
















CS机器人常用参数配置
1. 简介
在CS机器人中有很多常用参数需要我们去进行配置,比如安装方式,IP地址的设置,新建TCP,负载的设定,全局变量的设置,坐标系的建立,原点的设定,启动的设定,如何回打包位等等一些常用参数的配置。
2. 操作流程
2.1CS机器人的安装方式
CS机器人有正装,侧装,倒装三种安装方式,如图-1是正装,图-2是侧装,图-3是倒装,在这三种安装方式下都可以自定义设置机器人绕Z轴旋转的角度以及倾斜的角度,用户可以根据实际情况选择安装方式以及定义机器人绕Z轴旋转的角度和倾斜的角度。用户在安装完实体机器人后要在示教器“配置”→“通用”→“安装”中选择实际机器人的安装方式。

图-1

图-2

图-3
2.2CS机器人负载以及重心的设置,按照图-5所示操作步骤操作
第一步:点击“配置”,进入机器人参数配置界面
第二步:点击通用配置中的“负载”
第三步:添加一个新负载,如果只需要用到一个负载那么这一步可以省略
第四步:输入实际安装在机器人末端上工具的重量,这个重量不能相差太 多,如果你输入的重量低于实际重量,那么你按下机器人自由拖 动按钮后机器人三轴就会往下掉,因为机器人会根据你输入的重 量来输出一个往上的力,你输入的重量低于实际工具的重量所以 导致机器人输出的力不够;反之,如果你输入的重量大于实际工 具的重量,那么机器人三轴就会往上抬。
第五步:设置重心,默认重心是在机器人法兰盘中心,但是实际工作中末 端安装了工具那么重心位置肯定就发生了变化,那么我们就需要 根据实际情况在X,Y,Z三个方向进行偏移去移动重心的位置, X,Y,Z三个方向参考机器人法兰坐标系,在机器人“配置”→“负载 ”→”负载可视化“,如图-4红框所示即为机器人法兰坐标系。以 机器人末端R485通讯接口为参考,指向R485通讯接口的为Y的负 方向,以Y的负方向为参考顺时针旋转90度为X的负方向,以Y的 负方向为参考逆时针旋转90度为X的正方向,以Y的负方向为参考 顺时针旋转180度为Y的正方向,与机器人末端垂直且指向外的方 向为Z的正方向,与机器人末端垂直且指向里的方向为Z的负方向。

图-4
第六步:当机器人质量和重心设置好后点击“立即设置”按钮即可,这样机 器人的负载以及重心就设置好了。
第七步:按下示教器顶部自由拖动按钮,机器人末端三色灯亮蓝灯且机器 人没有动或者有一点微动那就说明负载以及重心就设置正确;如 果机器人往下掉或者往上抬那就说明质量没有设置正确,如果机 器人往X,Y,Z三个方向的某一个方向偏那就说明重心没有设置正确。

2.3CS机器人IP的设置,如图-6和图-7所示步骤操作
第一步:点击艾利特机器人图标
第二步:点击设置,进入到图-7界面
第三步:点击“网络”
第四步:选择“静态地址”,使用FB1网口就设置FB1网络,使用FB2网口就 设置FB2网络
第五步:设置IP地址以及子网掩码,机器人的IP地址要与需要连接的外部 设备在同一个网段,也就是前三段数字要一样;子网掩码为 “255.255.255.0”
第六步:点击“应用”即可

图-6

图-7
2.4CS机器人机械零点确定
2.4.1将机器人移至机器人默认零位,如图-8操作步骤所示
第一步:点击”配置"
第二步:点击“原点”
第三步:点击“零位”
第四步:点击“移至此处”,就会出现图-9界面
第五步:在图-9界面中一直长按“自由移动”按钮,等待机器人回到零位,如果机器人 能正确的回到图-10姿态,说明机器人零位正确,反之说明机器人零位错误; 如果机器人零位不对了就要按照2.4.3操作步骤对机器人进行机器人标定
图-8

图-9
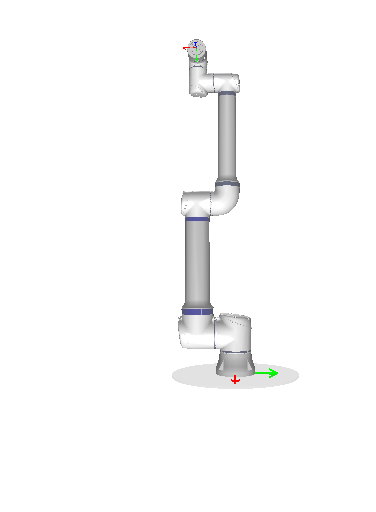
图-10
2.4.2使用机器人对齐功能确定机器人零位,如图-11操作步骤所示
第一步:点击“操作”
第二步:将坐标系选择“基座”
第三步:点击“对齐”,就会出现图-11界面
第四步:在图-12界面中长按”自由移动“按钮,等待机器人末端与地面垂直即可;如果 机器人与地面垂直了即图-13的姿态说明机器人零位没有问题,反之说明机器 人零位不对,如果机器人零位不对了就要按照2.4.3操作步骤对机器人进行机 器人标定
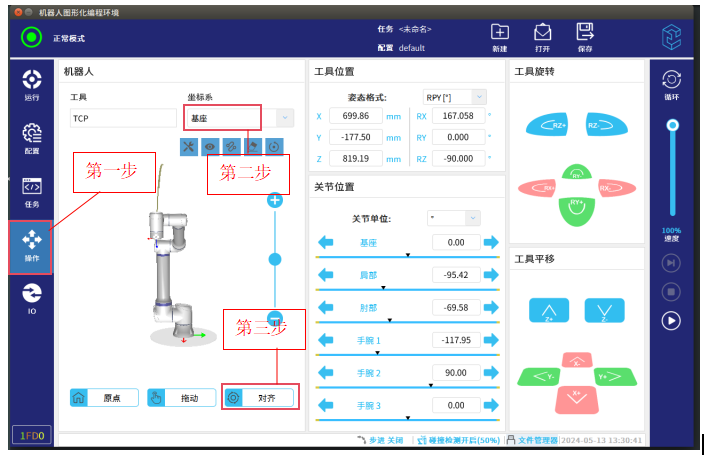
图-11

图-12
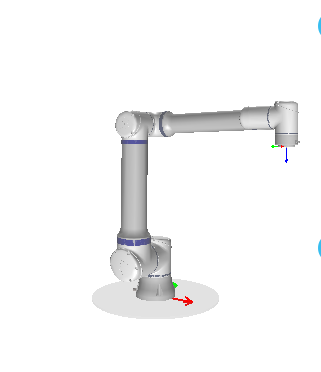
图-13
2.4.3机器人零点的标定
第一步:在机器人末端以及与机器人末端垂直的面上安装一个末端是尖的圆柱体工 具,类似与牙签一样形状的工具
第二步:进入机器人专家模式,在图-14红框标记处连续点击5-8次,出现图-15画面, 然后输入密码”elibot"就可以进入专家模式
图-14
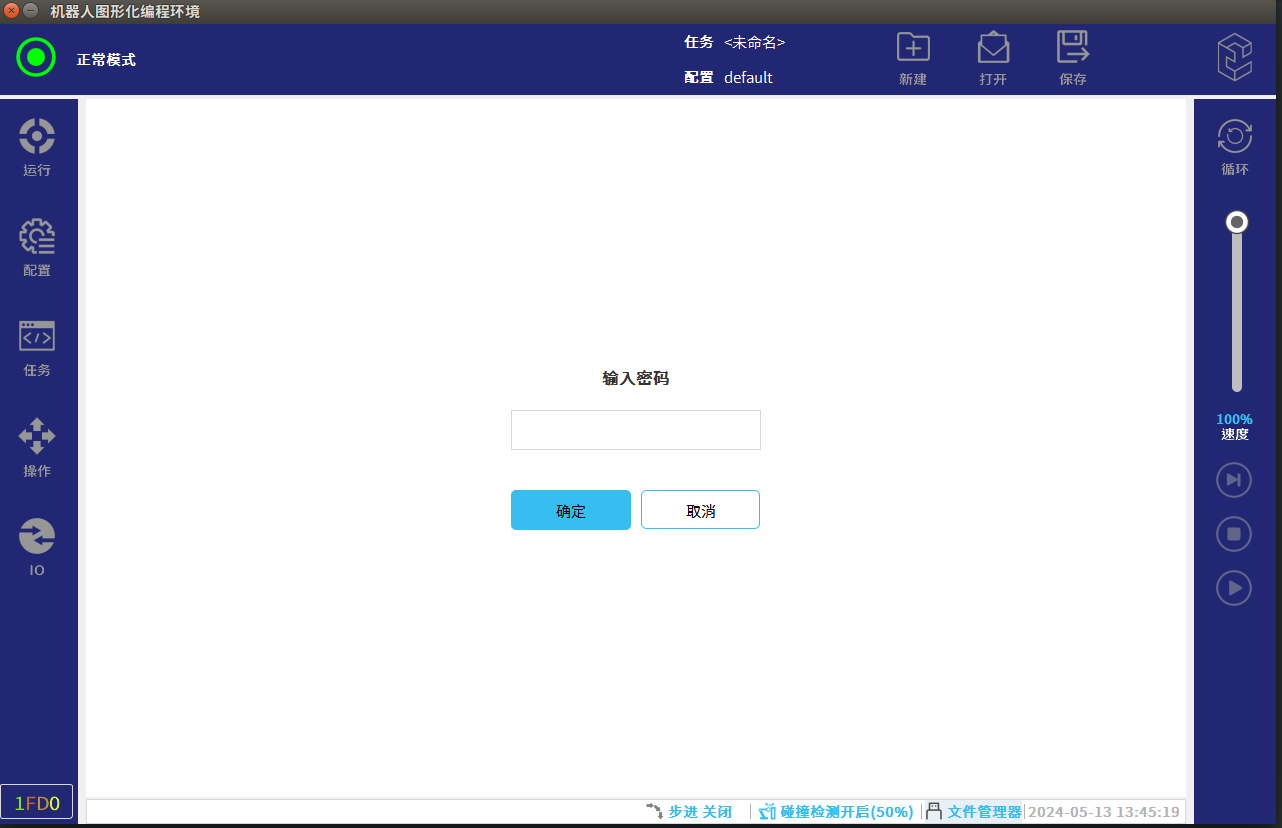
图-15
第三步:进入图-16界面,按照图示步骤进行标定操作;机器人标定零点时需要标定20 个点,就是要使机器人以20个不同的姿态用机器人末端安装的工具尖点去对 安装在与机器人末端垂直面的工具尖点
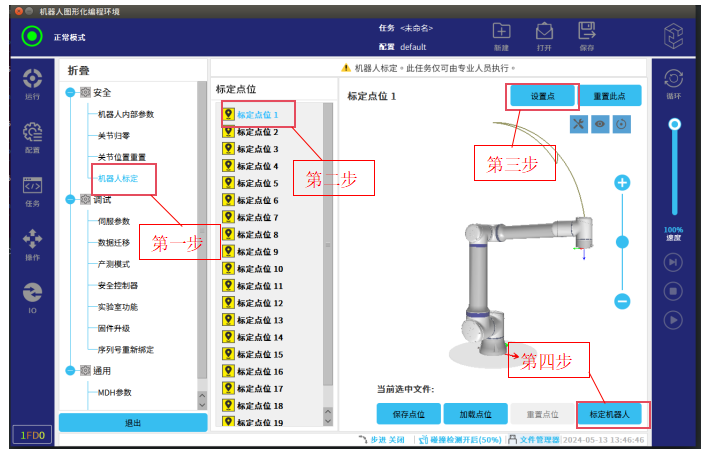
图-16
第四步:将20个点位都设置好了之后,点击“标定机器人”即可,这样机器人标定就完 成了
2.5开机自动加载任务,按照图-17操作步骤所示
第一步:点击“启动"
第二步:勾选”开机自动加载任务文件“选项
第三步:选择需要加载的文件
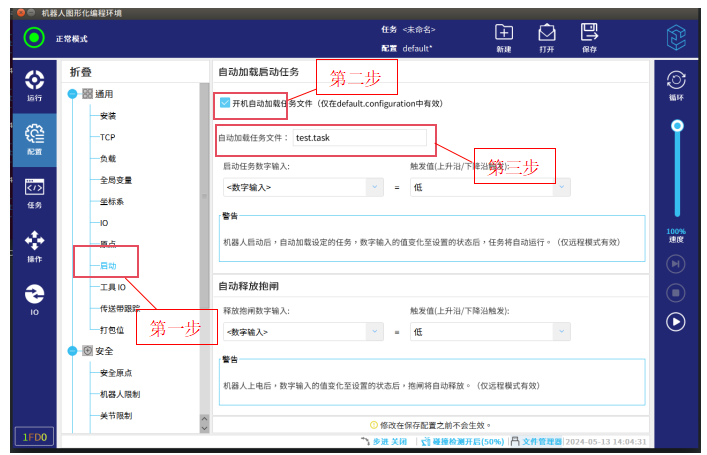
图-17
3. 常见问题解答
3.1设置IP时在使用机器人FB2网口时可能会出现FB网口始终处于未连接状态,这时就需要重启一下示教器。
3.2在标定完机器人后发现机器人零位还是不对,比如使用对齐功能机器人还是对不齐,出现这种现象有可能就是在进行机器人标定时误差值有点大,需要重新进行机器人标定,在进行机器人标定时要机器人末端安装的工具尖点去对安装在与机器人末端垂直面的工具尖点


























