EC机器人程序原点设置及信号输出
2024-11-04
1. 程序原点介绍
程序原点是程序的起始位置。它可以通过确保机器人从已知位置启动来防止对外围设备的干扰。
2. 操作流程
1. 机器人软件版本 v3.0之上
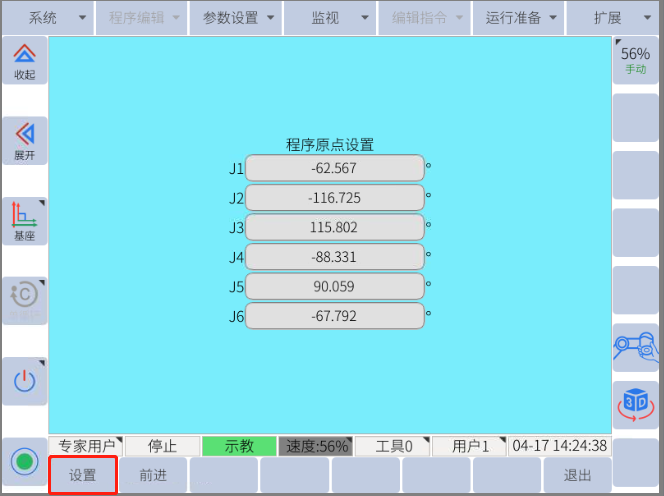
2. 将机器人移动到所需的程序起始位置。导航到运行准备 -> 零点设置 -> 程序原点,按“设置”按钮,将机器人当前位置设置为程序原点
当机器人位于程序原点位置时,虚拟输出 M401 的值为 1。程序原位可根据生产线要求设置使用。
3. 常见问题解答
3.1 程序中调用程序原点
打开程序,将机器人移动到所需的程序起始位置,使用移动指令(movj ,movl,movc等)记录当前点位。
3.2 程序原点信号使用数字io输出
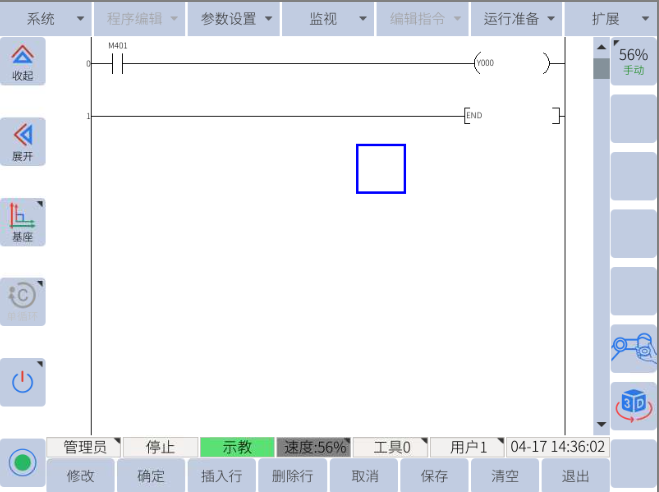
机器人进入管理员权限(密码:333333),导航到扩展 -> 用户PLC,使用梯形图关联M401和需要输出的数字IO
3.3 使用总线通讯读取程序原点状态
1. modbus协议:M401线圈地址0x191,使用 0x01,0x03,0x04功能码
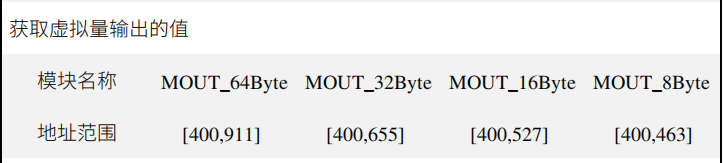
2. profinet协议:程序原点M401信号,可使用MOUT_64Byte,MOUT_32Byte,MOUT_16Byte,MOUT_8Byte模块
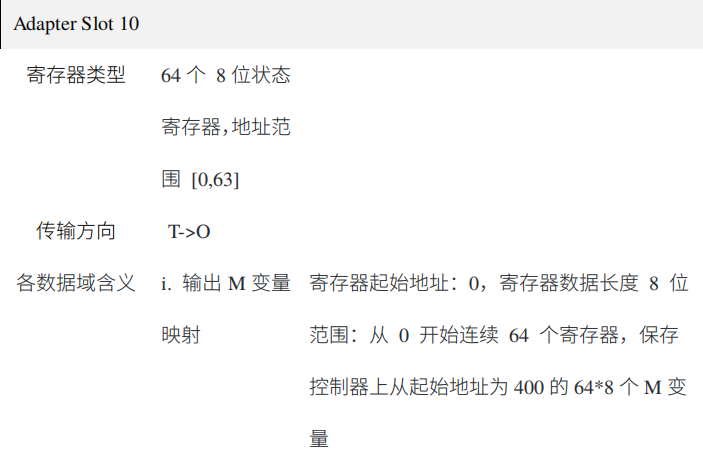
3. Ethernet/IP协议:程序原点M401信号,可读取Adapter Slot 10