
















CS机器人控制柜接口介绍
1. 简介
本文主要介绍CS控制柜内部电气接口。
2. 操作流程
2.1机器人本体线缆接口和电源接口
机器人电缆必须插入控制柜底部的连接器中,在开启机器人本体时,务必适当锁定连接器(ERB1C2K0和ERB1C4K0接口不一致);断开机器人电缆时必须切断机器人的电源。
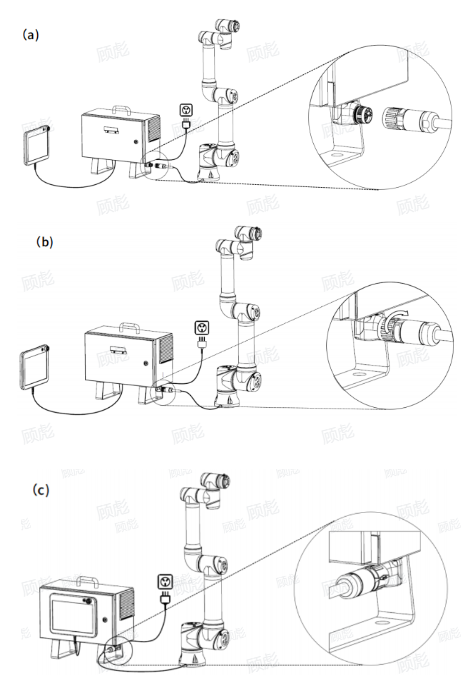
1、ERB1C2K0型控制柜

将插头插入到控制柜底部的接头里,注意插入方向,如图 a 所示;插紧后将插头上的锁紧环顺时针旋转 90°以锁定连接处,如图 b 所示;最后转动整个连接器,实现进一步锁定,如图 c 所示。
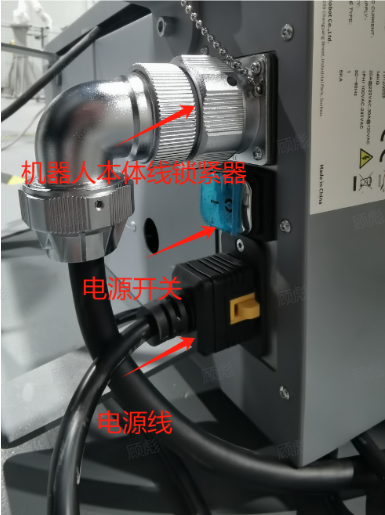
实物图为先把本体性接口锁紧器调整为open;将连接器插到底后再顺时针旋转锁紧器拧到底。

2、ERB1C4K0型控制柜
机器人本体电缆末端有一个插头,将插头插入到控制柜底部的接头里,注意插入方向,如图 a所示;然后转动整个连接器,实现进一步锁定,如图 b所示。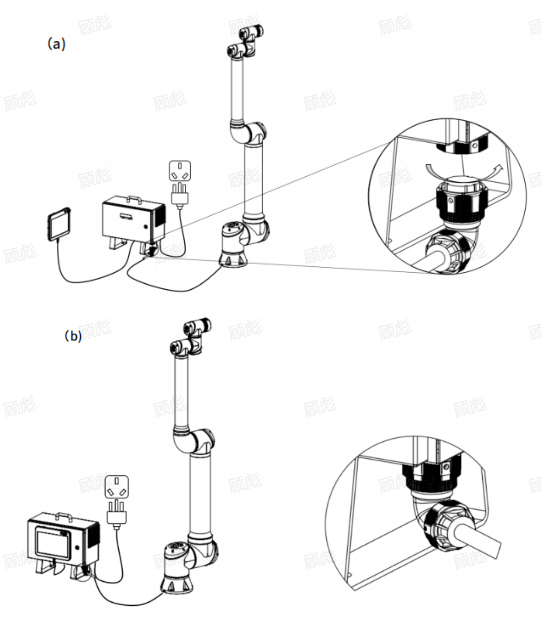
实物图为将本体现连接线对准控制柜母头插到底;然后逆时针旋转锁紧器,直到定位销从锁紧器的销孔弹出。(锁紧器到位后会有嗑噔一声)

2.2内部电气接口图
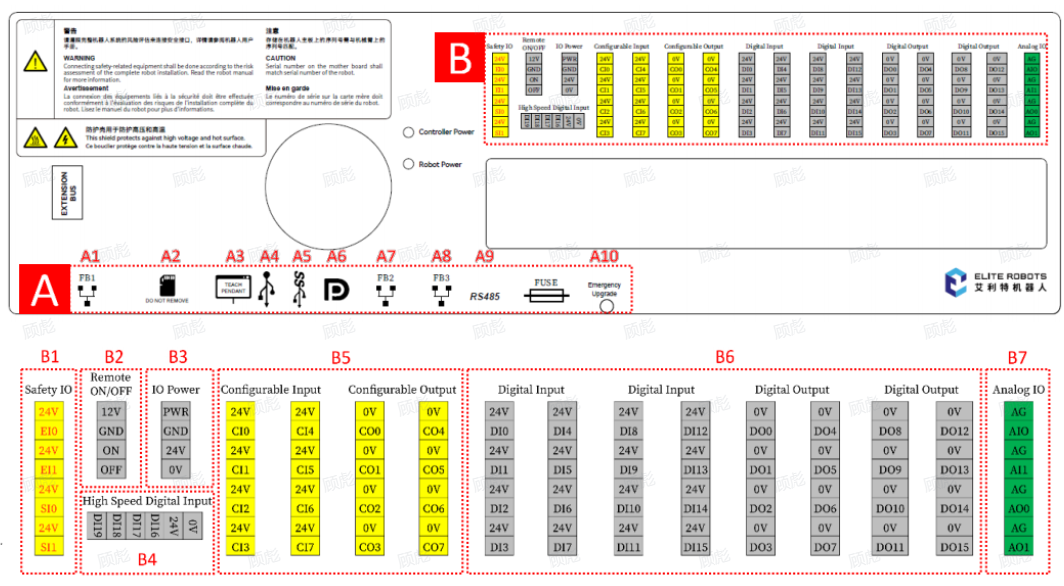
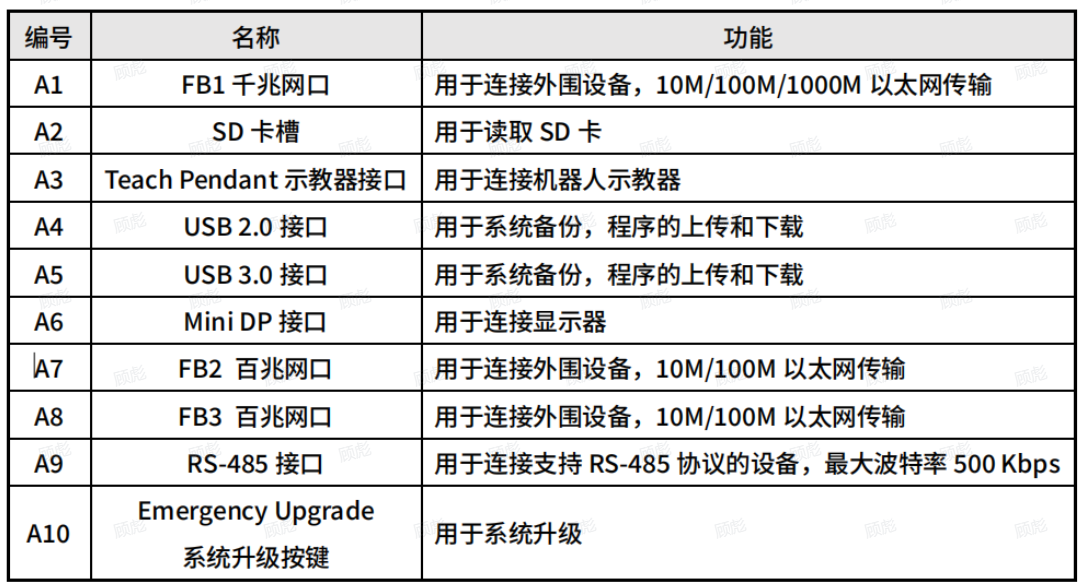
A区:网口*3、SD卡槽、示教器、RS-485、USB、Mini PD。
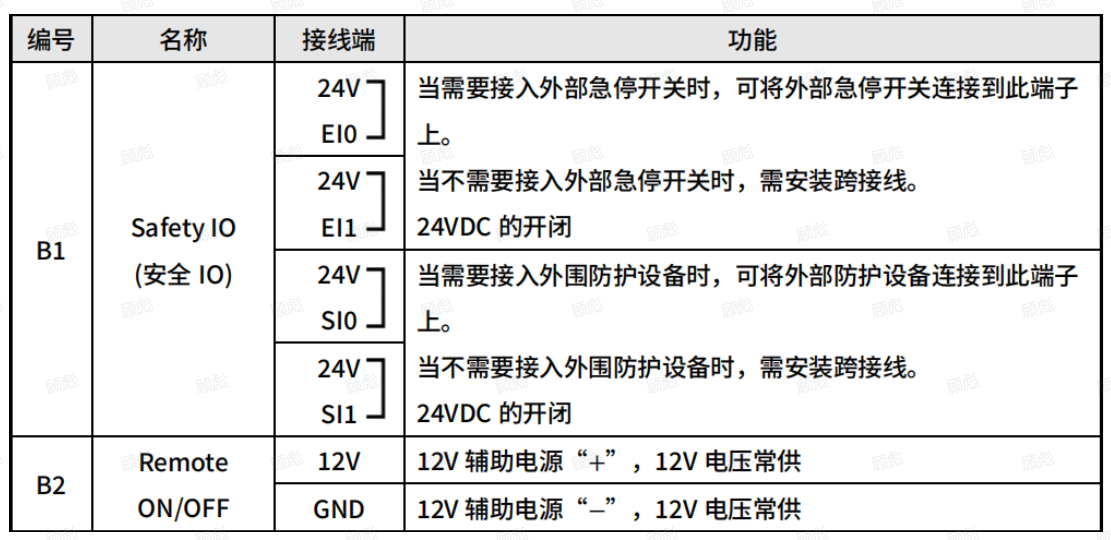
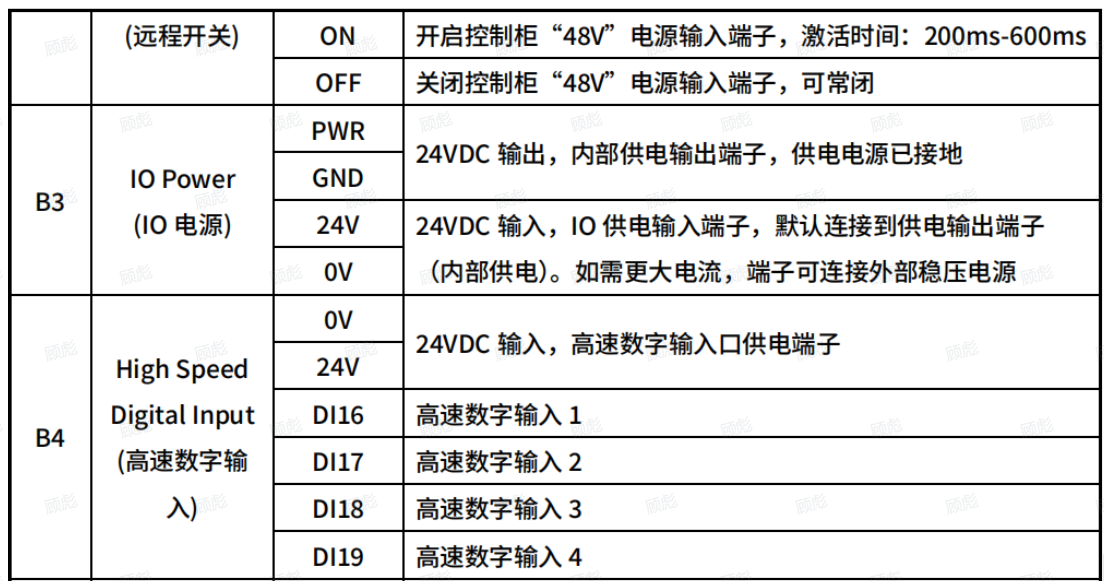
B区:B1 安全IO、B2 远程开关机、B3 IO电源、B4 高速数字输入、B5 可配置IO、B6 数字IO(PNP)、B7 模拟IO。
A区电气接口定义
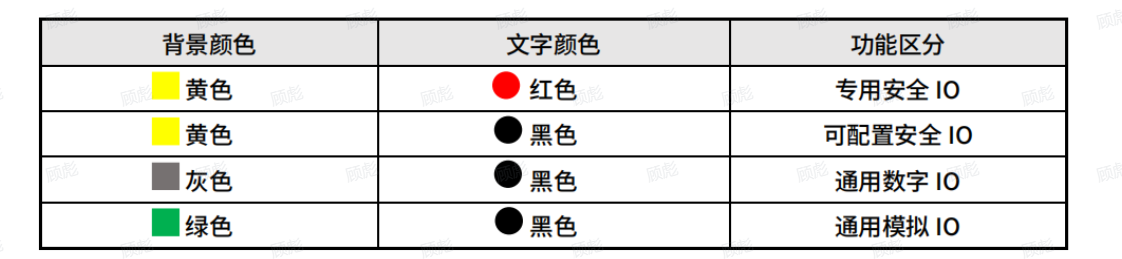
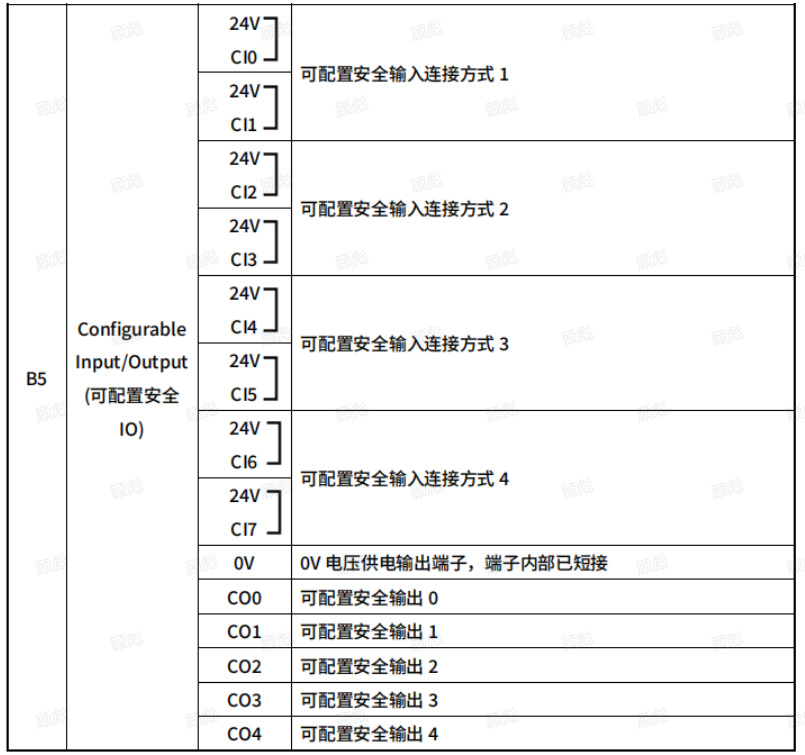
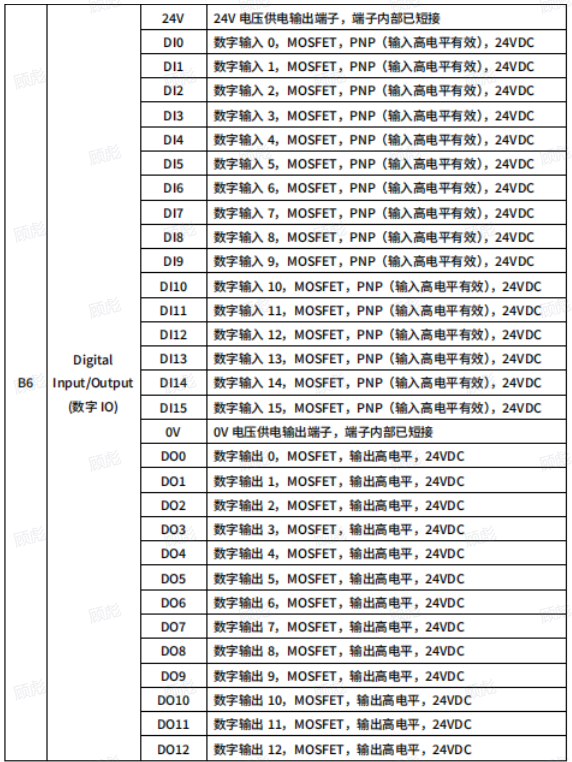
B区接口定义


3. 常见问题解答
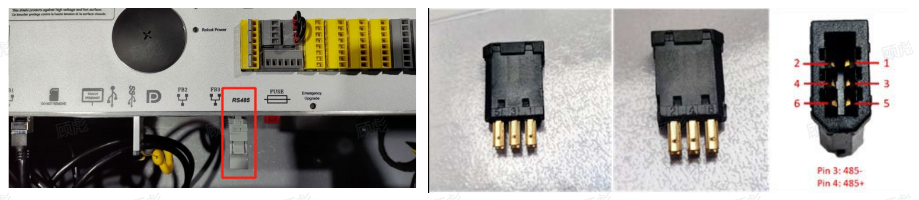
3.1 RS485通讯连接器触电定义
黑色塑料装置的正反面分别标有 PIN“1 3 5”和“2 4 6“,PIN3 应焊接到 RS485B,PIN4 应焊接到 RS485A。该接口支持的最大波特率为 500Kbps。(艾利特采购料号:[NA20200039] 连接器)
3.2如何连接外部急停
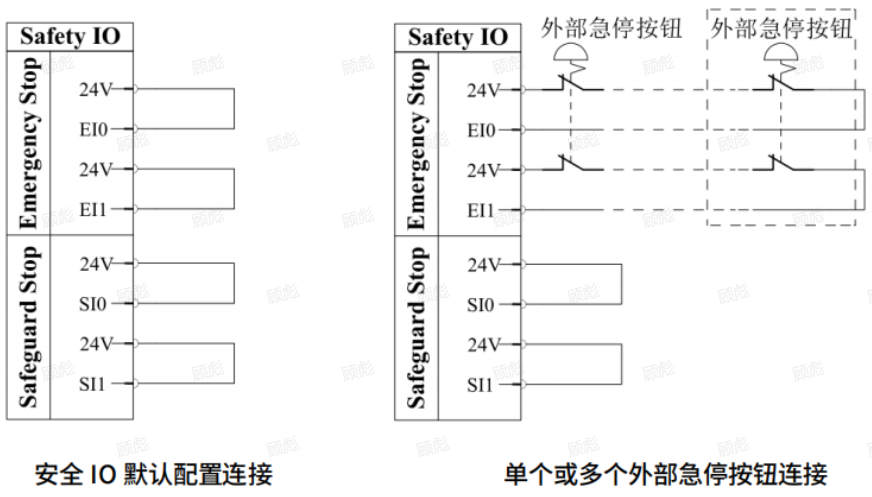
当需要连接一个或多个外部急停按钮时,所有急停按钮可串接使用。
在连接急停时应遵循双回路规则;确保一路故障的情况下另一路能实现急停功能。
如果急停接单回路拍下急停机器人会报警,必须关闭电源重新打开才可恢复正常(安全违规报警)
3.3网口FB1、FB2和FB3有什么区别
FB1网口:profinet通讯,EthernetIP通讯,VNC,二次开发端口,机器人作为modbus/TCP从站。
FB2网口:机器人运行脚本执行相关socket指令,机器人作为modbus/TCP 主站读写外部 modbus 从站数据,机器人作为modbus/TCP从站。
FB3网口:研发留位。
附:在CS机器人2.10版本前,profinet采用FB2网口。


























