
















CS机器人缩减模式,安全平面及软限位
1. 安全密码设置
安全密码可防止对安全参数配置进行未授权的更改。在使用安全功能配置之前,必须先设置安全密码。
注意:如果没有应用安全密码,将会提示设置安全密码。
1.1 操作步骤
1. 点击艾利特图标,进入设置界面。
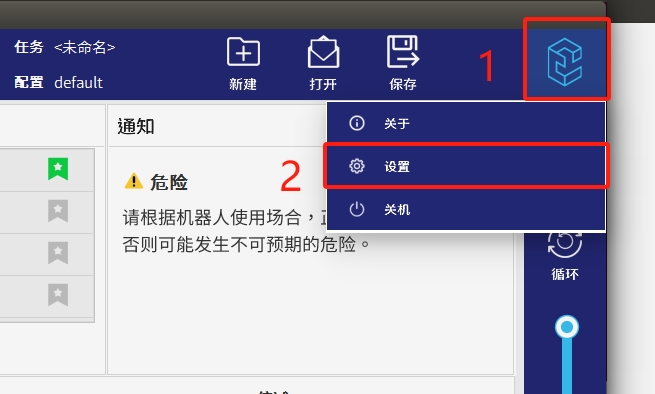
2. 设置安全密码
选择“设置> 密码> 安全密码”,通过设置安全密码来解锁安全配置相关参数。设置好安全密码后点击应用即可。

2. 缩减模式
2.1 功能介绍
1. 缩减模式是艾利特机器人的安全功能之一,他相对于正常模式而言,指机器人在运动过程中,一旦触发该模式,机器人会按照设定的速度,动量,功率等来运行,具体的参数设置可以通过“配置---机器人限制”中来设置。
2.2 参数配置
1. 修改缩减参数。
机器人限制界面有4个配置选项:最低限制、最高限制、次最低限制、次最高限制,供用户可选择。注意:在设置机器人限制参数时,正常模式下的数值要大于缩减模式下的数值。

2. 如果想要自定义缩减参数,需要在安全IO里面先设置缩减模式,可参考本文下一章节,否则无法自定义修改缩减数。
若不存在触发缩减模式的安全平面,即安全平面中“限制”未配置为“触发缩减模式”,或安全 IO 中不存在配置为“缩减模式”的可配置输入 IO,缩减模式的参数无法修改。
3. 设置缩减参数。

参数说明:
● 停止时间:限制机器人从运动到停止需耗费的最长时间
● 停止距离:限制机器人工具从运动到停止可移动的最大距离
● 工具速度:限制机器人工具移动的最大速度
● 肘部速度:限制机器人手腕移动的最大速度
注意:在设置机器人限制参数时,正常模式下的数值要大于缩减模式下的数值。
4. 如果机械臂进入缩减模式,右上角会变成黄色指示按钮,机械臂末端法兰指示灯会变为绿蓝交替灯状态。

2.3 应用类型
2.3.1 安全平面
缩减模式的应用场景之一是安全平面配置缩减模式的功能,具体功能参考“3. 安全平面”。
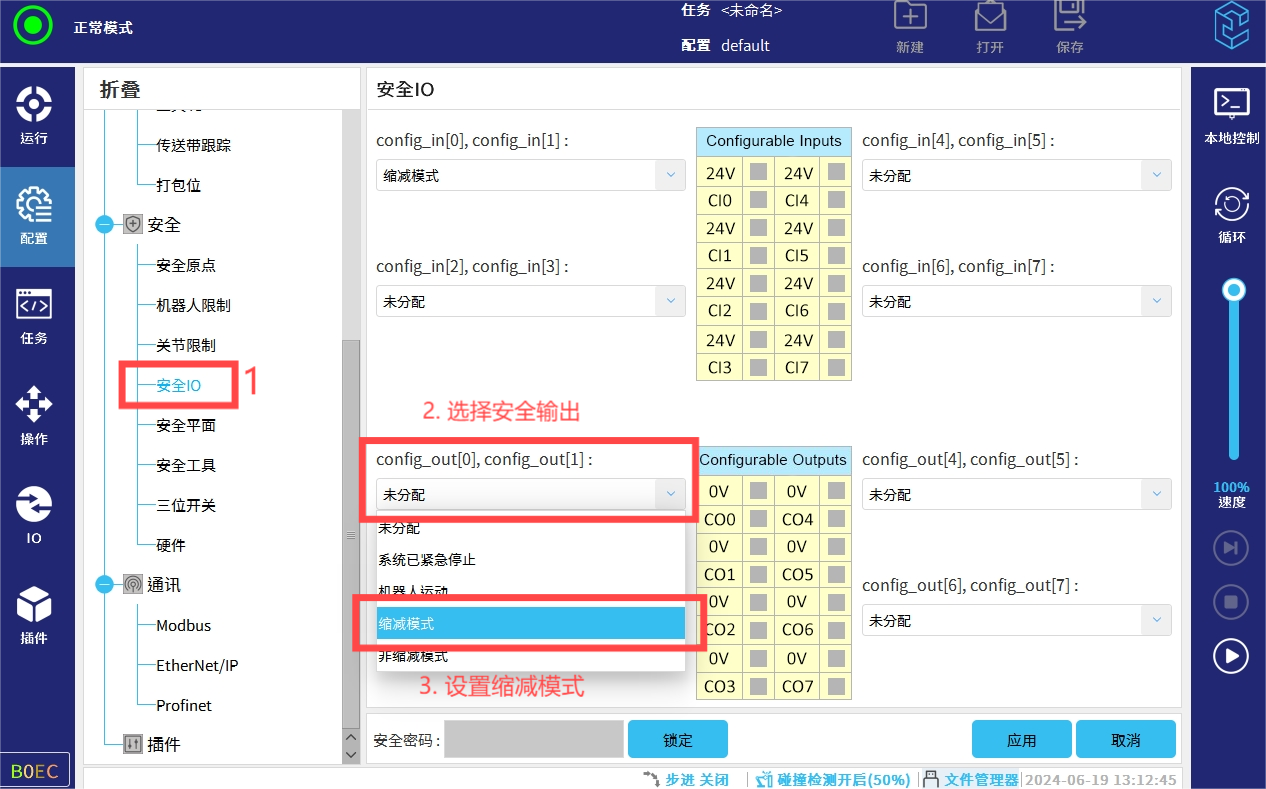
2.3.2 安全IO
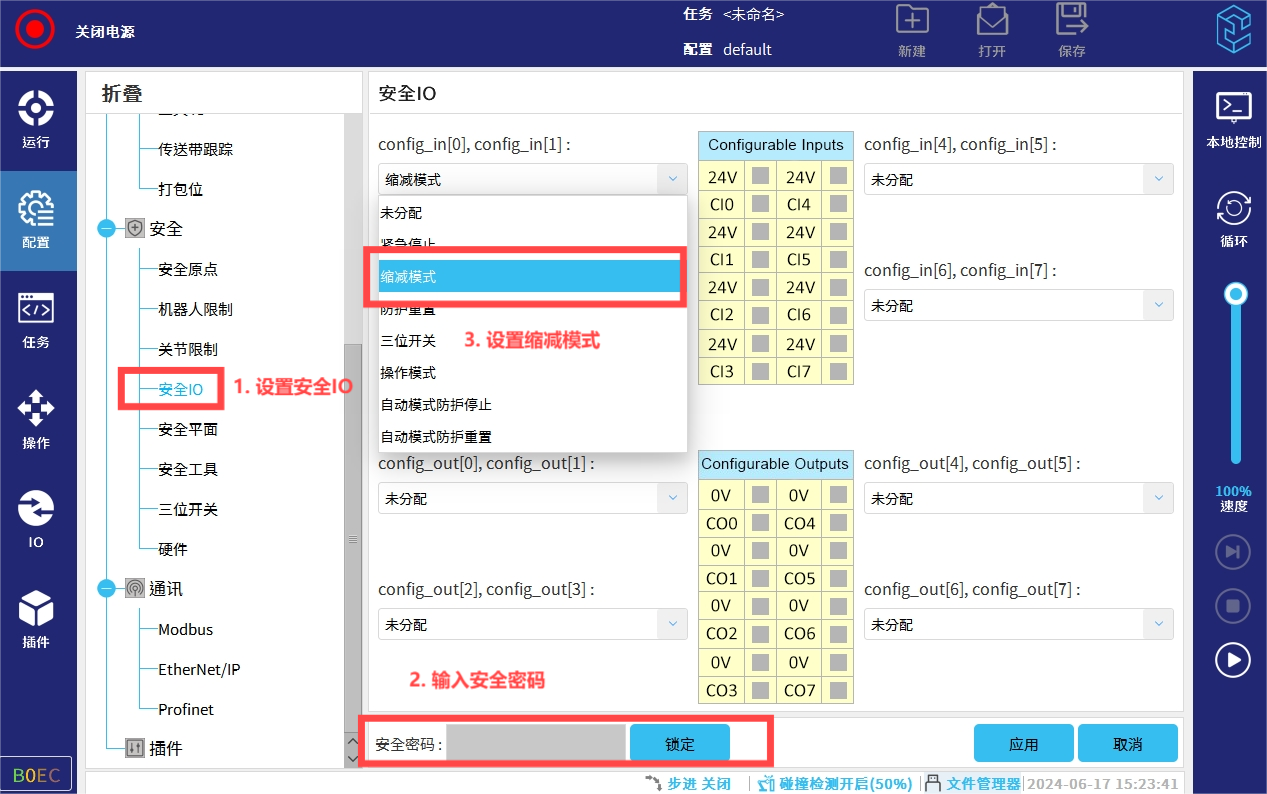
缩减模式的应用场景二是在安全IO功能配置界面的安全输入/输出选项中,可以选择配置缩减模式信号,以实现不同的功能。
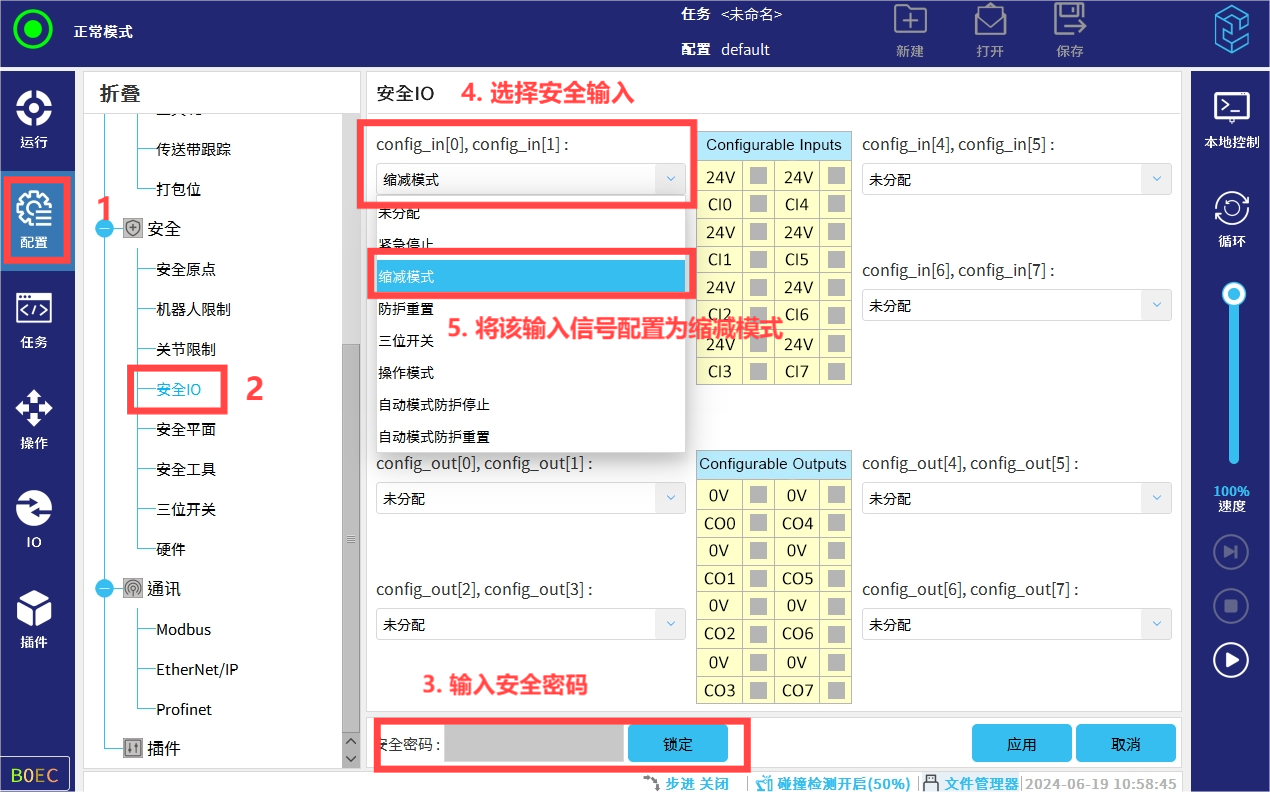
安全输入缩减功能配置,在<配置-----安全io-----安全输入config_in[0~7]-----缩减模式>。该功能的主要作用是外部控制安全输入信号来使机械臂进入缩减模式。选择输入信号为“缩减模式”,低电平有效。当输入信号都为低电平时,机器人为“缩减模式”;当输入信号为一高一低时,机器人会发出安全报警;而都为高电平,机器人为“正常”模式。
安全输出缩减模式配置,在<配置-----安全io-----安全输出config_out[0~7]-----缩减模式>。该功能的主要作用是当机器人本体处于缩减模式,或安全输入配置了“缩减模式”输入且当前信号为低电平时,将发送低电平信号;否则信号为高信号。
3. 安全平面
3.1 功能介绍
安全平面是艾利特机器人安全功能之一,所创建的安全平面可以限制机器人的工作空间。用户最多可定义8个安全平面用来限制机器人工具和肘部。安全平面的配置是基于坐标系来进行的。配置安全平面前,我们建议您创建用户坐标系。安全平面只限制机器人本体的工具和肘部,对机器人本体的整体限制无影响。
3.2 操作步骤
要设置安全平面需要先设置一个坐标系,因为安全平面是基于你设置的坐标系的X,Y平面的Z方向平移来确定具体位置的。用户坐标系的设置请参照用户手册上面设置。

2. 输入安全密码,进入安全平面设置界面。
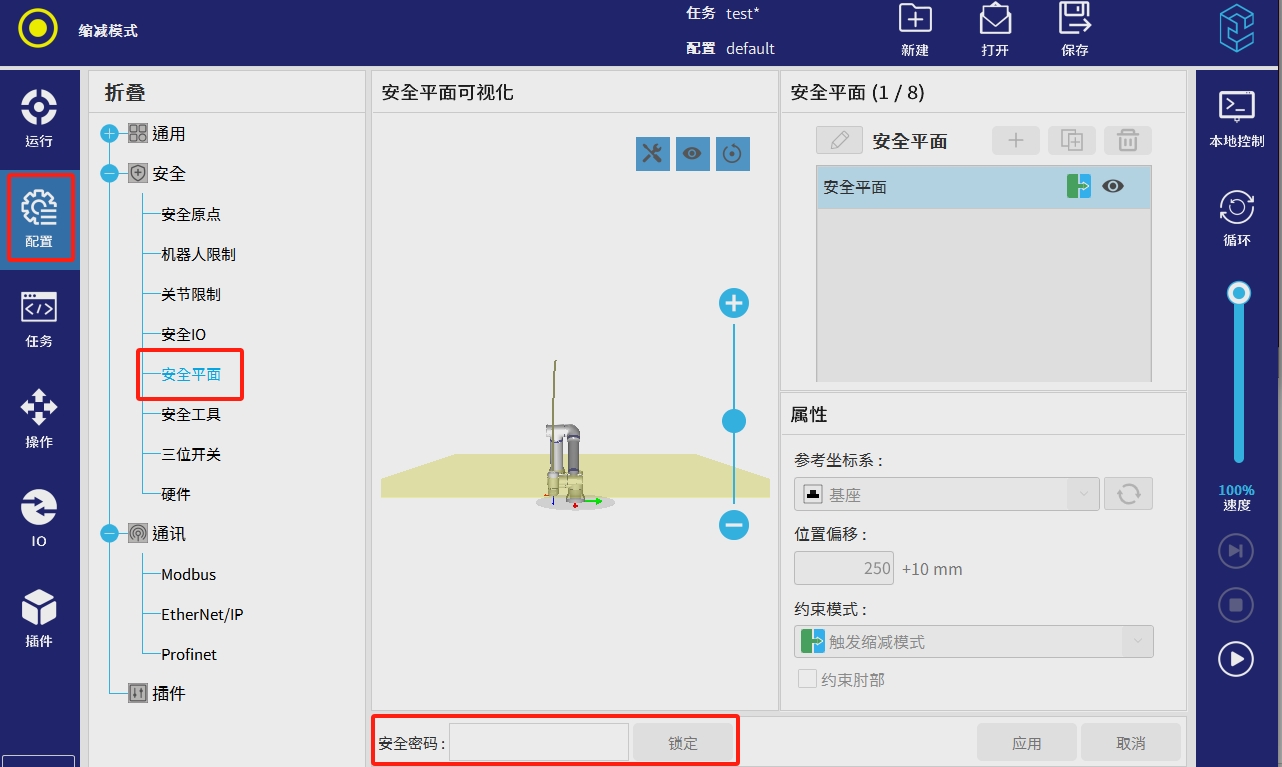
3. 添加新的安全平面,一共可以设置8个安全平面,选择坐标系。

4. 选择好之前建立的坐标系或者基坐标系,通过位置偏移来确定平面位置,该位置偏移是通过增加或者减小该坐标系的Z轴坐标来实现平面位置的偏移。该平面的Z+方向是正常区域,Z-方向是限制区域,机械臂工具中心点到达该平面及该平面Z-方向区域会触发相应的约束模式,缩减模式或者防护停止。如果机械臂进入防护停止,会自动进入安全恢复模式,手动把机械臂的工具中心点移动到Z+方向上面,机械臂才能再次正常使用。

注意:位置偏移后面的参数 “ +10mm ” 的意思是机械臂工具中心点靠近安全平面10mm处就开始触发所设置的模式了。
5. 设置约束模式,即机械臂末端法兰上工具坐标系触碰到该平面触发的功能,一共有4个模式。用户可以为每个安全平面配置约束模式。这4个模式的作用如下:
● 禁用:在该状态下,安全平面从不激活;
● 正常模式有效:机器人处于“正常”模式时,该安全平面生效。机器人工具或肘部接触或超出安全平面时,机器人保护性停止;
● 缩减模式有效:机器人处于“缩减”模式时,该安全平面生效。机器人工具或肘部接触或超出安全平面时,机器人保护性停止;
● 正常&缩减模式有效:机器人处于“正常”模式或“缩减”模式时,该安全平面生效。机器人工具或肘部接触或超出安全平面时,机器人保护性停止;
● 触发缩减模式:机器人工具或肘部接触或超出安全平面,系统切换至缩减模式。
注意:若勾选“约束肘部”后,安全平面将会限制机器人本体的肘部。可不勾选肘部,按需而定。
4. 软限位
4.1 功能介绍
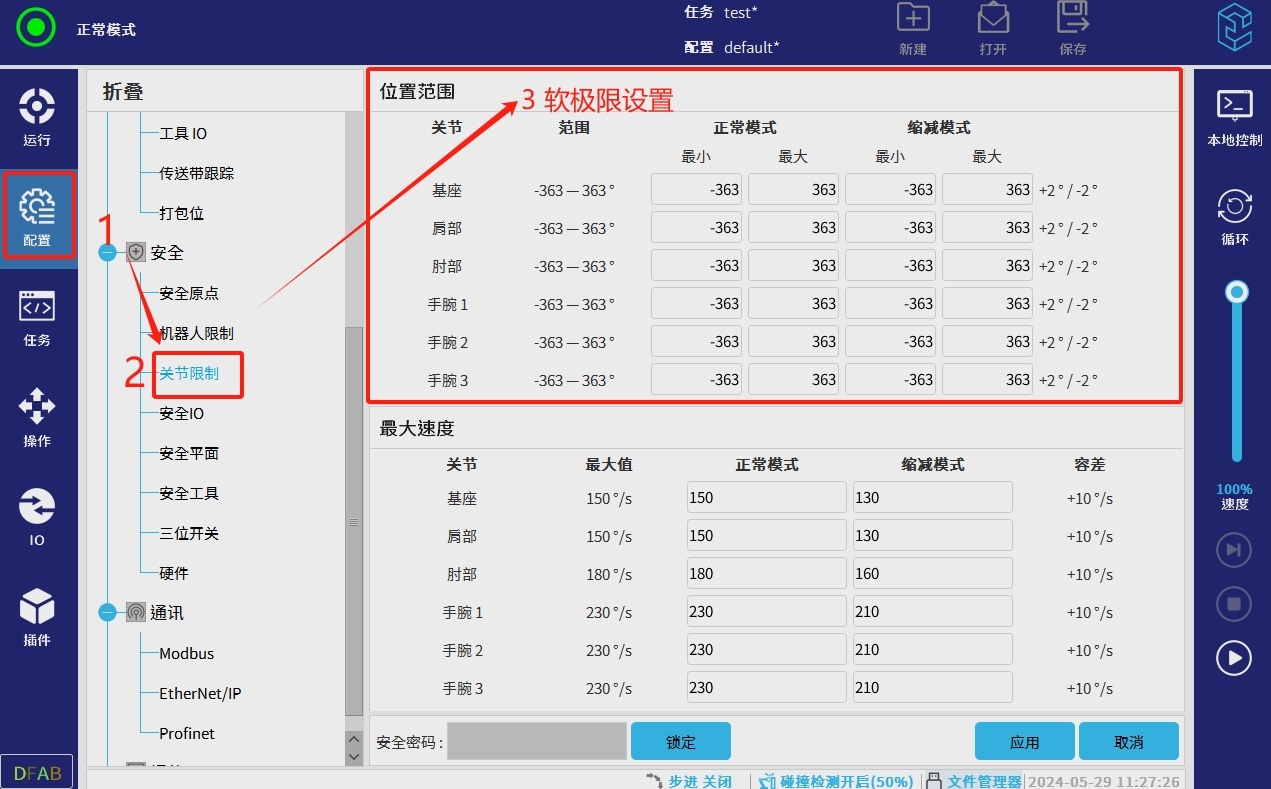
CS系列机械臂中,关节限制用来限制关节空间中每个机器人的关节运动范围和关节最大角度。
软限位是机械臂的各关节都可以正负旋转360度,但是3关节受限于自身结构限位,无法达到360度。3关节运行超过160度,腕关节会撞在1轴和2轴上面,调试人员须知。同时软限位还区分正常模式模式跟缩减模式下的范围和关节速度上限设定,不建议用户修改。
5 安全工具
5.1 功能介绍
安全工具是以工具tcp为圆心,设置一个半径为0-300mm虚拟安全球体,机械臂在运动过程中,如果这个虚拟球体表面接触到安全平面,会触发安全平面所设置的约束模式,最多可设置2个安全工具。
5.2 操作步骤
1. 我们在创建安全工具之前首先要建立好正确的TCP工具中心点,在配置-----TCP中创建新的tcp。如下图:

2. 建立好TCP后,我们就可以去创建安全工具了,步骤如图所示:


半径的距离是0-300mm之间。设置完成安全工具后一定要点击应用保存。点击应用的时候机械臂会下电,是正常的。

3. 设置好后我们可以看到机械臂的TCP工具中心点处会出现一个绿色的圆球,说明创建安全工具成功,如上图。之后我们就可以安全工具和上面所讲的安全平面一起配合使用了。机械臂安全工具球面碰到或者到达安全平面后,会触发安全平面所设置的约束模式。


























