct 提高机械臂工作效率。
2. 操作流程
(1):提高机械手运动指令的速度,加速度,整体运行倍率 建议最大速度:
(图2-1 关节速度230°/S 关节加速度1200°/S²) (图2-2 直线速度1500mm/s 直线加速度10000mm/s²) (图2-3 整体运行倍率100%)
机器人运行速度计算是工具速度×运行倍率的才是真实速度
图2-1
图2-2
图2-3
(2):在一些不需要精确到达的点位(过度点)可以在当前路点勾选转接半径(图2-4默认 50 根据现场实际情况做出细微调整)图2-5是增加转接半径的效果
提示:转接半径,工作点(需要精确到达的点位)不能有值/不能加等待时间(此点必须运动流畅连续)等。
图2-4
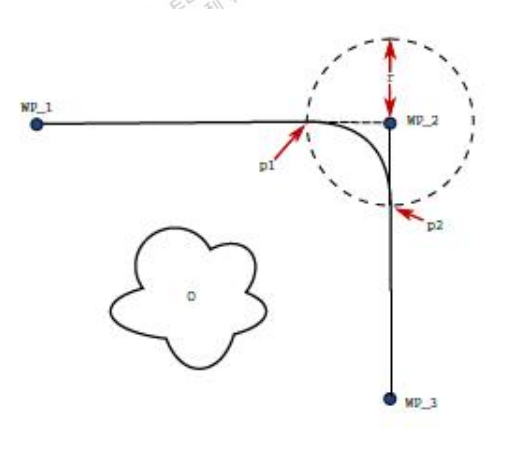
图2-5
(3):减少程序一些没必要的等待时间(与相机拍照/PLC/气缸/夹爪 等外部设备信号交互时) 比如:吸真空只需要0.5S就可以吸取产品 程序内设置1S 可以更改为0.5S
(4):姿态变化较大(RX,RY,RZ)的位置,优先选用关节运动。需要走直线(X,Y,Z)的推荐直线运动

(5).在调试过程中尽量避免 6 关节旋转(旋转 180°后者 360°)如果现场时间卡的非常紧凑并且第 6 关节必须要旋转 180°以上建议:
a:可以在机器人末端增加一个旋转气缸代替第 6 关节旋转
3. 常见问题解答
(1):问:直线加速度里面加速度可不可以设置150000mm/s²
答:不可以,设置到150000mm/s²会导致机械臂启动加速度
过大,会触发报警,无法运行。
(2):短距离运动加速度也不宜设置过大,会产生运行抖动。
(3)问:加速度是需要多长时间达到设定速度的时间
答:简单来说就是 v=a*t
v:机器人运行速度=工具速度是×运行倍率
a:工具加速度×运行倍率
注:这只是理论 还会受到一些停止时间 停止距离 运动 硬件最大加速度等等一些列限制,综合出来的结果。界面是目标加速度,真实情况不一定可以达到。


























