
















CS机器人IO接线
1. 简介
CS机器人内部电气IO接口包括安全 IO、远程开关、高速数字输入,IO电源、可配置 IO、数字 IO 和模拟 IO。输入和输出都为PNP型
2. IO定义

2.1控制柜内部电气接口示意图

2.2控制柜内部标识颜色区分







2.3控制柜IO接口定义
3. 示例
3.1 安全IO接线
所有安全 IO 成对存在(冗余),必须保留成两个独立的分支。单一故障不会导致丧失安全功能。固定的输入有两个:紧急停止和防护停止。紧急停止输入仅用于紧急停止设备。防护停止输入可用于所有类型的安全型保护设备。

安全IO默认配置接线

单个或多个外部急停按钮连接
3.2 远程开关机
1、远程 ON/OFF
远程 ON/OFF 功能端子提供 12V 辅助电源。在控制柜主电源开关打开,同时控制柜未启动的情况下,功能端子的 12V 辅助电源端子将保持带电状态。
远程 ON 输入仅用于短时间激活,其工作方式与 POWER 按钮相同,激活时间至少大于200ms,小于3s.。
注意:可以使用软件中的功能去自动加载和启动任务。
2、远程开关机电气规格

表3.1远程开关机电气规格
3、远程 ON/OFF 接线

3.2远程 ON/OFF 接线
3.3 可配置IO
CS 系列控制柜包含 8 组可配置输入和 8 组可配置输出,用户可通过示教器定义可配置 IO 的功能。
1、可配置IO设置
可配置输入可以设置成:启动任务、停止任务、暂停任务、拖动模式
可配置输出可以设置成:未运行时最低、未运行时最高、运行时最高-停止时最低和运行时的连续脉冲。


2、可配置IO电气规格

3、可配置IO接线方式

3.4 输入输出接线
CS 系列控制柜支持 16 路数字输入和 16 路数字输出。可用于输入或输出数字量信号,信号类型为PNP型。
1、 电气规格

2、 使用内部电源供电接线说明
1、数字输入接线方式

2、数字输出接线方式

3、使用外部稳压电源供电,数字输入输出接线方式
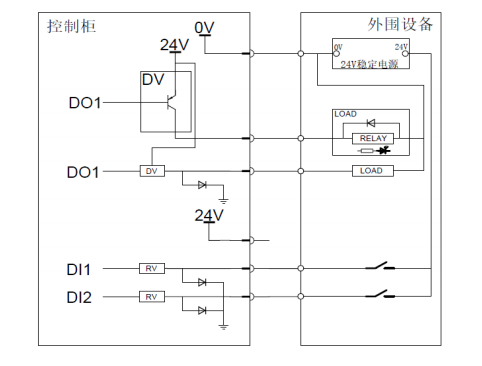
数字输入输出接线方式
3.5 模拟IO
模拟 IO 接口可用于接收/发送模拟量信号(电压(0V~10V)或电流(4mA~20mA))。
在示教器界面IO中可以对模拟输入和模拟输出类型进行选择切换,选择电流或电压。

为保证高准确度,建议遵循以下说明:
使用最靠近此 IO 的 GNDPA 终端。保证信号端与终端共享同一个滤波器;
设备和控制柜使用相同的接地(0V)。模拟 IO 与控制柜不进行电位隔离;
使用屏蔽电缆或双绞线。将屏蔽线与“电源”端子上的“GNDP”终端相连。
模拟IO接线方式:

3.6 IO电源
CS 系列控制柜数字 IO 可由内部 24V 电源供电,也可使用外部电源通过配置电源接线端子供电。
其中“PWR”为内部电源24V 正极,“GND”为内部电源负极,“24V”为所有通用数字 IO正极,
“0V”为所有数字 IO 负极。CS 系列控制柜默认配置为内部电源供电。

3.7 通过继电器NPN与PNP互转
在实际使用过程中可能会遇到各种传感器与PLC,PNP与NPN的都有,这种情况可以通过中间继电器进行信号转换,具体方法为将外部设备(如PLC)的输出信号接在继电器的线圈端,机器人输入接在继电器的常开触点端,当外部设备输出信号时,线圈得电,触点吸合,机器人得电。(输出接法则相反)



























