
















CS机器人换机流程
1. 简介
在一些项目现场可能会因为各种各样的原因导致需要更换机器人本体或者控制柜以及两者都需要更换,本篇内容就是讲解更换机器人本体以及控制柜的操作步骤。
2. 操作流程
2.1更换机器人本体操作步骤(A为新本体,B为旧本体)
2.1.1备份B机器人的数据(作为备用以防万一,更换本体时一般用不到)
2.1.1.1将u盘插入示教器或者控制柜的USB接口,然后如图-1所示,点击艾利特 图标→设置,就会进入图-2界面。

图-1
2.1.1.2进入图-2界面后,点击备份→选择路径,就可以进入图-3界面
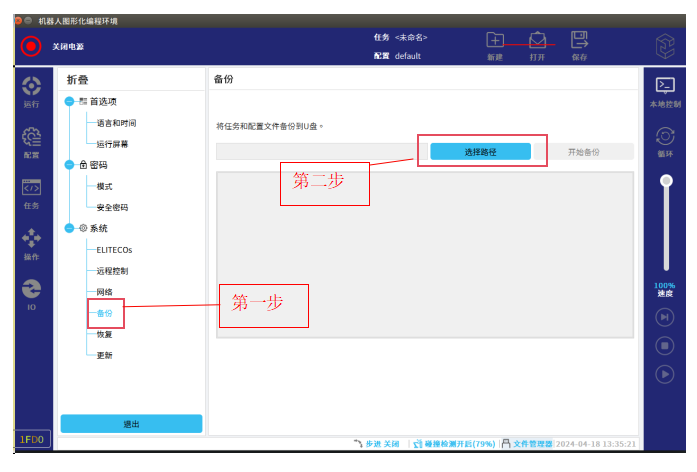
图-2
2.1.1.3进入图-3界面后,第一步选择备份文件地址为U盘,第二步在u盘 里新建一 个文件夹。就会出现图-4界面。
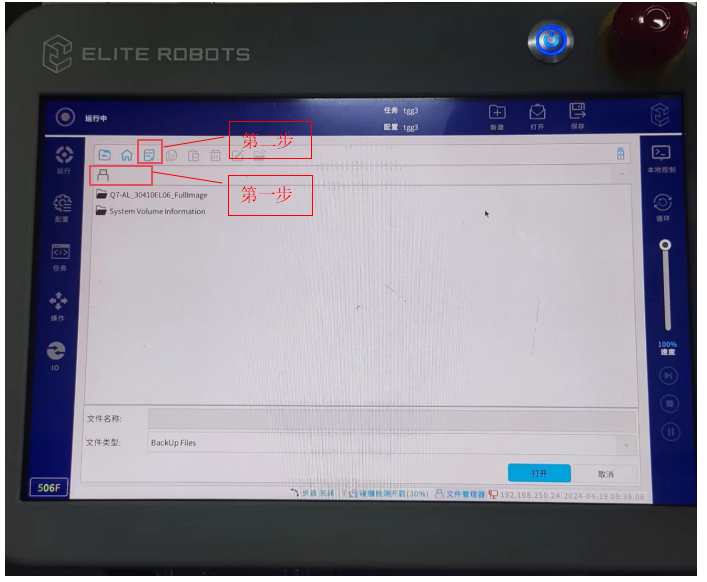
图-3
2.1.1.4进入图-4界面就可以看到新建的NewFolder文件夹(这是默认的 名称) 可以按照第一步操作,点击修改按钮就可以修改文件夹名称,修改完文件 夹名称后就点击第二步“打开”按钮,就可以进入图-5界面。
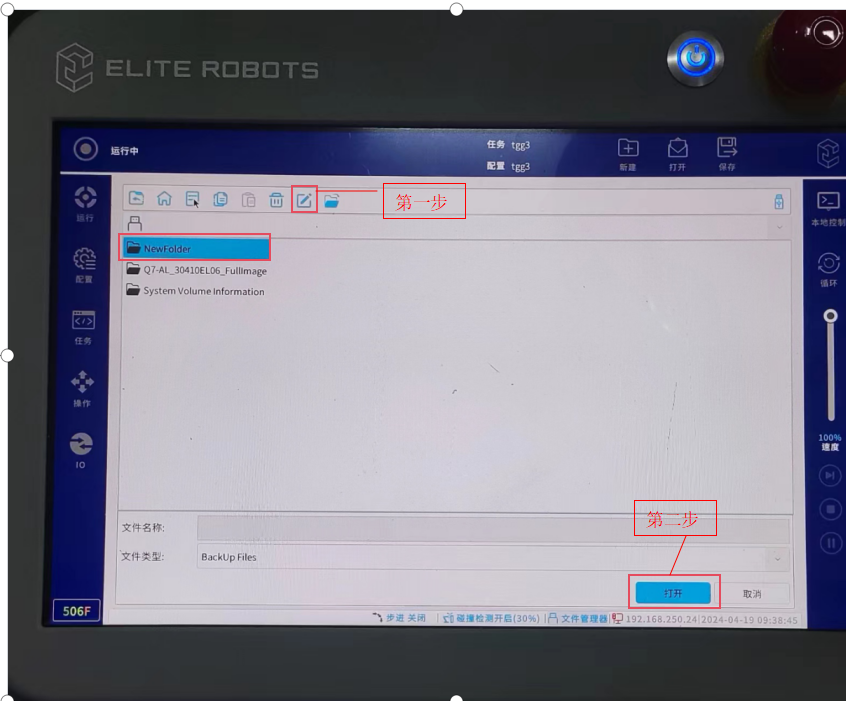
图-4
2.1.1.5进入图-5后,点击“开始备份”按钮,等待备份完成即可。备份完成后会出 现图-6界面,这时就可以拔出U盘了。
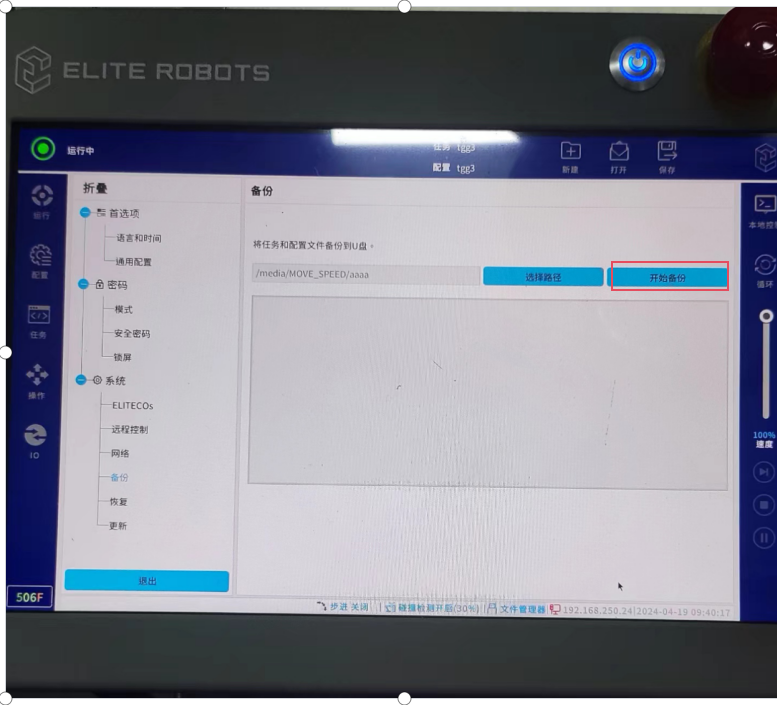
图-5
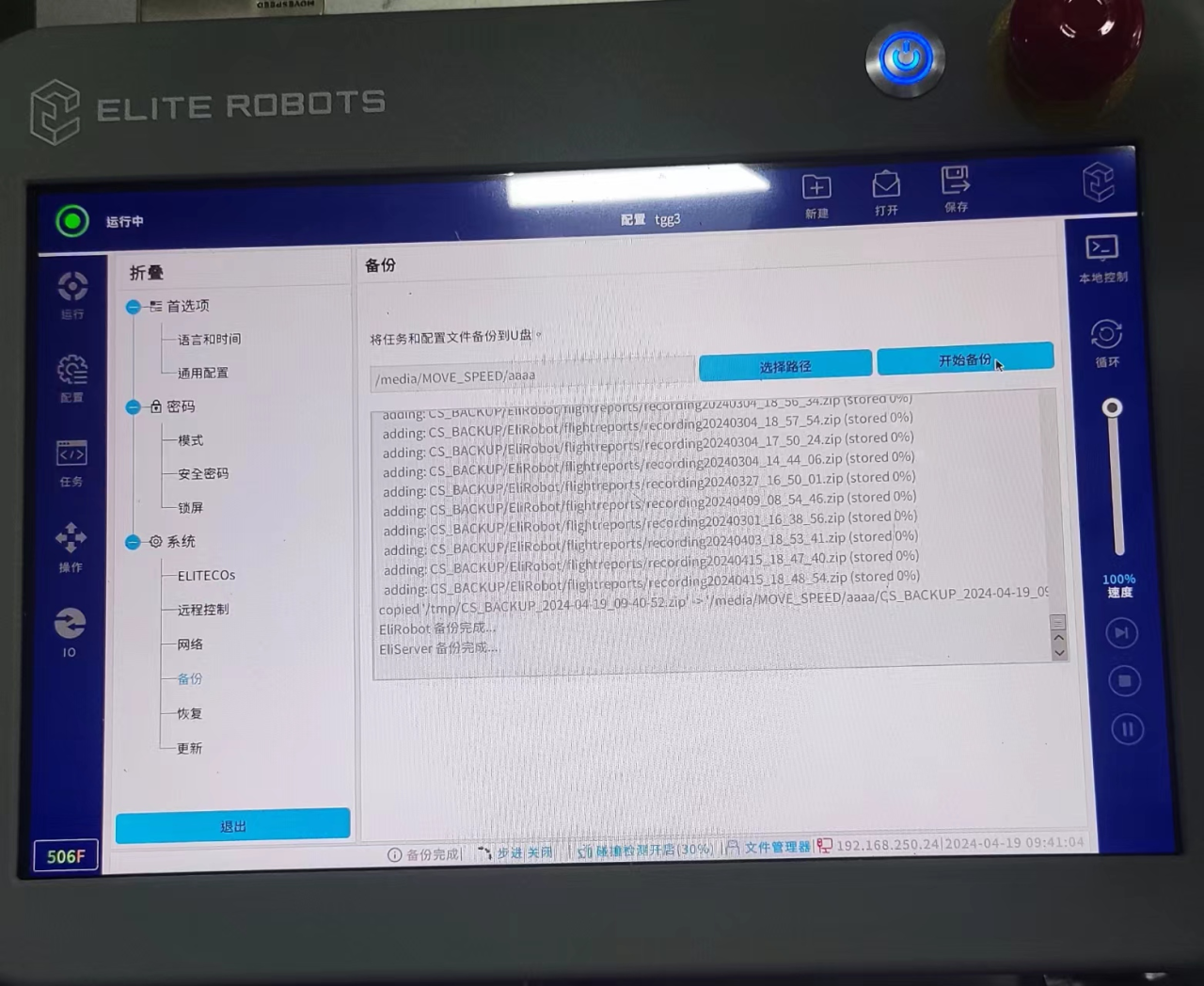
图-6
2.1.2将机器人移动到打包位
2.1.2.1拆除机器人末端上的工具,比如电动批头,点胶枪,相机等工具
2.1.2.2按图-7步骤操作将机器人运动到打包位。操作完第四步后就会出现图-8,然 后一直长按“自动移动”按钮(要保证机器人在运动过程中不会有干涉)直到 机器人回到打包位,如图-9所示。
2.1.2.3拔除机器人与控制柜之间的连接线缆,然后将机器人放置机器人包装箱里, 在包装箱表面写上维修单号,等待运输回厂。

图-7

图-8
图-9
2.1.3安装新本体
2.1.3.1点击图-10右上角红框标注区域(连续快速点击 5-8 次)就会出现图-11界 面,然后输入密码:elibot,就可以进入图-12界面。
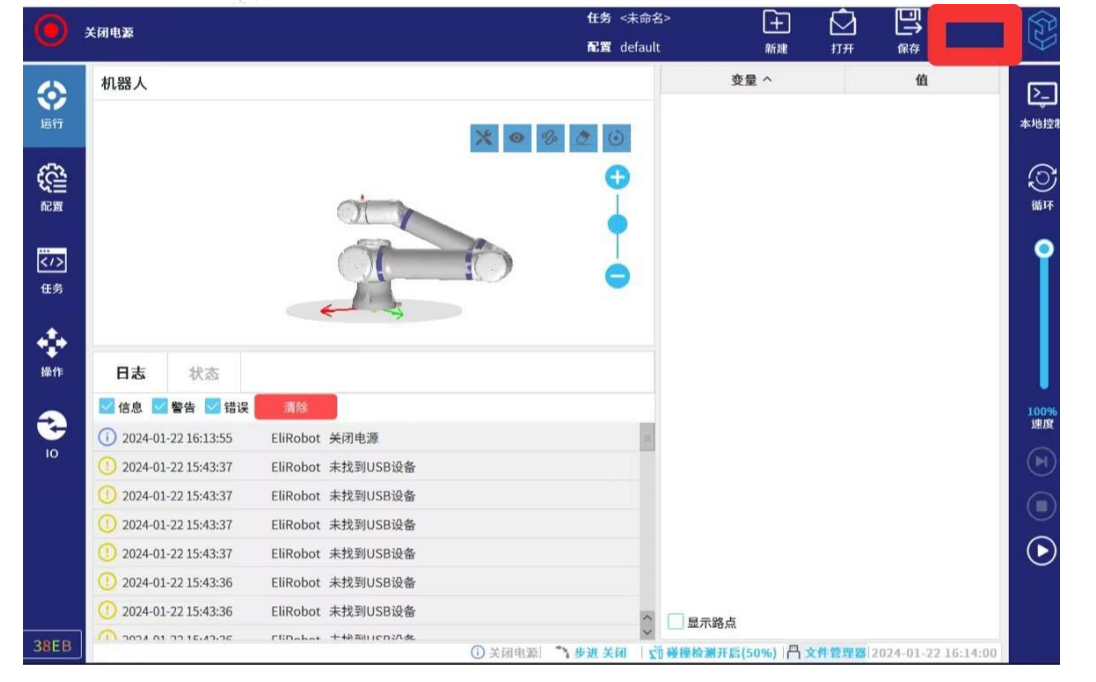
图-10

图-11
2.1.3.2进入图-12界面后按照图-12步骤进行绑定机器人序列号操作.
第一步:选择序列号重新绑定功能。
第二步:选择机器人型号,图-12中选择的是CS612,实际项目中选择实际的机器人型号 (机器人一轴以及控制柜都贴了铭牌,铭牌上有机器人型号信息)
第三步:输入机器人序列号。(机器人一轴以及控制柜都贴了铭牌,铭牌上有机器人 序列号)
第四步:点击“重新绑定”按钮,等待绑定完成自动重启即可。

图-12
2.1.3.3重启完成后更新机器人DH参数
第一步:将A本体的出厂备份文件存放在 U盘,将U盘插入示教器USB口。(出厂备份 文件请咨询艾利特技术提供)
第二步:按照图-13红框所示点击右上角深蓝色空白区域(连续快速点击5-8次),输入 密码"elibot"进入专家模式。

图-13
第三步:按照图-14界面操作步骤所示,调试>数据迁移>选择数据文件(U盘找到A 本体的出厂备份文件)>点击恢复数据>点击确定等待重启。
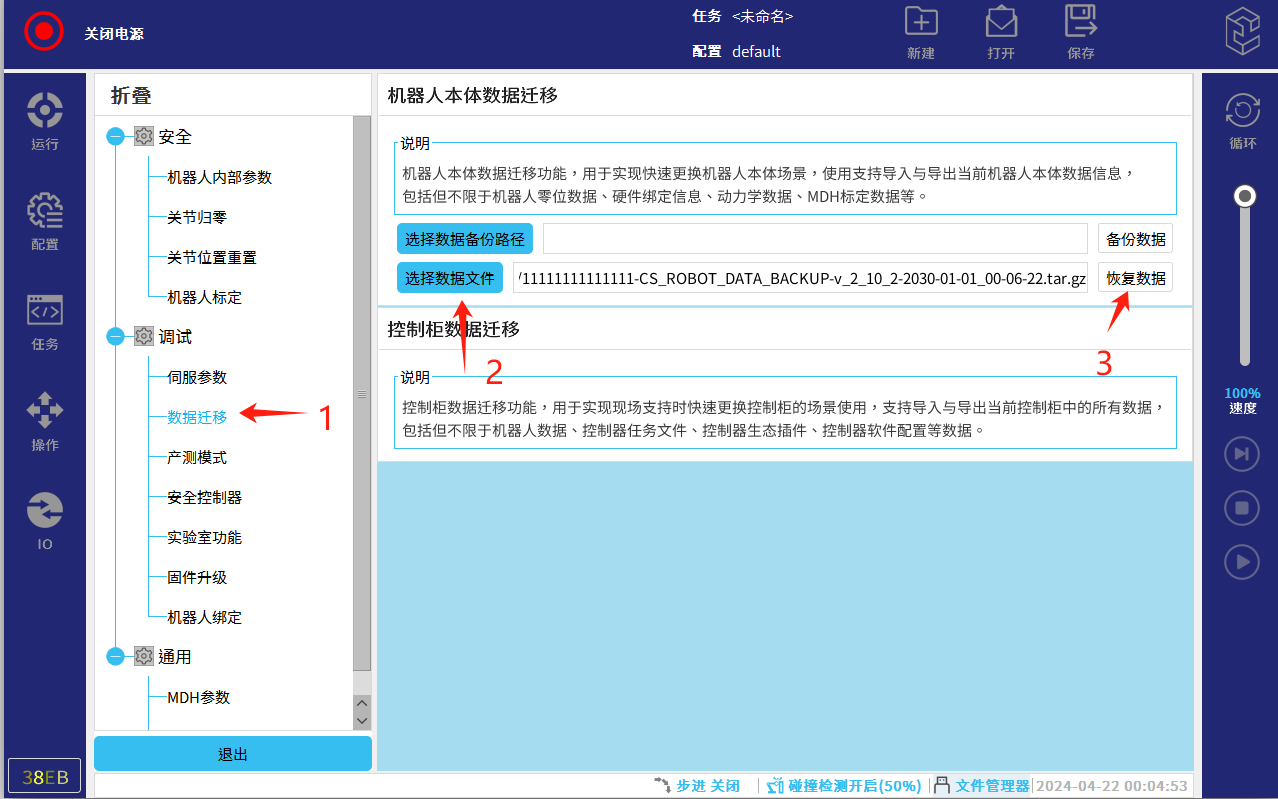
图-14
2.2更换机器人控制柜操作步骤(A为新控制柜,B为旧控制柜)
2.2.1按照2.1.1的操作步骤备份B控制柜的数据
2.2.2拔除B控制柜与机器人本体的连接线缆以及与其他外部设备连接的IO 信号线缆,将B控制柜放入原厂纸箱中并在纸箱表面写上维修单号。
2.2.3安装A控制柜,将机器人本体与控制柜之间的连接线缆以及控制柜 与其他外部设备的连接线缆连接起来。
2.2.4进入图-15界面后按照图-15步骤进行机器人序列号绑定操作。
第一步:选择序列号重新绑定功能。
第二步:选择机器人型号,图-15中选择的是CS612,实际项目中选择实际的机器人型号 (机器人一轴以及控制柜都贴了铭牌,铭牌上有机器人型号信息)
第三步:输入机器人序列号。(机器人一轴以及控制柜都贴了铭牌,铭牌上有机器人 序列号)
第四步:点击“重新绑定”按钮,等待绑定完成自动重启即可。
图-15
2.2.5导入备份程序文件
2.2.5.1将U盘插入A控制柜上示教器的USB接口。按图-16所示步骤操作进入到设置 界面。

图-16
2.2.5.2按图-17所示操作步骤,系统>恢复>选择文件(U盘找到B控制柜备份程序文 件)>点击打开>开始恢复。

图-17
2.2.5.3按照图-18所示,勾选恢复机器人零位、DH标定等数据>确定,等待恢复备份 完成重启即可。
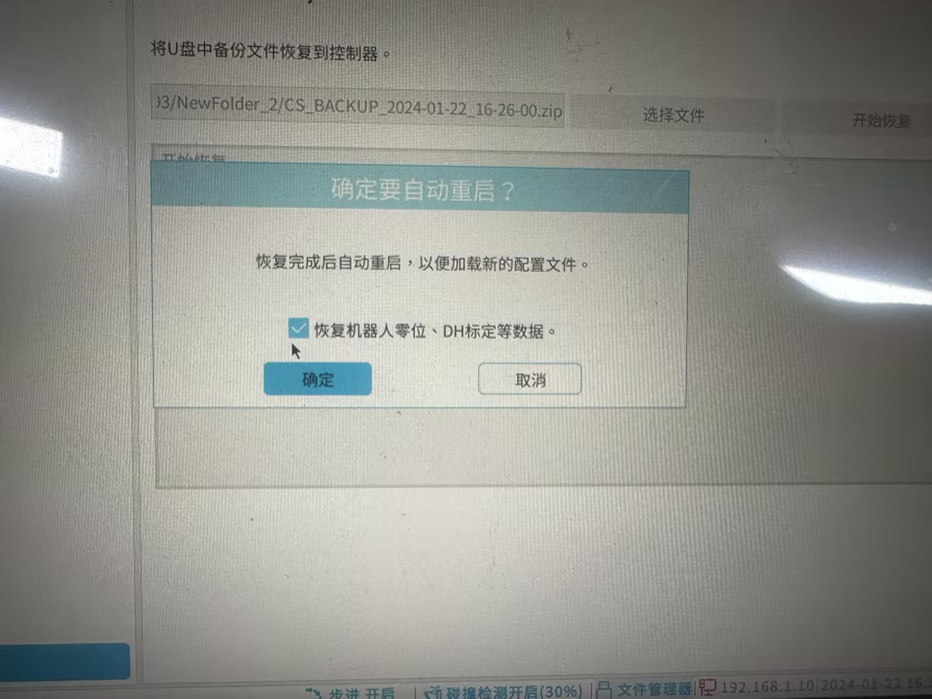
图-18
2.3更换机器人本体与控制柜(A为新机器人,B为旧机器人)
2.3.1按照2.1.1操作步骤备份B机器人的程序文件。
2.3.2拆除B机器人本体末端上的工具和控制柜与外部设备连接的线缆。
2.3.3按照2.1.2操作步骤将B机器人移至打包位,将B机器人本体与控制柜都 放入原装纸箱中并在纸箱表面写上维修单号。
2.3.4安装A机器人本体以及控制柜。
2.3.5导入B机器人的备份程序文件:
2.3.5.1将U盘插入A控制柜上示教器的USB接口。按图-19所示步骤操作进入到设置 界面。
图-19
2.3.5.2按图-20所示操作步骤,系统>恢复>选择文件(U盘找到B控制柜备份程序文 件)>点击打开>开始恢复。
图-20
2.3.5.3按照图-21所示,不勾选恢复机器人零位、DH标定等数据>确定,等待恢复完 成即可。
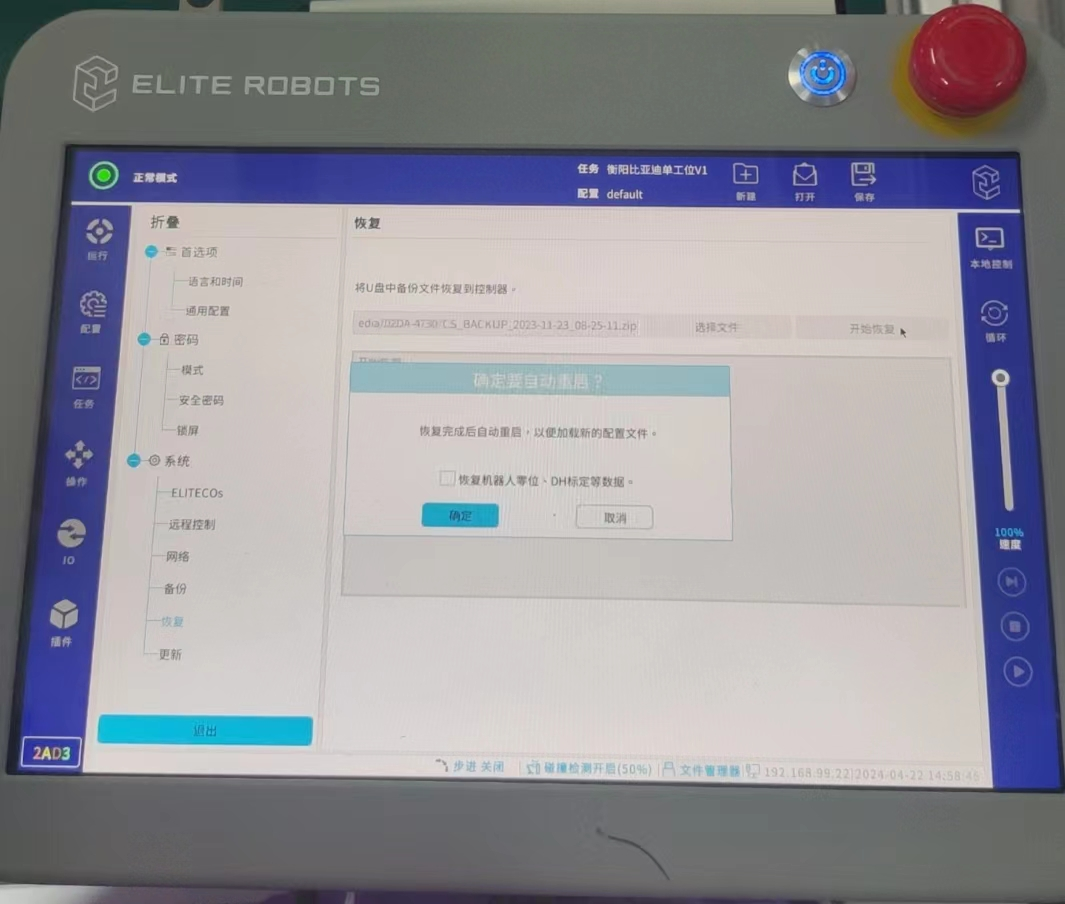
图-21
3. 常见问题解答
3.1如何解决更换完控制柜或者机器人本体后出现的套圈问题
3.1.1确定套圈的轴是哪一个轴或者哪几个轴。让机器人运动到一个安全点,然后对比机器人的实际位置与安全点位置的关节数据,比如安全点的一关节的关节数据为100度,但是看机器人的实际一 关节数据为460度,这就说明多加了360度,我们在专家模式→关节重 置里给一关节减“1”即可(相当于一圈360度)。
3.1.2点击图-22右上角红框标注区域(连续快速点击 5-8 次)就会出现图-23界面,然后输入密码:elibot,就可以进入图-24界面。
图-22
图-23
3.1.3按照图-24操作步骤进行操作
第一步:点击关节位置重置
第二步:选择套圈的关节
第三步:选择加“1”或者减“1”
第四步:点击关节位置重置按钮即可,然后退出专家模式。

图-24
3.2如何解决更换完本体或者控制柜后机器人无法对齐的问题
因为没有导入机器人本体零点数据,这时按照2.1.3.3中的操作步骤更新零点数据即可。


























