
















CS机器人防护停止和急停信号接线
1. 简介
所有安全 IO 成对存在(冗余), 必须保留成两个独立的分支。单一故障不会导致丧失安全功能。固定的输入有两个。
紧急停止输入仅用于紧急停止设备。
防护停止输入可用于所有类型的安全型保护设备。用户也可以使用可配置的 IO 设置紧急停止输出等其他安全 IO 功能。
2.急停说明
急停,机器人会进入急停状态,电机进入抱闸和下电状态,只有当急停回路恢复接通后,才能上电和松开抱闸。
3.防护重置说明
防护停止,是属于暂停机器人,机器人不会下电恢复后可接着运行,接线到外部安全门/光栅。不配置防护重置/自动模式防护重置时,当防护停止断开时,机器人程序立刻暂停运行。
恢复连接时,机器人接着运行。
防护停止有三种使用方式:
1. 不配置防护重置或者自动模式防护重置(机器人在所有模式下都生效,断开防护停止回路,机器人立刻暂停运行,接通即恢复运行)
2. 仅配置防护重置(机器人所有模式下都生效,需要外接防护重置按钮恢复启动)
3. 仅配置自动模式防护重置按钮(只在自动模式下生效,需要外接防护重置按钮恢复启动)
当配置了防护重置时,需要两个步骤才能恢复运行。
1. 防护停止回路接通。
2. 人员撤离到安全区域后,接通防护重置按钮。
自动模式防护重置只在自动模式下才需要接通重置按钮恢复运行。
4. 接线图
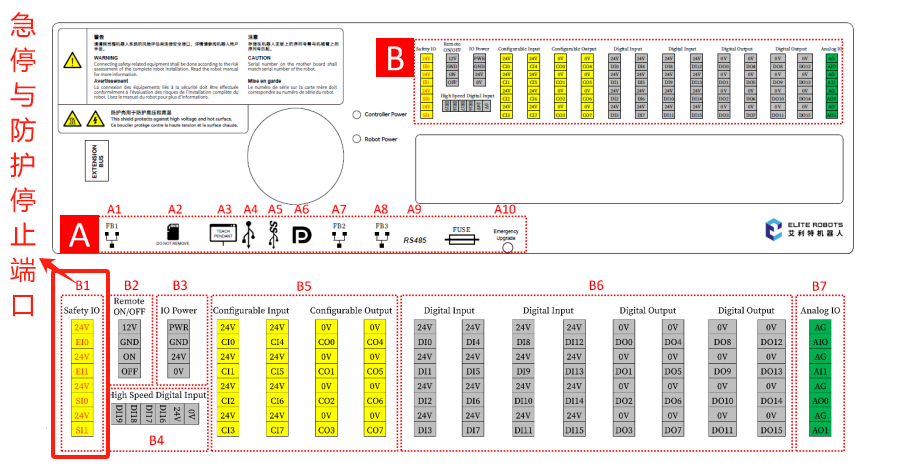
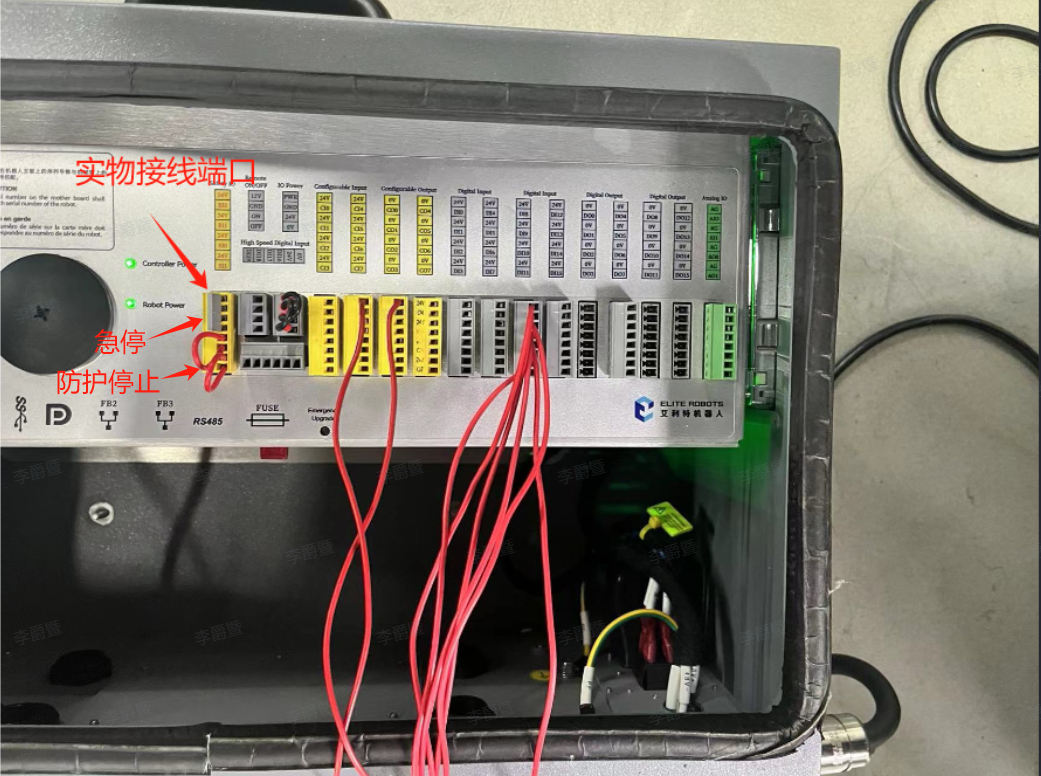
4.1 控制柜端口介绍
急停与防护停止都是双通道回路,使用时要注意。
EI0-EI1是急停的两个接口,SI0-SI1是防护停止的两个接口。
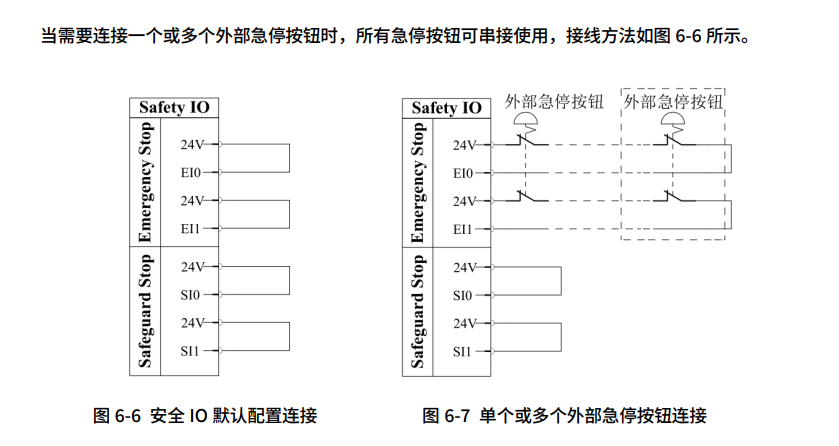
4.2 急停接线图
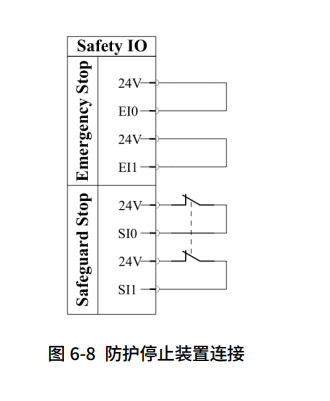
4.3 防护停止接线图
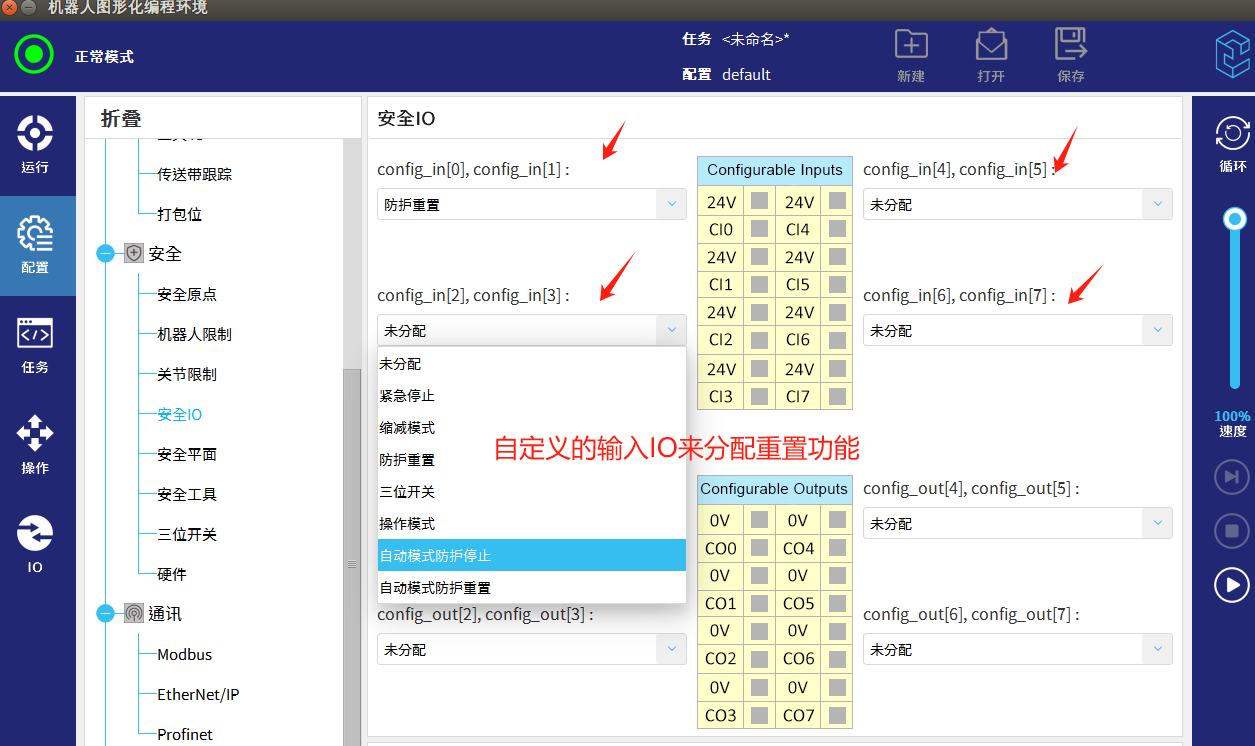
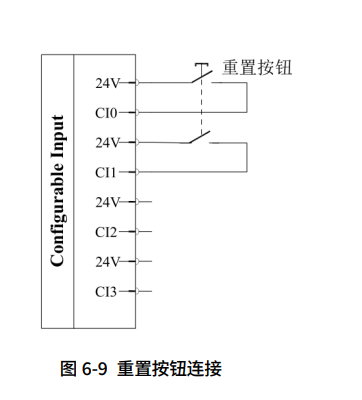
4.4 防护重置功能配置与接线图
自定义安全IO输入端口为防护重置按钮,配置完成在使用对应的端口接线即可。
5. 常见问题解答
5.1防护重置,在手动/自动模式下都需要接通防护停止通道后,在接通防护重置,机器人才能恢复运行。
5.2自动模式防护重置仅在自动模式下才生效。
5.3急停与防护停止都是双通道,出现只接通一路时会触发安全违规报警。


























