CS机器人模式功能介绍
1. 简介
本文主要介绍CS机器人的三种模式以及功能介绍,本地模式以及远程模式,本地模式又分为手动模式以及自动模式
2. 模式介绍及说明
2.1手动模式
手动模式即机器人需要用示教器来控制机器人的移动,一般用于调试阶段,进行点位示教以及流程验证
2.2自动模式
2.21.自动模式的介绍
自动模式即可以根据所编辑的树状图程序自动运行
2.2.2如何打开自动模式
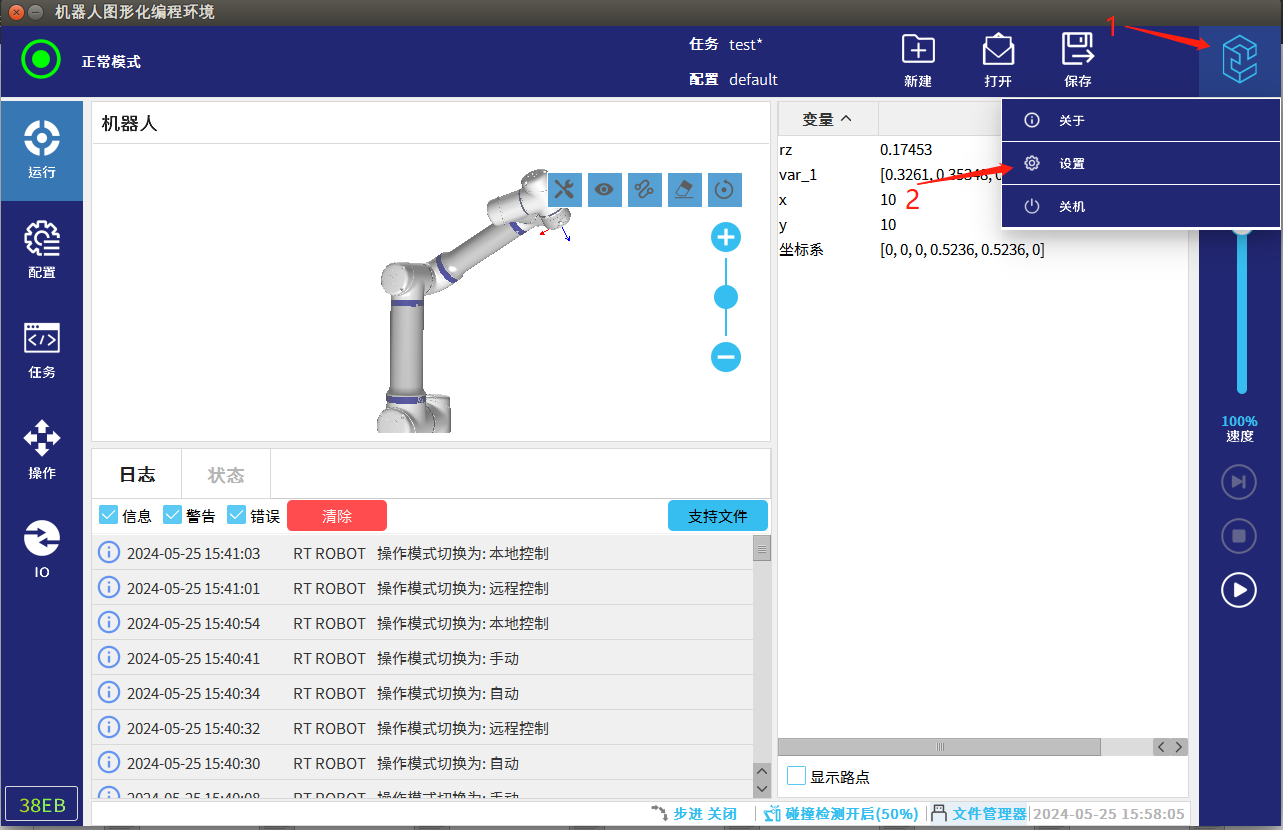
首先点击右上角的ELITE图标,然后点击设置
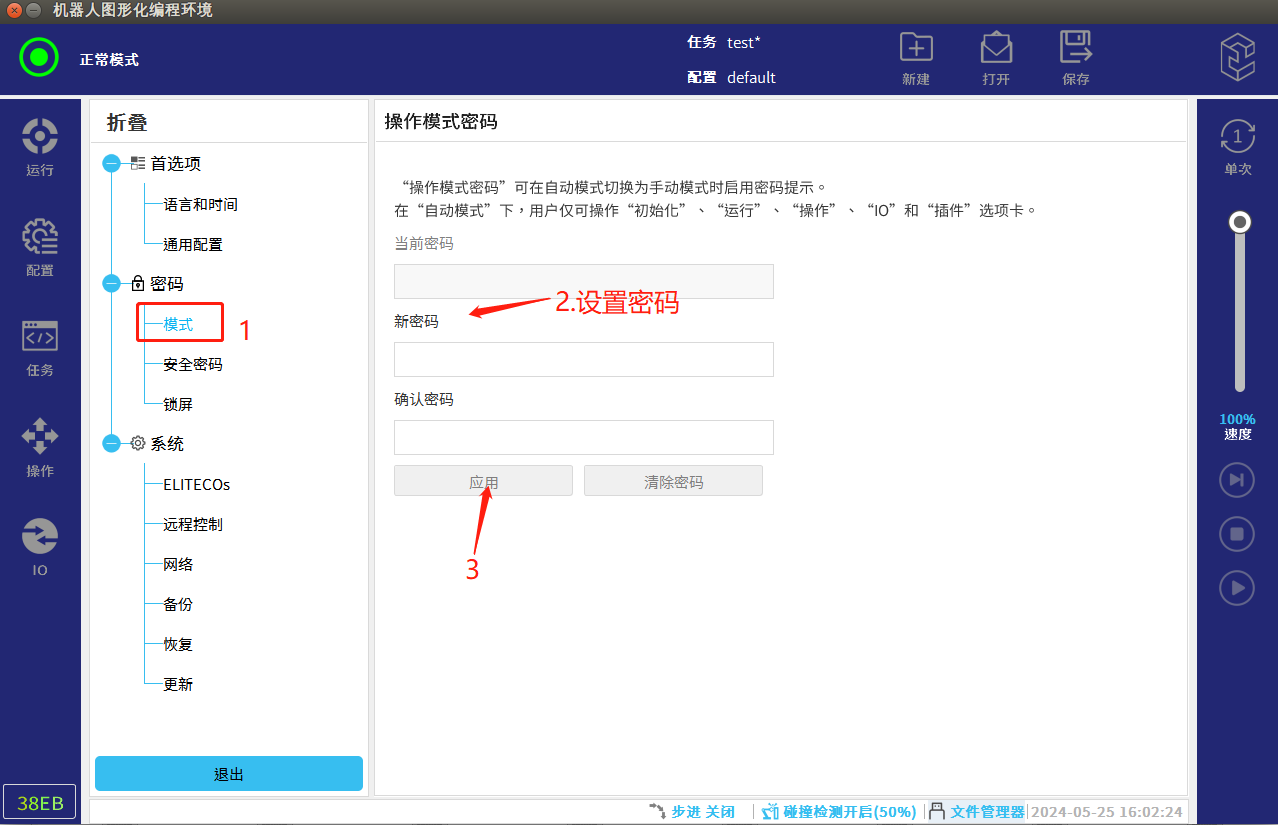
进入到下图界面后首先点击模式,然后设置密码,点击应用然后退出当前界面即可
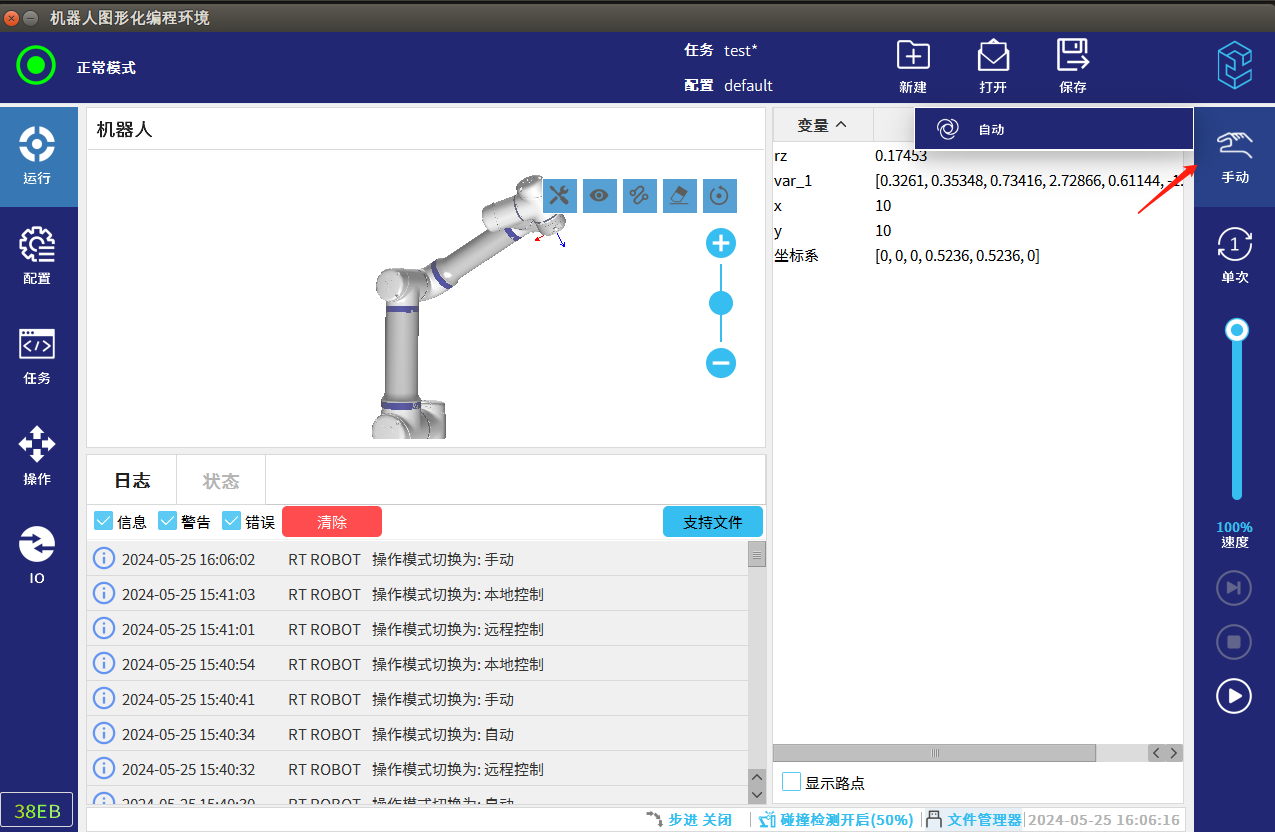
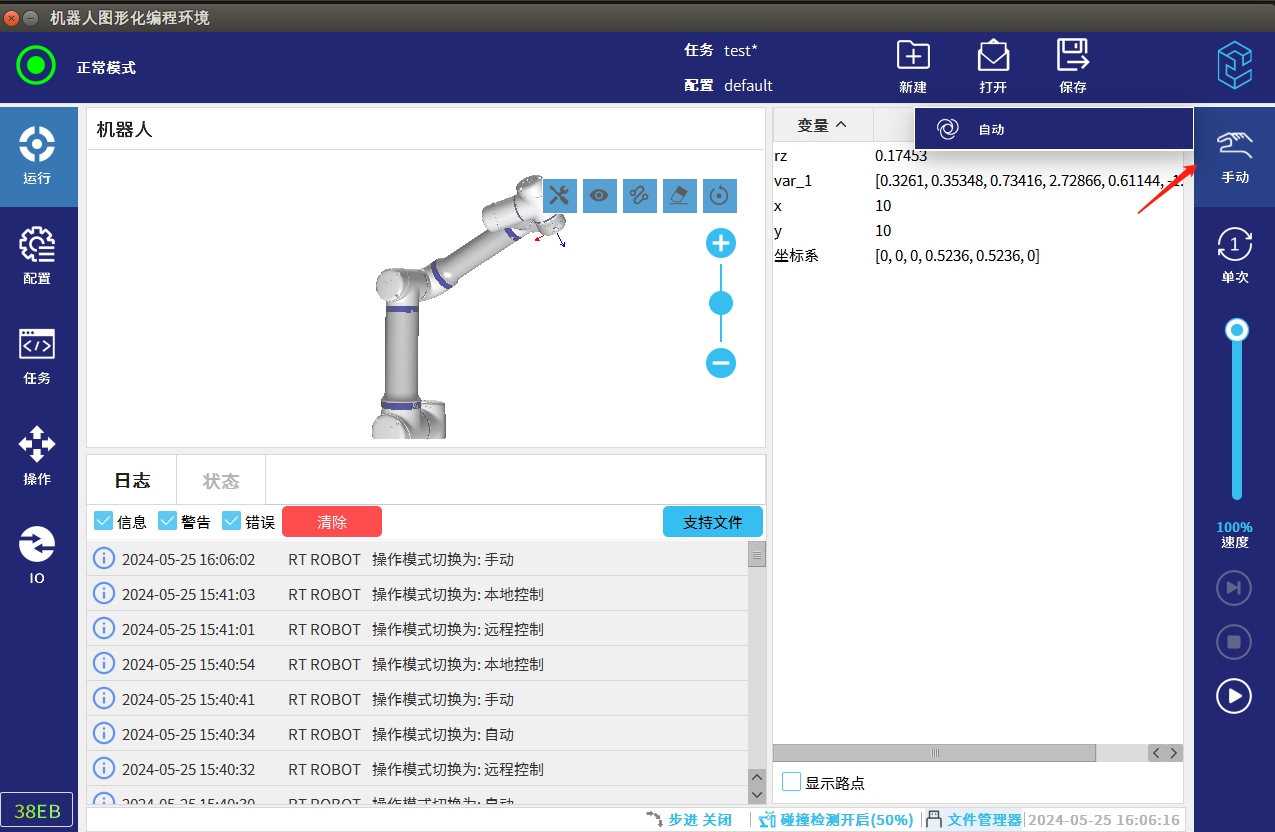
此时右上角多出来一个手动按钮,点击即可进行手动模式和自动模式的切换
切换成自动模式以后右边的速度滑块为灰色无法修改
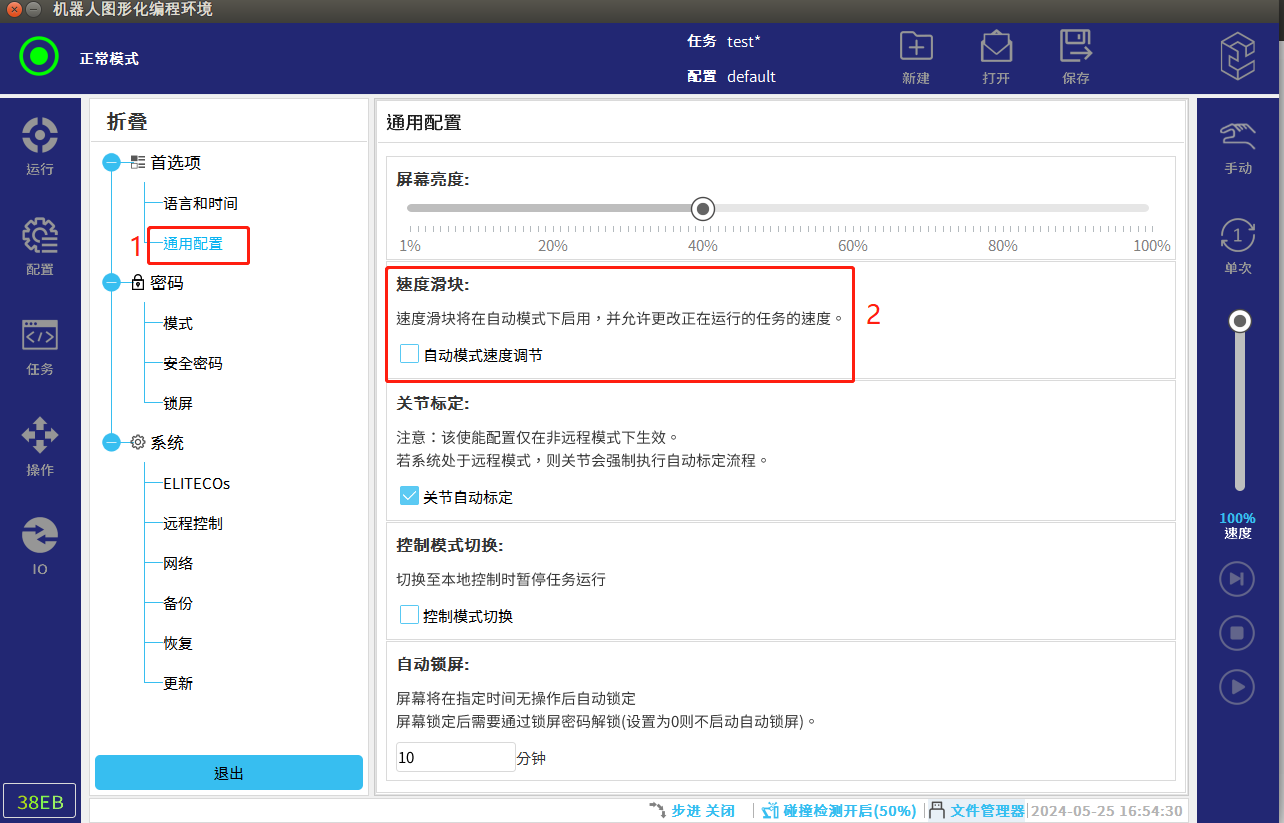
如果需要在自动模式下修改速度,则需要在设置模式的界面中选择通用配置,勾选自动模式速度调节,此时再切换成自动模式时,右边的速度滑块就可以进行速度调节
2.3远程模式
2.3.1远程模式的介绍
远程模式即为可以通过远程控制器来控制机器人的运动,例如通过Modbus,Ethernet,Profinet等通讯远程控制实现机器人的运行
2.3.2如何打开远程模式
首先点击右上角的ELITE图标,然后点击设置
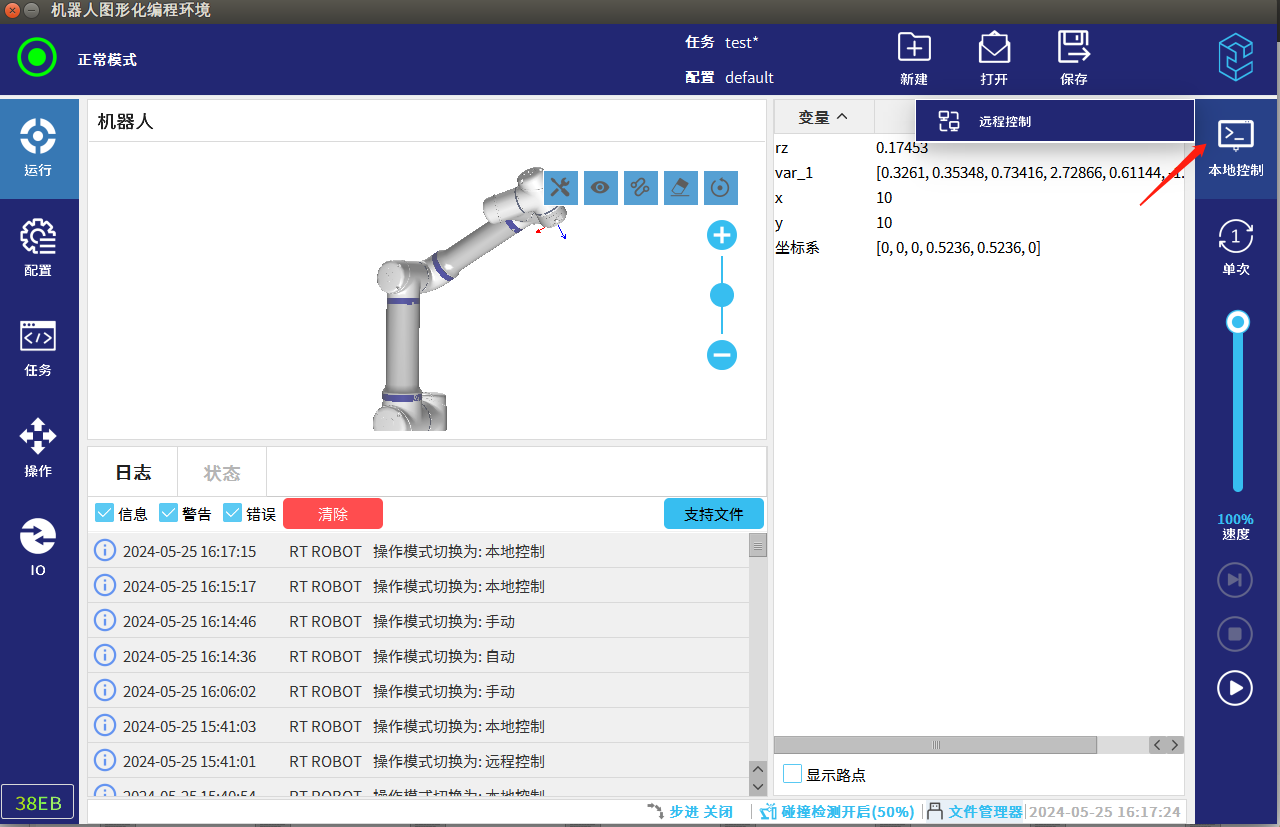
进入到下图界面点击远程控制,然后点击按钮切换为启用即可

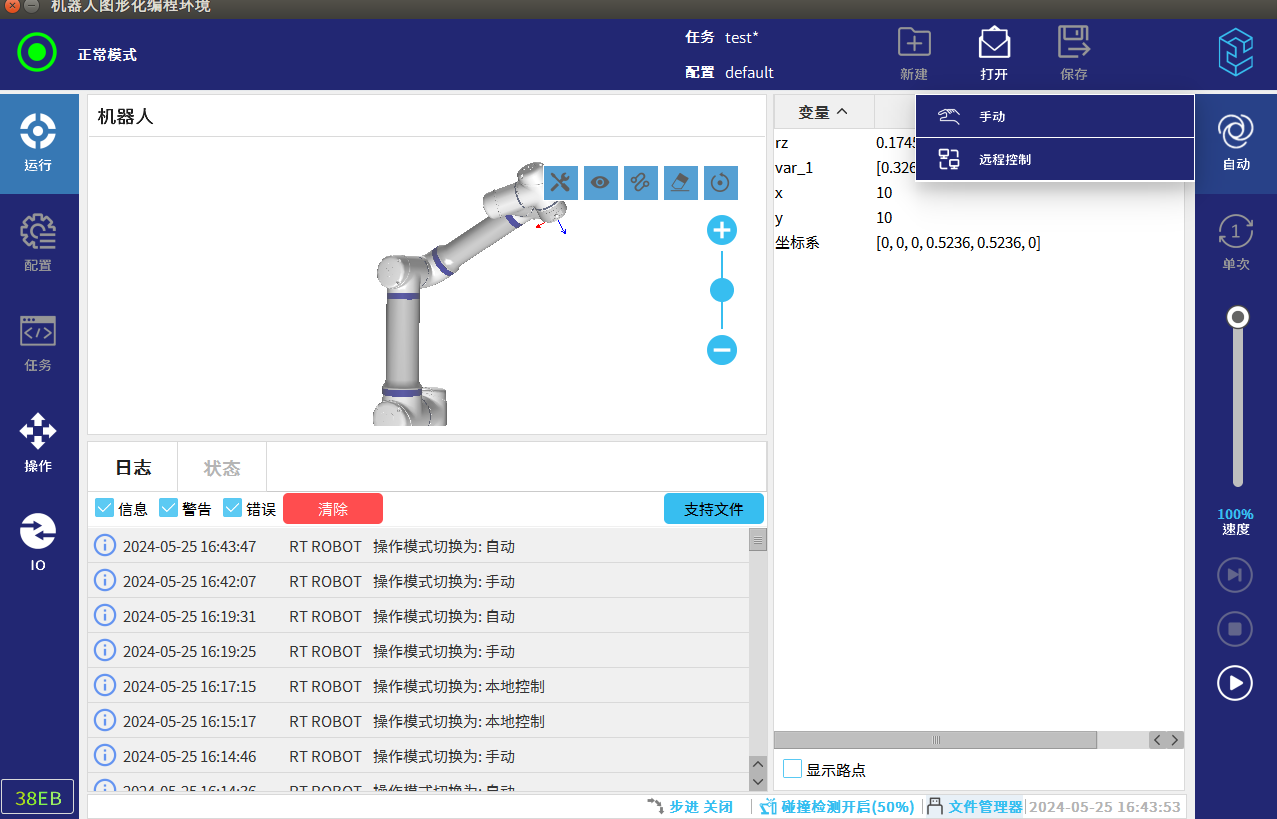
此时右上角多了一个本地控制按钮,点击即可进行本地控制(手动模式)和远程模式的切换
3. 常见问题解答
3.1手自动模式的切换
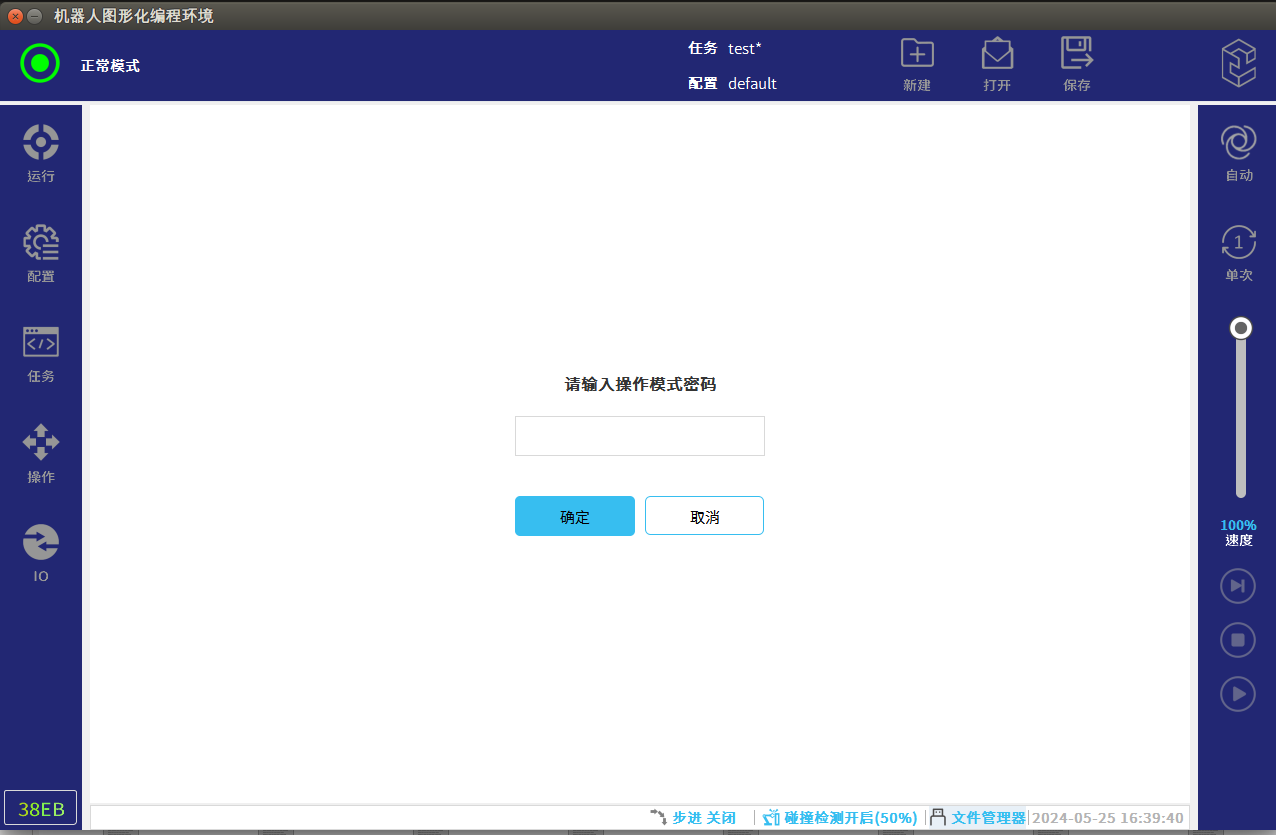
在手自动模式切换中,从自动模式切换成手动模式需要输入之前设置好的密码,所以密码一定要记住,如果忘记了可以联系ELITE机器人售后进行清除重新设置
3.2手动模式,自动模式以及远程模式的切换
当自动模式以及远程模式都启用时,需要先切换成自动模式,再点击切换此时才能切换成远程模式,如下图所示
3.3手动模式切换成自动模式以及远程模式后的状态
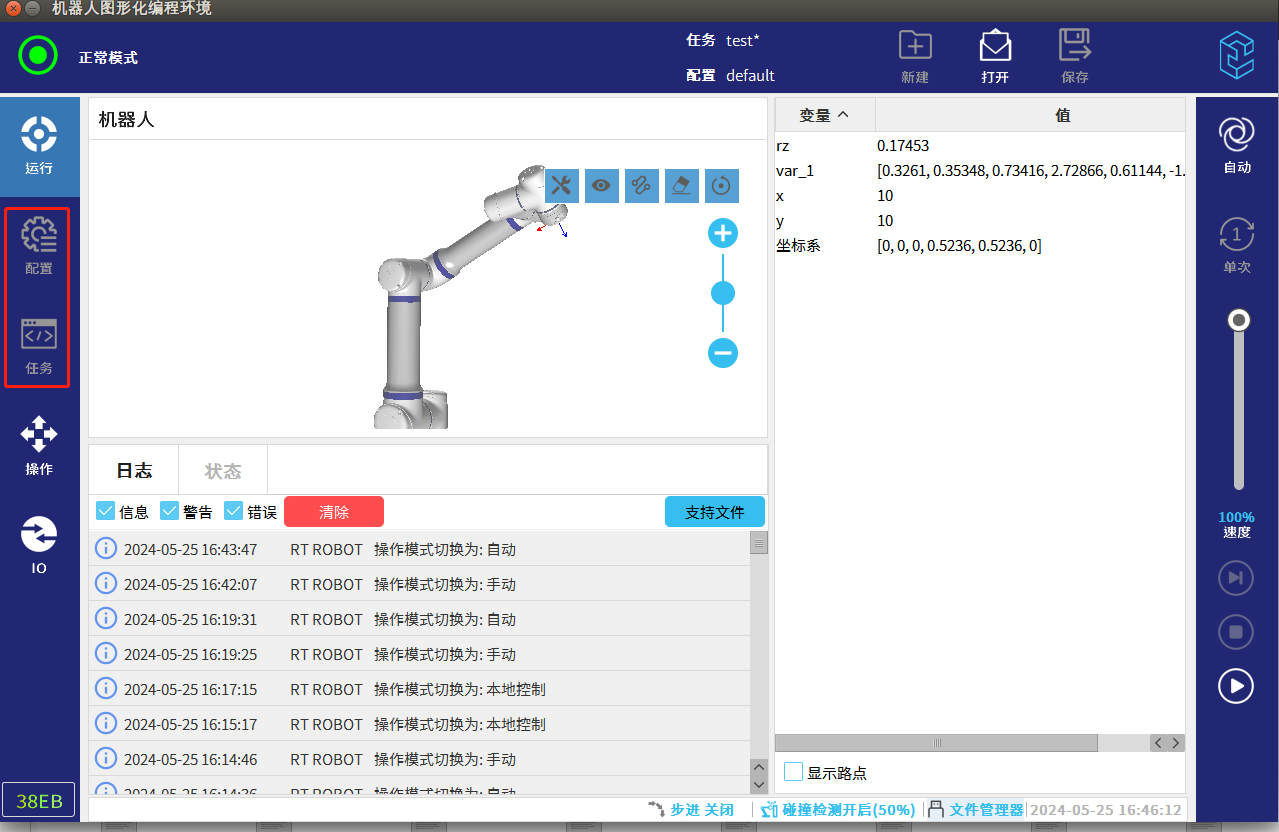
在切换成自动模式时,出于安全考虑是无法查看及修改机器人的程序以及配置状态的,如需修改则需要重新切换成手动模式
切换成远程模式时只能查看IO状态以及运行状态监控