
















CS机器人初始化判断自动回原
1. 简介
1. 需要用到的指令:获取当前 TCP 位姿——get_actual_tcp_pose()
2. 根据现场实际情况区分·工作区域,工作区域分为两类:[a.能直接回安全点的区域,b.不能直接回安全点需要过渡点才能回到安全点]。
3. 通过获取当前机器人TCP姿态或度判断当前机器人在哪个工作区域,根据实际的工作区域避开干涉区安全回到机器人安全位。
4. 考虑到正在取料/放料的时候直接回安全位,可能会碰到料盘,治具等机器人接触之类的物品,所以在获取当前位置后直线上升到一个安全高度,不建议使用偏移Z+方向的方式抬高的方式,因为有可能在手动移动后,机器人已经在一个比较危险的高度,再次抬高可能会碰到上方物品,应该把安全点的高度赋值给当前位置的Z方向(根据现场实际情况选择直接赋值安全点的高度还是赋值一个固定的高度),运行后机器人会在原地上升或下降到一个安全高度,这样更安全。
5. 以下案例渡点的要求:a.这个过渡点必须能直接回到安全点 b.并且在这个工作区域无论在哪个位置都能回到这个过渡点。
2. 操作流程
1.由下图案例可将工作区域分为取料取料和放料区域,取料区域由图2-1可见在任意一点都可以回安全点,那么我们就可以直接判断是否在取料区域上升到安全高度直接回安全点即可。
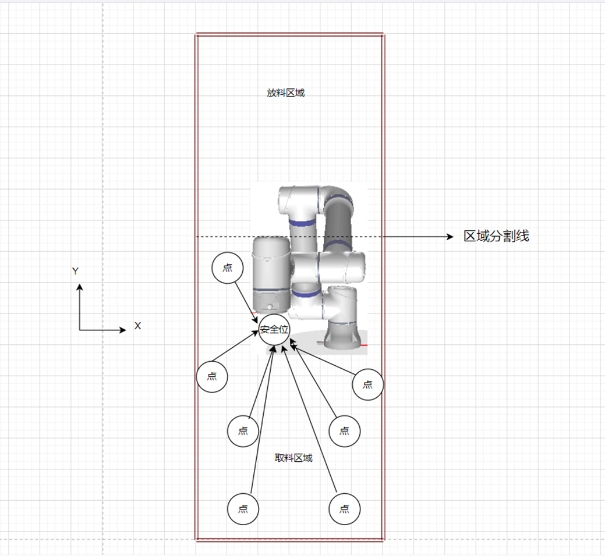
图2-1
2.需要手动移机器人取料区域最左端(+X方向)点,最右端(-X方向)点,最后端(+Y方向)点,最前端(-Y方向)点,记住这四个点的x,y最大值和最小值程序判断区域时需要用到,移哪个方向看哪个方向的值,如图2-2。
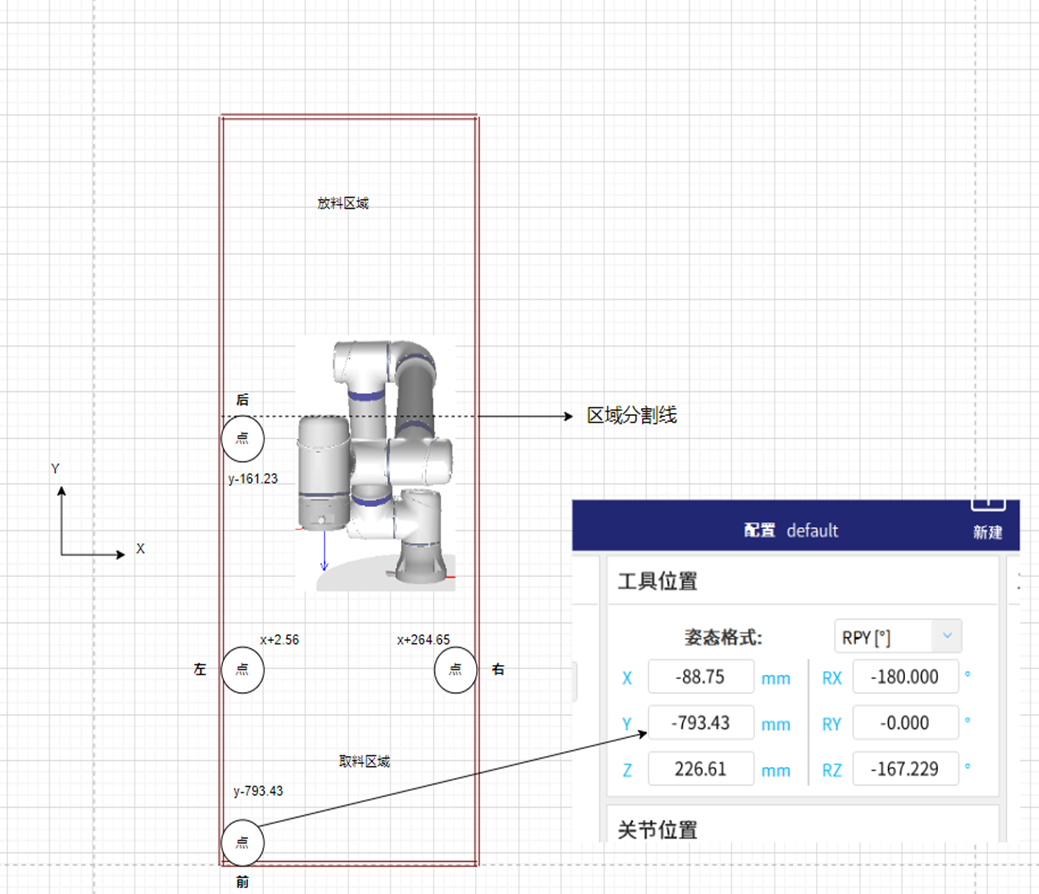
图2-2
由上图移动记录的数值判断取料区域的条件为2.56<x<264.65and-793.43<y<-161.23(单位mm,程序中单位必须为m)< span="">
3.由下图2-3路径可知机器人在放料区域随意点不能直接回原点,需要经过过渡点才能安全的回到安全点。
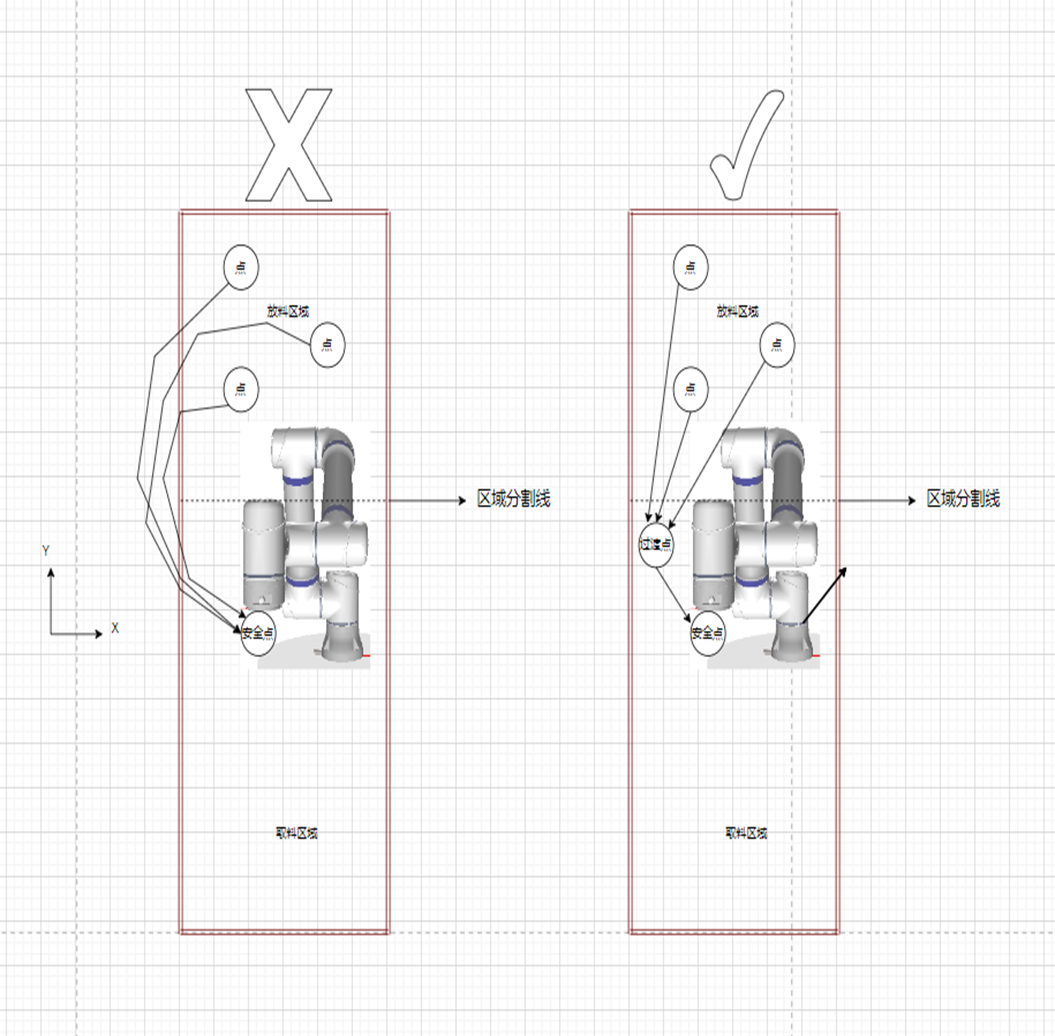
图2-3
4.通过手动移机器人到放料区域最左端(+X方向)点,最右端(-X方向)点,最后端(+Y方向)点,最前端(-Y方向)点,记住这四个点的x,y最大值和最小值程序判断区域时需要用到,移哪个方向看哪个方向的值,如图2-4所示。
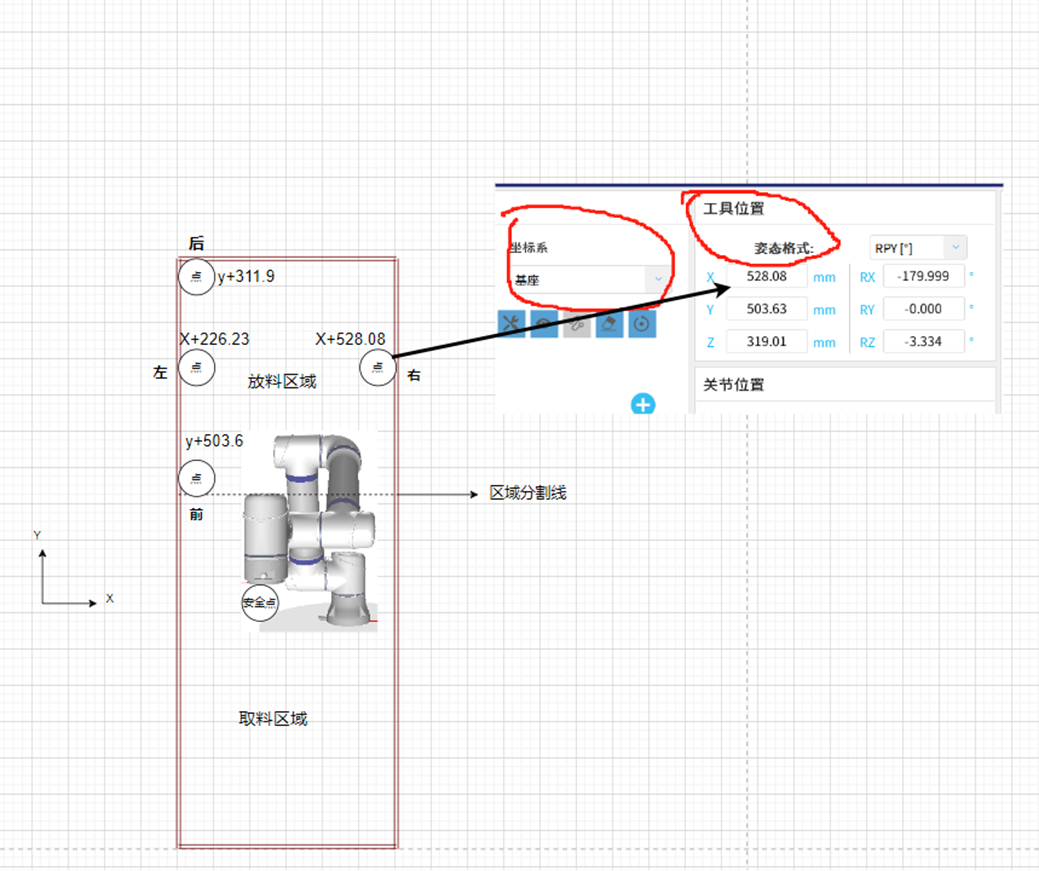
图2-4
由上图移动记录的数值判断放料区域的条件为226.23<x<528.08and331.9<y<503.6(单位mm,程序中单位必须为m)< span="">
5.程序如下图2-5↓:
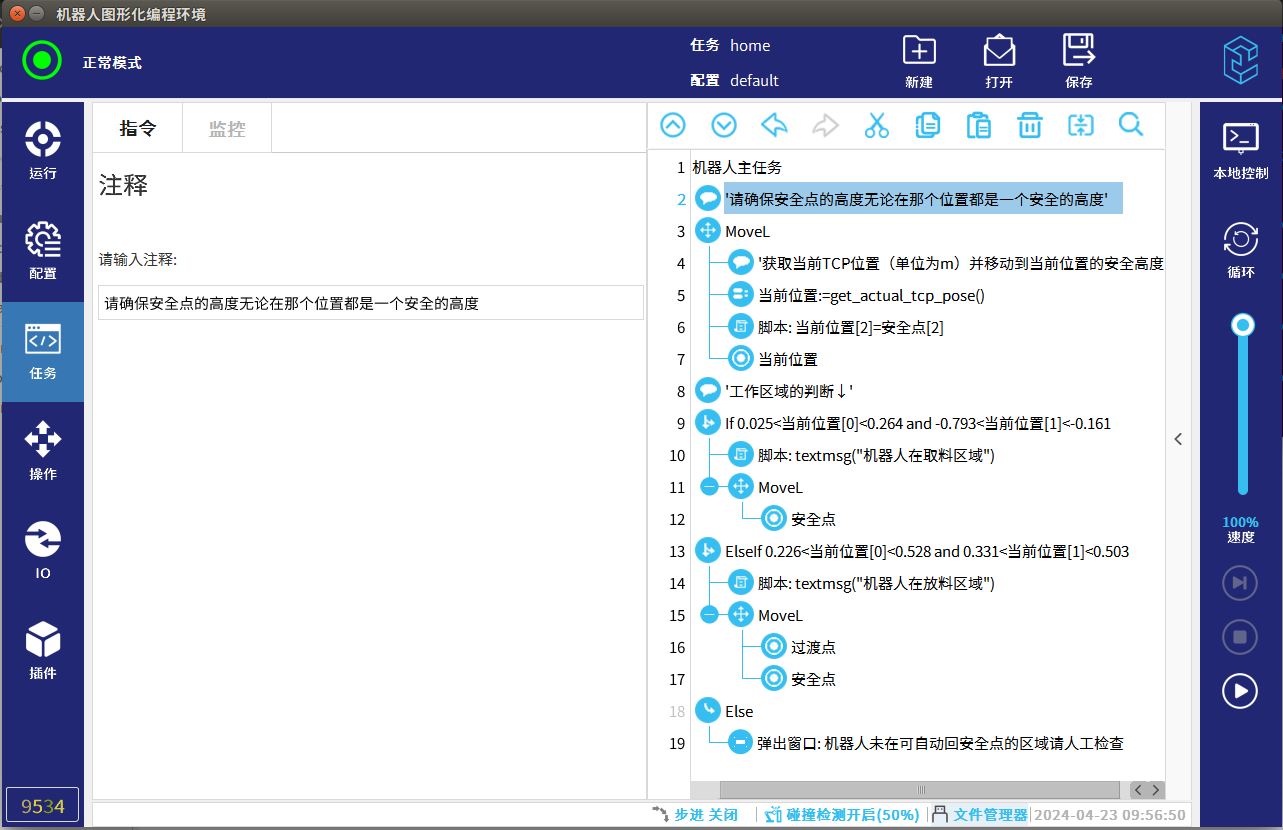
图2-5
3. 常见问题解答
1. 以上程序及点位数据不能直接用,根据现场实际情况划分工作区域判断xy方向的数值,根据实际情况加过渡点回安全点。
2. 通过获取当前 TCP 位姿--get_actual_tcp_pose()得到的数据单位为m,在程序里判断xy方向的单位也应该为m,其中当前位置[0]为X方向,当前位置[1]为Y方向,当前位置[2]为Z方向。
3. 自动回安全点的速度建议慢点,建议用直线运动,速度建议100mm/s。
4. 程序里面的安全点的高度必须确保无论在哪个位置都是一个安全高度。


























