
















EC机器人末端IO接线和控制柜485接线
1. 简介
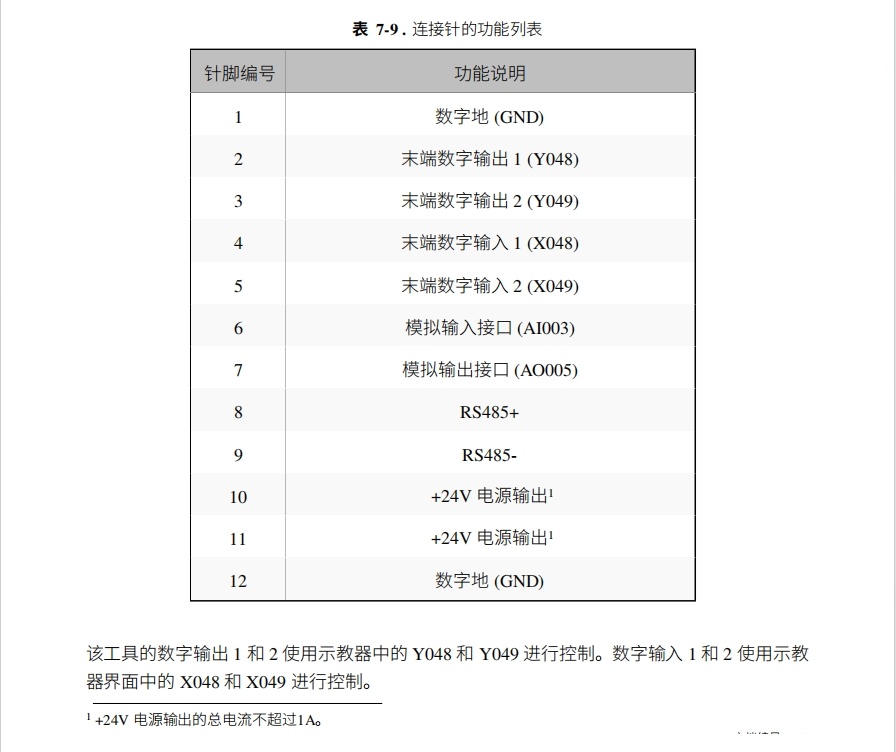
EC机器人除了控制柜提供了IO接口与485接口外,在机器人末端也提供了IO接口,其中包括2路数字输入,2路数字输出,1路模拟输入,1路模拟输出,24V供电与1路485接口。

2. 末端IO接线说明
2.1 数字输入输出接线说明
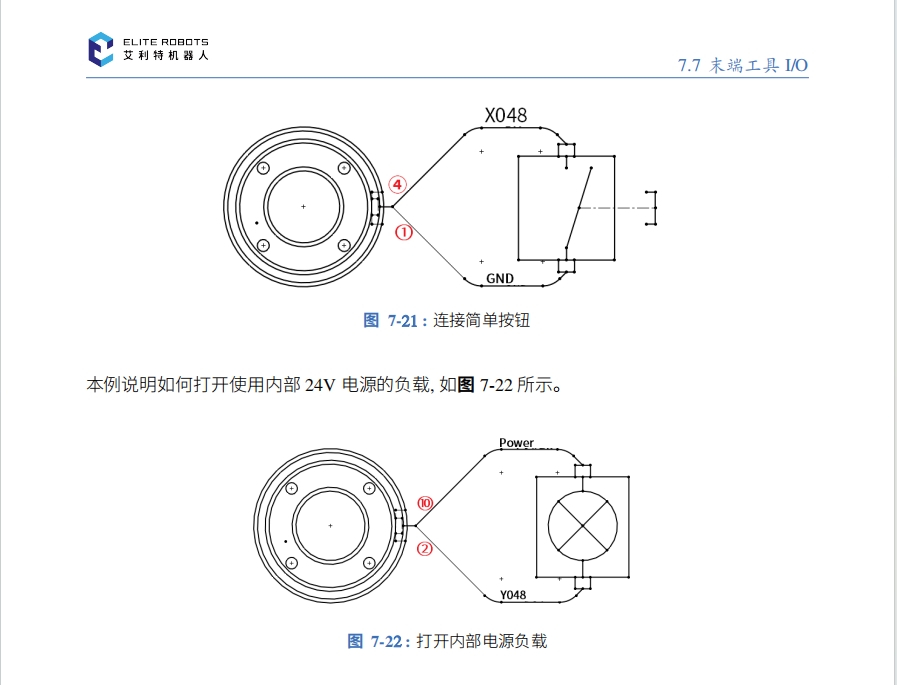
即使负载已关闭,电源接头和防护罩/地面之间仍存在电压。
2.2 模拟输入接线说明
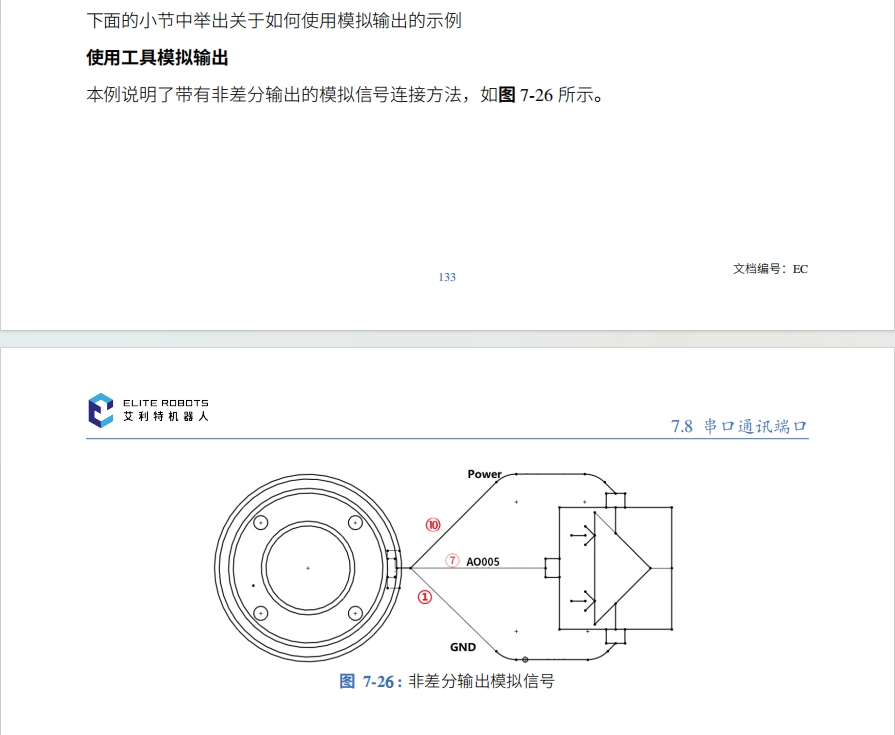
2.3 模拟输出接线说明
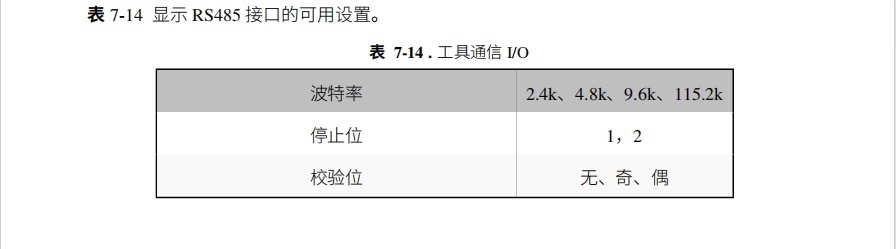
2.4 末端485说明
具连接器还提供串行接口,用于使用 RS485 协议与工具通信。
使用通讯 I/O 时,请记住以下几点:
信号请求 RS485 信号使用内部自动防故障偏置。如果连接的设备不支持该自动防故障功
能,则信号偏置必须在连接的工具中完成,或者通过在 RS485A 处添加上拉电阻器和在
RS485B 处添加下拉电阻器来外置添加。
从机器人控制器上写入发送数据到数据在末端工具 I/O 的 RS485上开始发送,延迟范围为
2ms 到 4ms。 从末端工具 I/O 的 RS485 上开始接收数据到机器人控制器收到数据并开始处理,延迟范 围为 2ms 到4ms
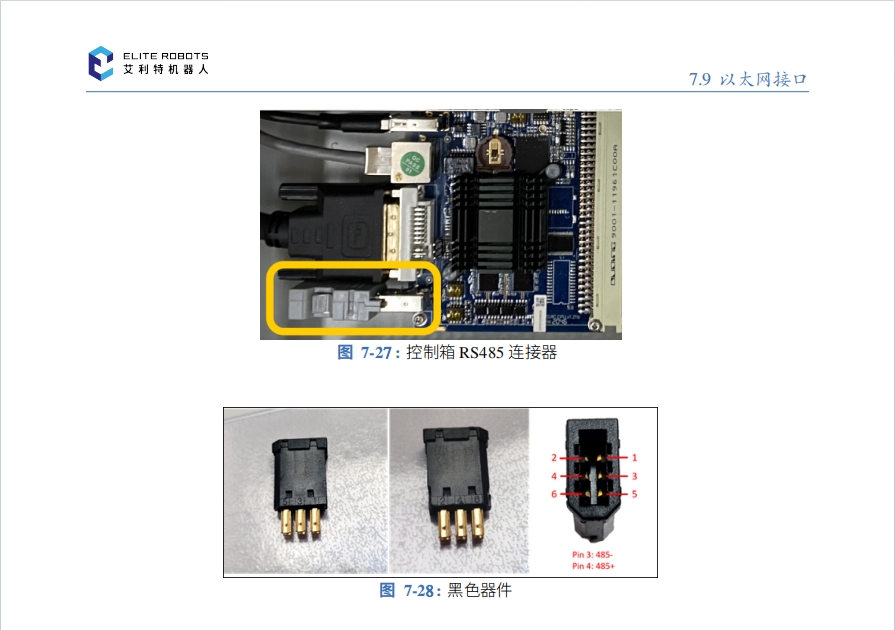
3. 控制柜485接线说明
控制箱提供一个独立的 RS485 设备接口,接口连接器为 图 7-27 中黄色框内的部分。为了在
控制箱中设置 RS485 连接器,必须拆卸串口连接器,并将 RS485 线焊接到黑色连接器背面
的金属触点 (图 7-28 )。
黑色器件的正反面分别标有 PIN“1 3 5”和“2 4 6”。PIN3 应焊接到 RS485B,PIN4 应焊接到
RS485A。该接口支持的最大波特率为 2 Mbits/s。
3.1焊接对应针脚
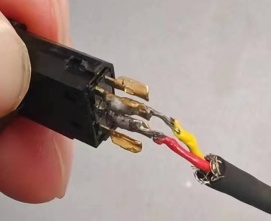
3.2将针脚之间用绝缘胶带或者热缩管进行隔离开,防止粘连。

3.3插回控制柜。

4. 常见问题解答
4.1.问:接好485线后发现通讯失败,数据不正常。
答:检修485A与485B是不是接反了,有没有粘连的情况。


























