
















CS机器人打包
1. 简介
介绍如何移动到打包位(机器手本体装箱姿态)操作流程与注意事项,主要用于机器手本体转移。
2. 操作流程
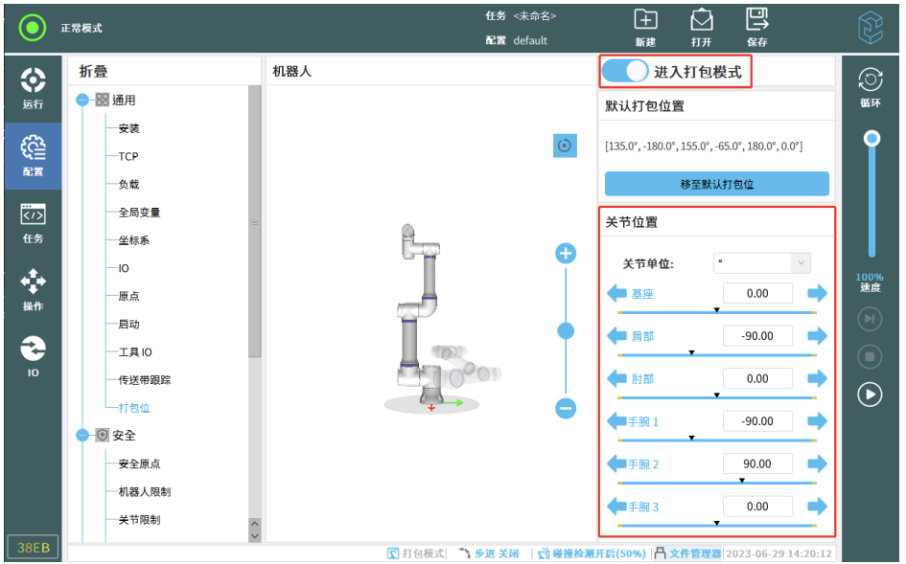
点击“配置> 通用> 打包位”进入打包位功能设置界面,点击“移至默认打包位”步骤

按钮可进入自动移动页面,将机器人移动至打包位置。若用户在当前机器 人配置中设置了安全平面、关节范围等数据,导致打包位置无法到达,可选择“进入打包模式”,在打包模式下,机器人运动范围将不再检测安全平面和关节位置极限,此时机器人可以正常运行至打包位。 离开打包位页面后,系统将自动退出打包模式。
3. 常见问题解答
3.1. CS 机器人出厂包装打包
机器人有两种打包姿态对应纸箱,现场是新款纸箱并且软件系统版本2.11.0之后,现场是旧款纸箱并且软件系统版本2.11.0之前,可按照操作流程直接移动到打包位。 (新打包姿态更新版本2.11.0)
现场是纸箱和软件版本不匹配的,需手动jog到对应打包位姿态,操作如下

进入下图页面,在右侧修改对应型号六轴姿态角度(具体查看本文档新/旧各机型打包姿态角度),点击“确定”,确保空间足够后按住“自动移动”

打包过程如下图所示(以 CS612 为例):使用机器人 打包程序设定调整好打包姿态时,(旧款纸箱将本体垫块垫在肩部关节与手腕关节之间,确认起到充足的支撑作用后),将本体放入下包材中,确认整个大臂和肘部关节被有 效支撑后,盖上上包材,最后封好纸箱。
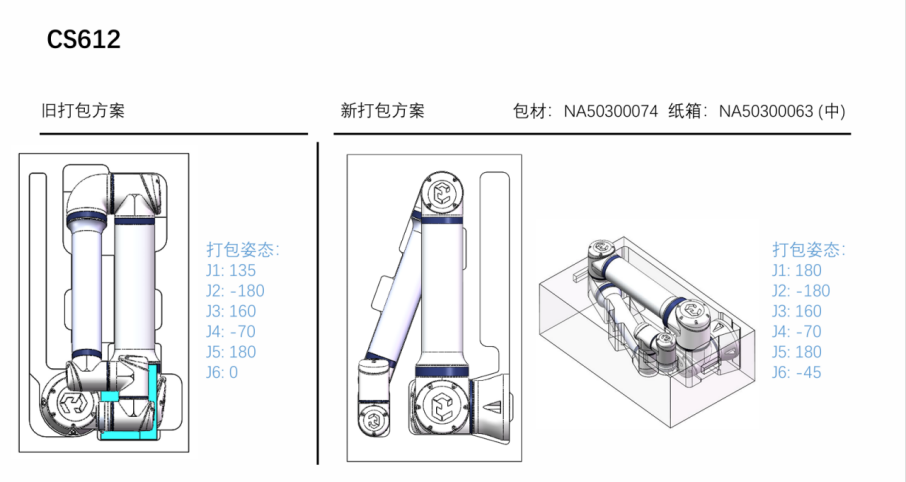
旧打包姿态纸箱内部结构(下图是CS612为例)

旧各机型打包姿态角度为:
CS63:(A1:135°、A2: -180°、A3: 150°、A4: -60°、A5: 180°、A6: 0°);
CS66:(A1:135°、A2: -180°、A3: 155°、A4: -65°、A5: 180°、A6: 0°);
CS68:(A1:135°、A2: -180°、A3: 150°、A4: -60°、A5: 180°、A6: 0°);
CS612:(A1:135°、A2: -180°、A3: 160°、A4: -70°、A5: 180°、A6: 0°);
CS616:(A1:135°、A2: -180°、A3: 153°、A4: -63°、A5: 180°、A6: 0°);
CS616-9:(A1:135°、A2: -180°、A3: 151.4°、A4: -62.8°、A5: 180°、A6: 0°);
CS620:(A1:135°、A2: -180°、A3: 160°、A4: 110°、A5: 0°、A6: 0°);
CS625:(A1:135°、A2: -180°、A3: 160°、A4: 110°、A5: 0°、A6: 0°);
新打包姿态纸箱内部结构(下图是CS66为例)

新各机型打包姿态角度为:
CS63:(A1:180°、A2: -180°、A3: 145°、A4: -55°、A5: 180°、A6:-45°);
CS66:(A1:180°、A2: -180°、A3: 160°、A4: -70°、A5: 180°、A6:-45°);
CS68:(A1:180°、A2: -75°、A3: 155°、A4: -80°、A5: 180°、A6:-45°);
CS612:(A1:180°、A2: -180°、A3: 160°、A4: -70°、A5: 180°、A6: -45°);
CS616:(A1:180°、A2: -177.6°、A3: 157.6°、A4: -82.3°、A5: 180°、A6: -45°);
CS616-9:(A1:180°、A2: -180°、A3: 150°、A4: -60°、A5: 180°、A6: -45°);
CS620:(A1:180°、A2: -180°、A3: 160°、A4: -70°、A5: 180°、A6: -45°);
CS625:(A1:180°、A2: -175.7°、A3: 155.8°、A4: -70°、A5: 180°、A6: -45°);
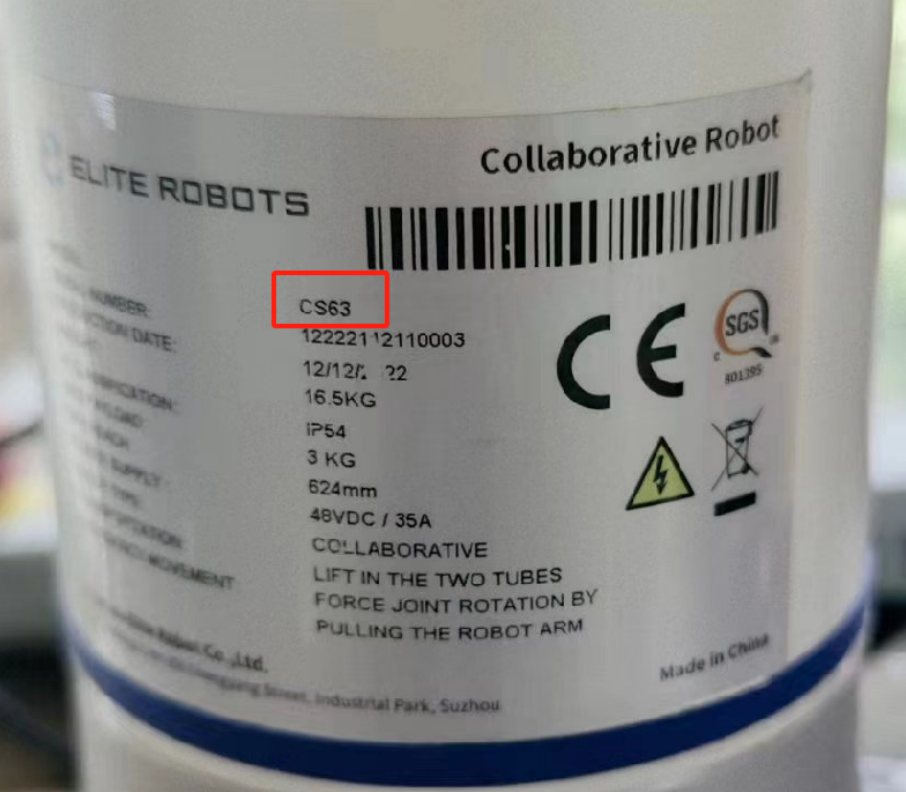
3.2. 查看机器手型号
机器手本体底座标签
示教器在主界面点击进入关于查看机器人型号



























