
















CS机器人IO扩展模块

1. 简介

扩展IO模块由MODUBS-IO16R和USB-485转接器2部分构成,搭配EXIO4.4版本插件使用能够根据客户需求进行PNP和NPN的切换,目前可通过双MODUBS-IO16R扩展IO模块最多能够多扩展32路数字输入和输出。
2. 操作流程
2.1. 前置准备
版本信息:
● 机器人系统版本v2.10以上
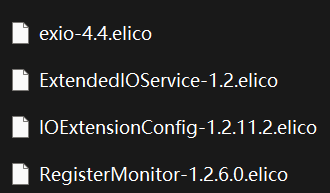
● 扩展IO插件版本v4.4exio-4.4.elico
● RTSI Service插件版本v1.2.0ExtendedIOService-1.2.elico
● IO高级配置插件v1.2.11IOExtensionConfig-1.2.11.1.elico
● 寄存器监视器插件v1.2.6RegisterMonitor-1.2.6.0.elico
硬件准备:
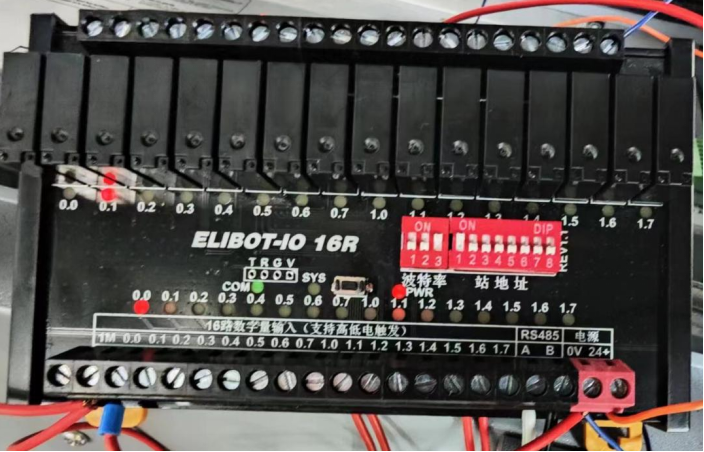
● 艾莫讯JY-MODBUS-IO16R 1个或2个
● usb转485转换器一个
环境准备:
● 安装插件(扩展IO插件,RTSI 插件,IO高级配置插件)
● 将IO模块供24V的电,模块上的”485 A/B”对应连接到usb转485转换器上再连接到机器人的usb接口
功能实现:
● IO拓展模块使用脚本函数使用
● IO拓展模块插件映射寄存器搭配高级专用配置来实现控制任务的启停,机器人的上电等功能
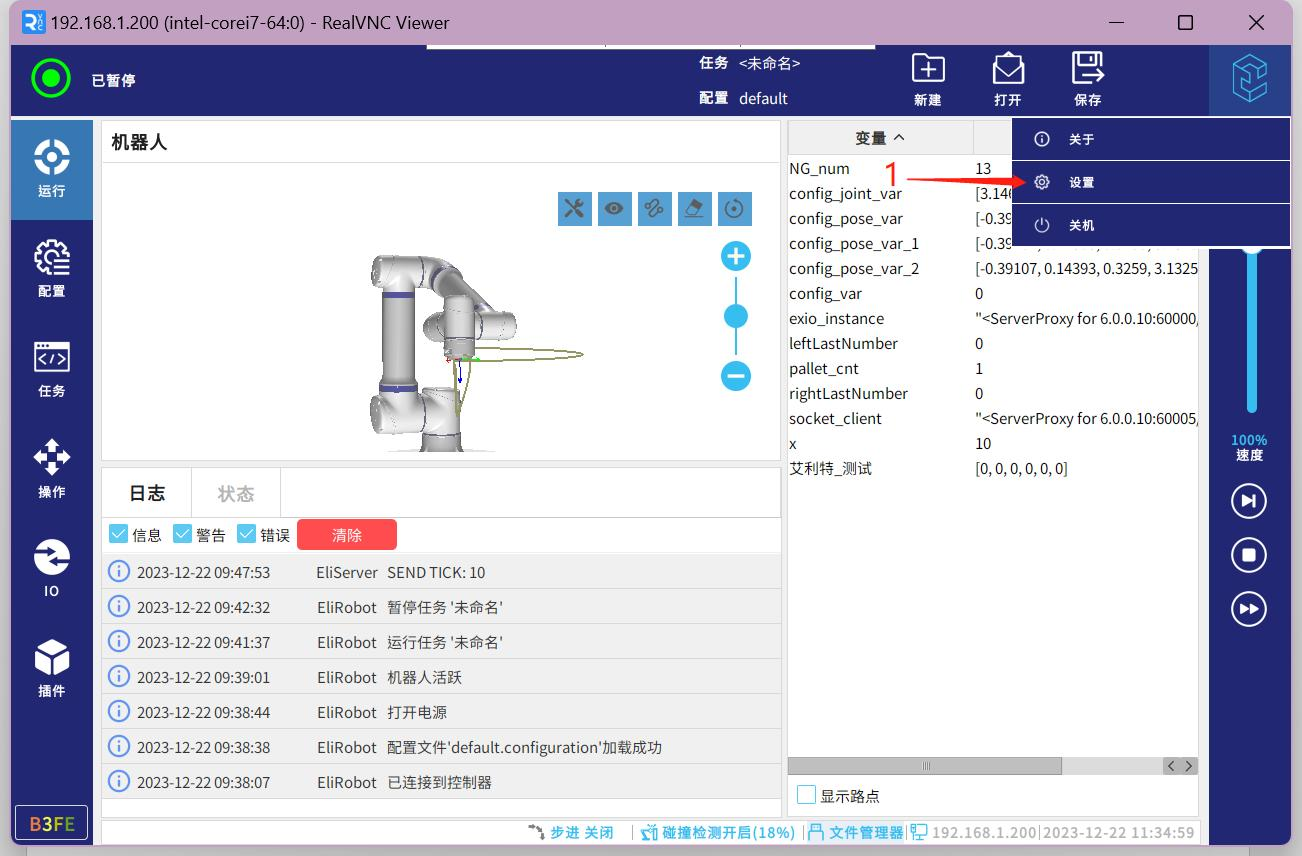
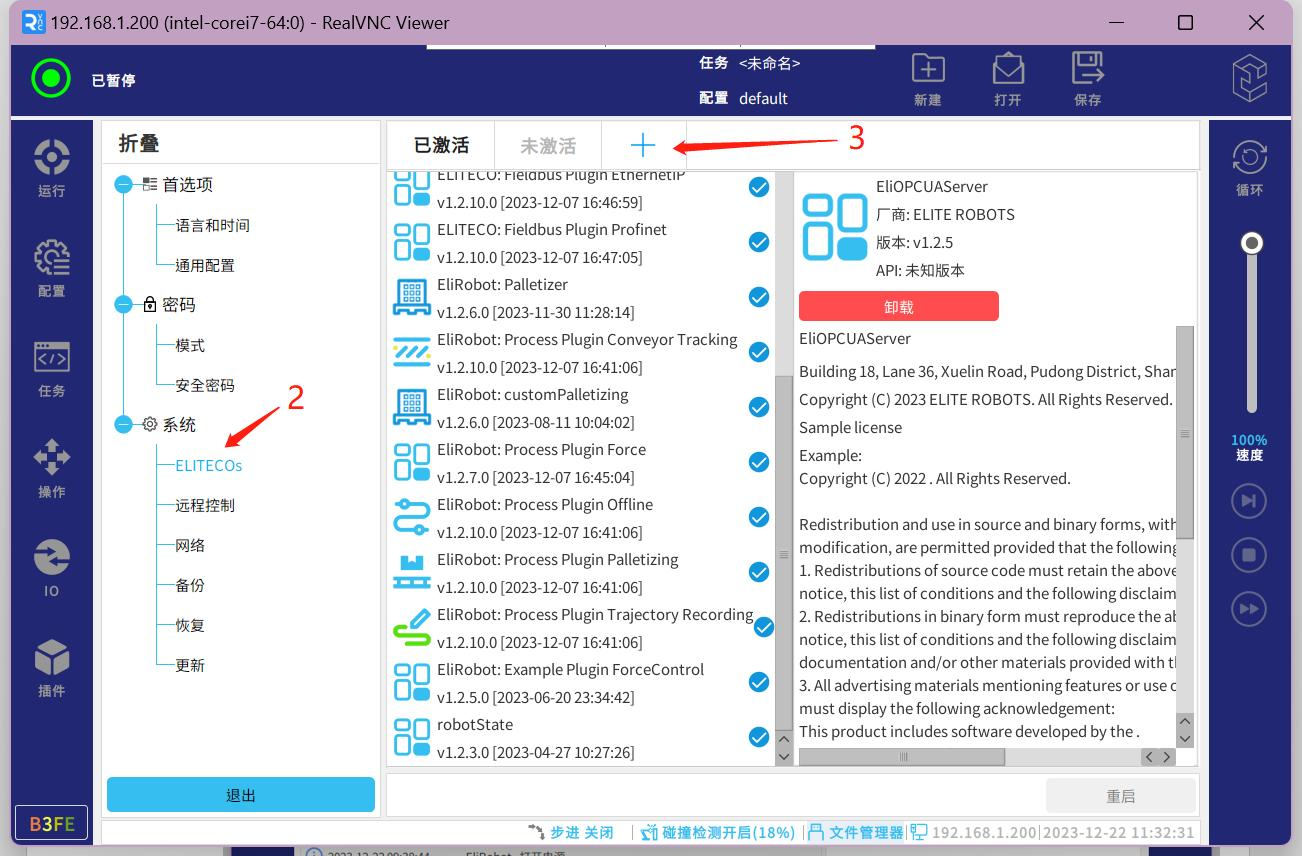
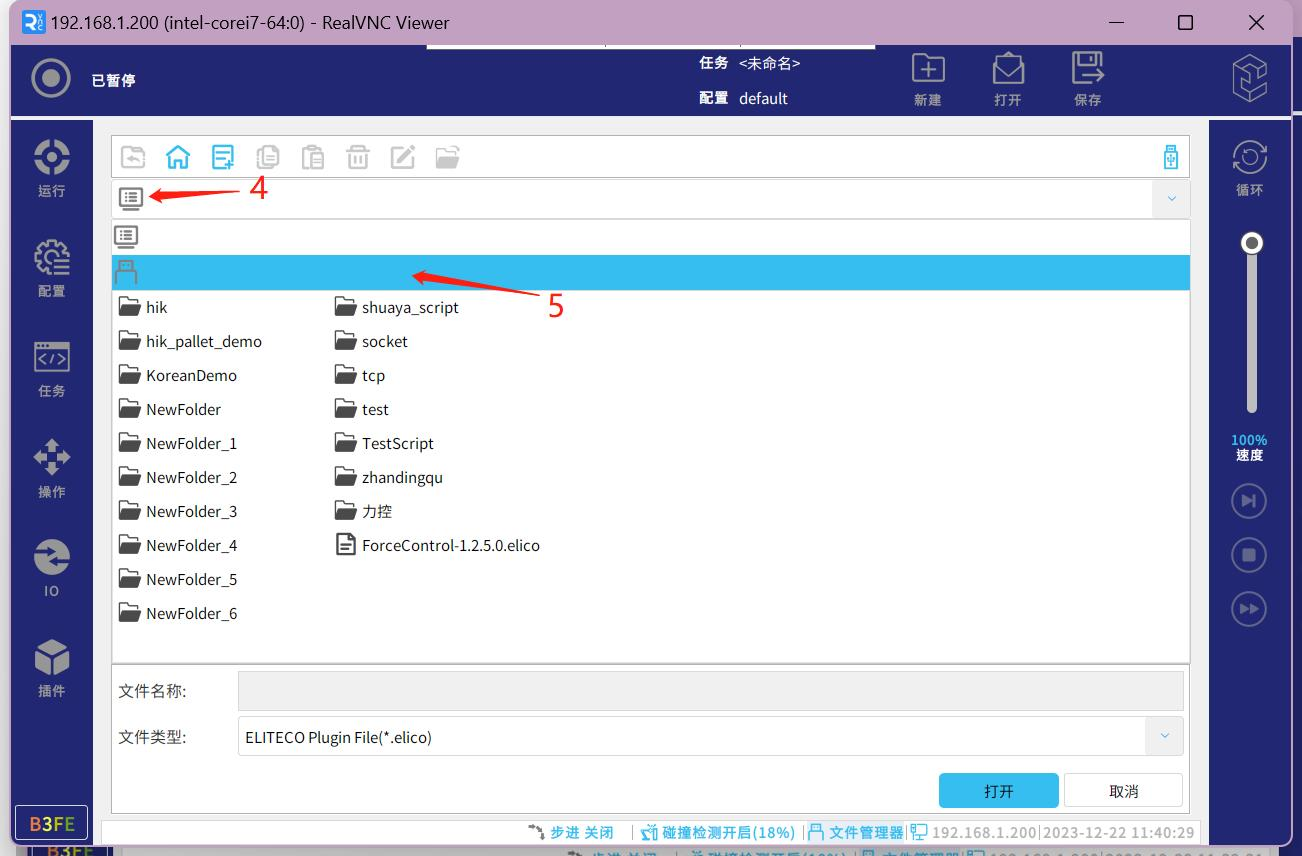
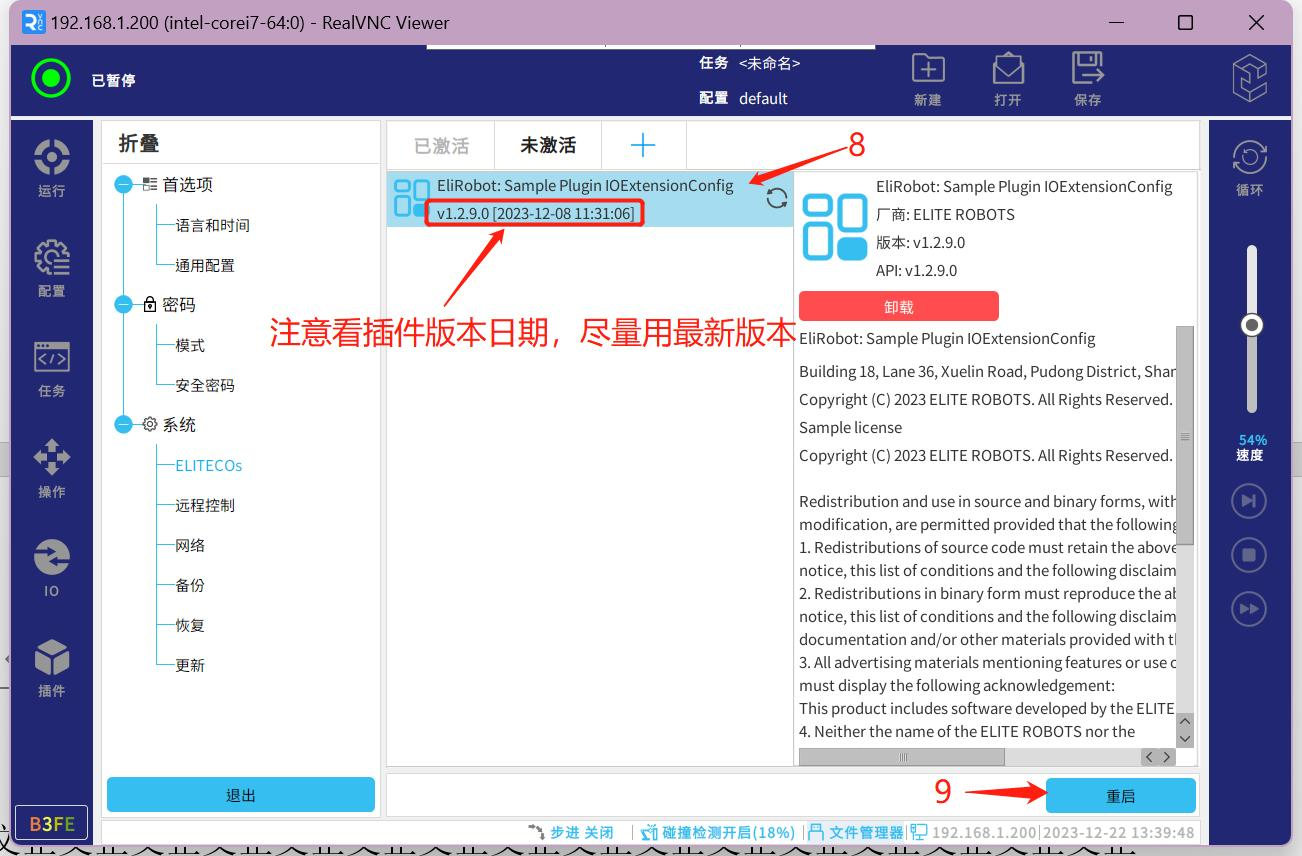
2.2. 插件导入

2.3. 模块配置


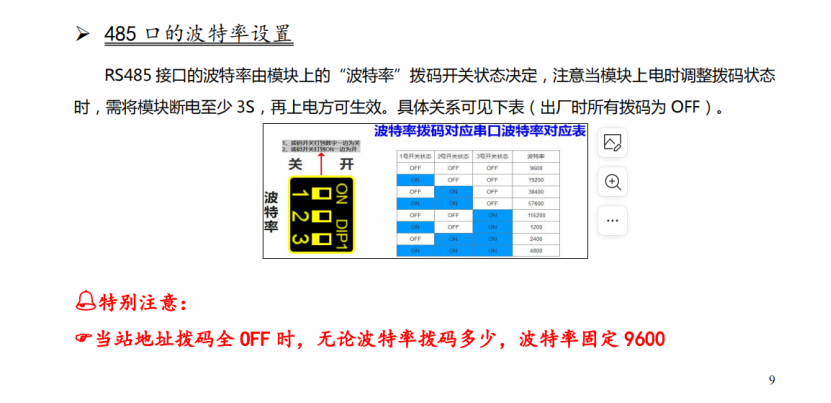
波特率需要拨成“115200“,站地址需要根据需求二进制换算站号(单模块拨码”1“ON,双模块(模块1拨码”1“ON,模块2拨码”2“ON))
2.4. 模块连接
2.4.1. 第一步(选择连接模块——连接——查看连接状态(显示已连接,com灯高频闪烁,则表示连接成功))

2.4.2. 第二步(点击插件——选择“ExIO”——控制拓展IO的输入输出查看拓展版状态反馈)
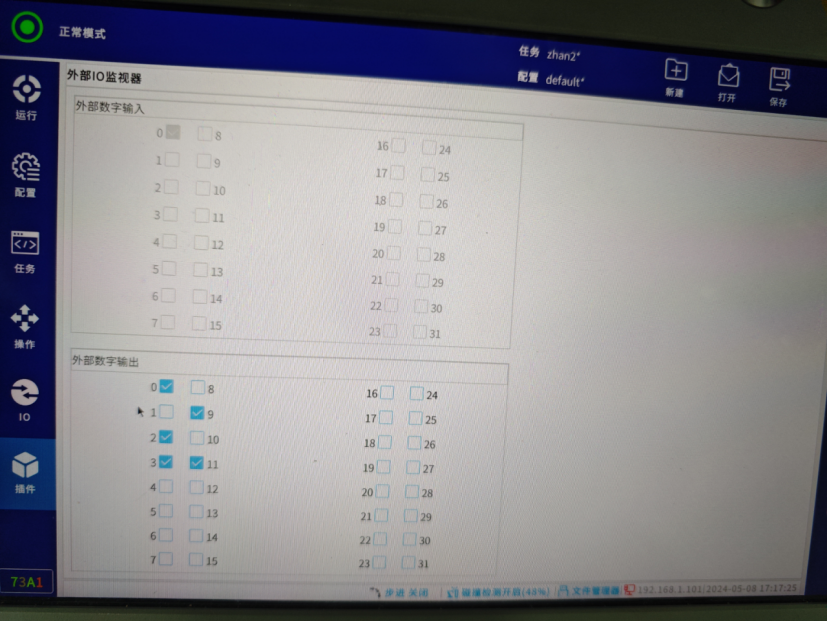
输出可以直接点击来测试
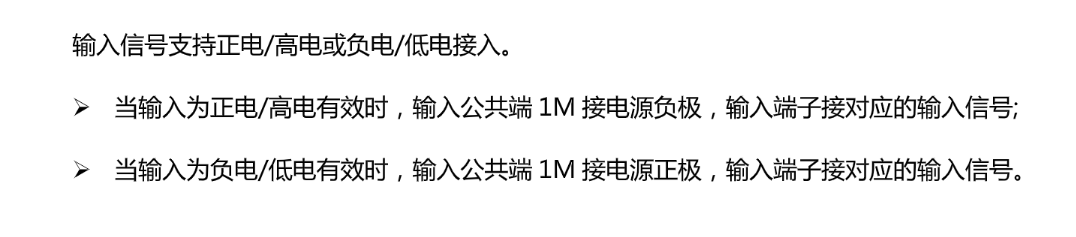
输入可以用PNP/NPN的方式公共端和输入端短接24V供电来测试
2.5. 使用方法1
通过RPC的方式提供了读写IO模块信号的脚本。

get_ex_di(0) # 获取输入信号
get_ex_do(0) # 获取输出信号
set_ex_do(0, True/FLASE) # 设置输出信号
2.6. 使用方法2
将IO模块信号映射到机器人通用寄存器中。
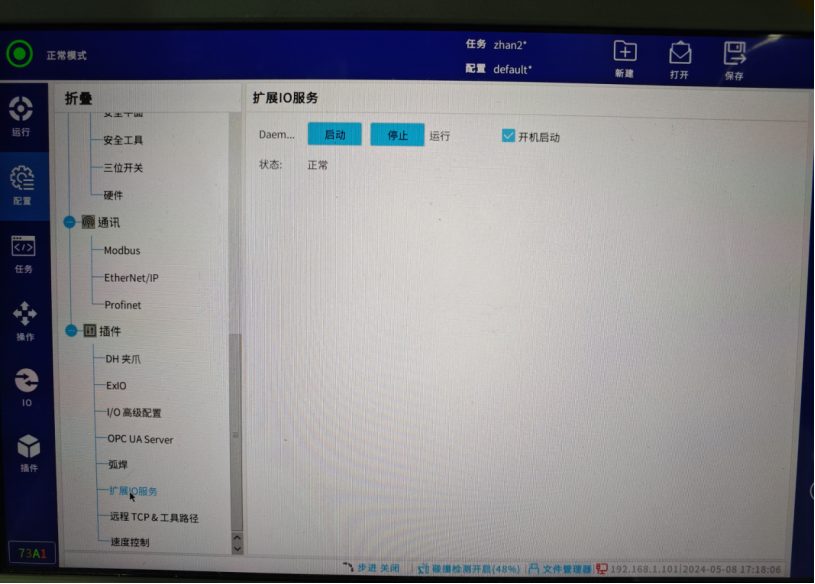
在“配置“——“插件“——“拓展IO服务“(RTSI Service插件)——启动(有需求勾上“开机自动启动“),映射寄存器需要用到RTSI Service插件
在映射寄存器之前可以先对外部IO进行”命名“,用来区分以及标识用途
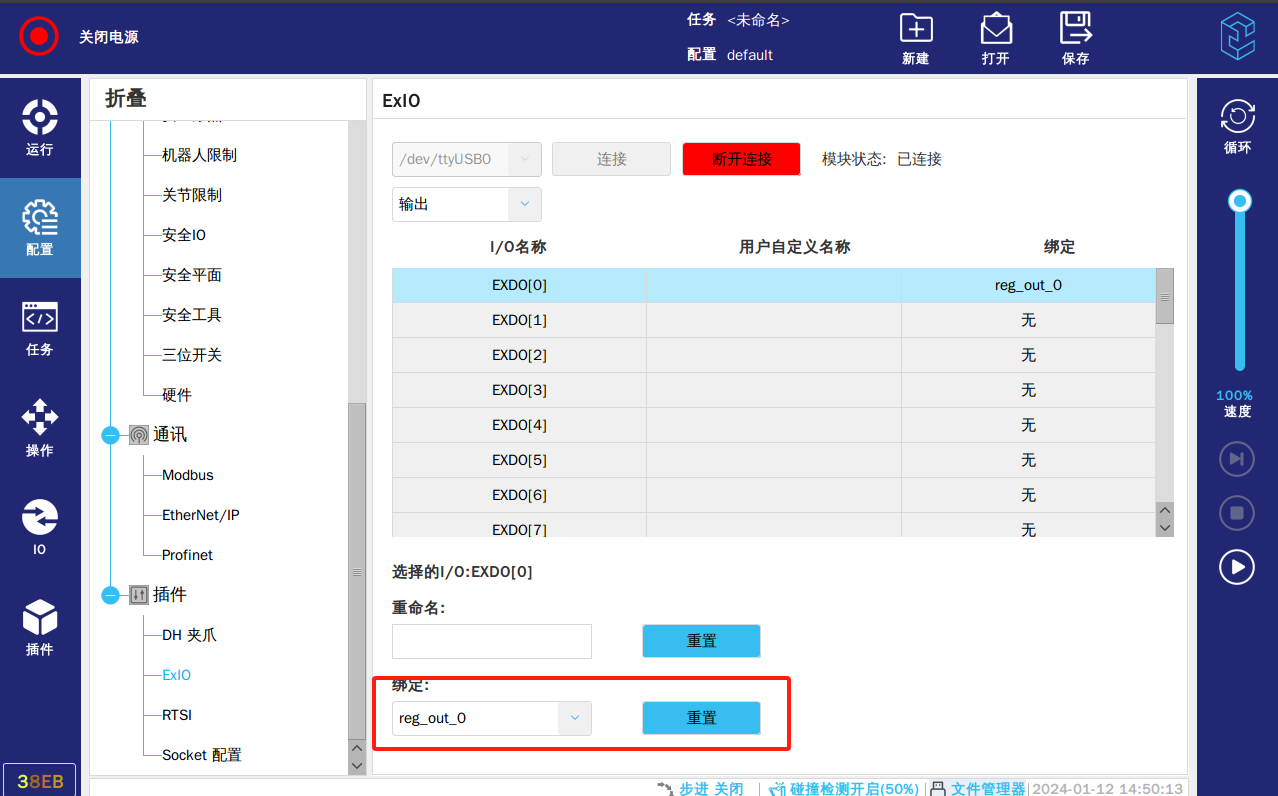
此功能是通过RTSI同步IO模块信号和机器人的寄存器,点击绑定下拉
框,选择要绑定的寄存器(注:绑定的寄存器需要在配置——IO——选择”布尔寄存器”里定义过名称的才可以绑定)
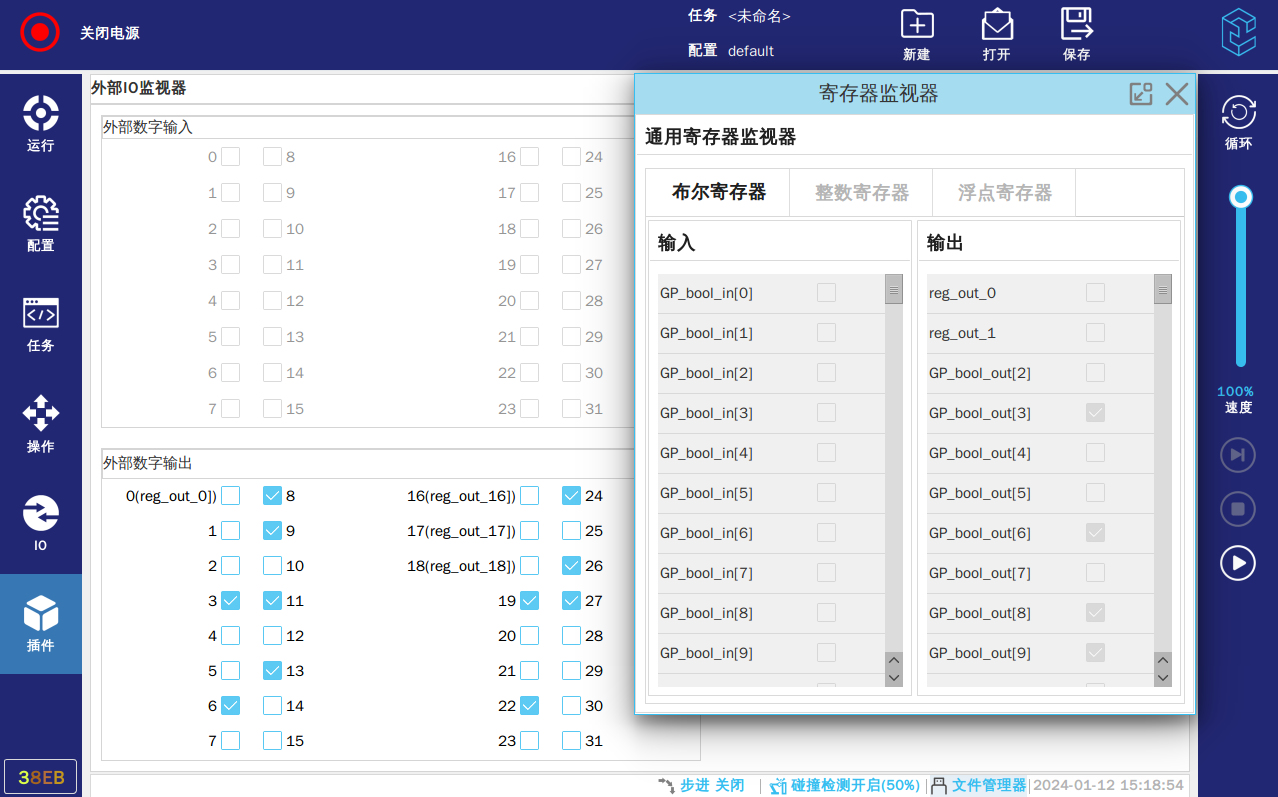
同步打开扩展IO插件导航栏(ExIO)页面和寄存器监视器页面,点击测试IO是否生效,且绑定的寄存器是否同步更改
生效之后,编程可以直接通过“设置指令“控制寄存器的输出同步映射到绑定的拓展IO上,不在需要使用脚本函数
2.7. 拓展IO配置任务的启动与停止
注:该功能只有通过“2.6.使用方法2“可以使用
在“2.6使用方法二“配置操作完成之后,可在“配置”——“插件”——“IO高级配置”选择 (启动任务 OR 停止任务 OR 暂停任务)在选择触发方式(上升沿 OR 下降沿)——使能状态选择“启用”即可
注:该功能使用前提也需要在配置——IO——选择”布尔寄存器”里定义过名称的才会显示
输入(可通过外部设备控制机器人功能):

包含一些其他配置功能
输出(可配置一些状态反馈):
可参考艾利特机器人-IO专用功能配置插件教程_20231222173741.pdf
3. 常见问题解答
拨码如果没有生效?
强制输出没有反应?
先看拨码的波特率和站号有没有设置正确
确认有没有连接上查看状态灯(com灯高频闪烁,sys灯稳定间断闪烁,pwr灯长亮)
输出是否有被绑定,并被占用,程序运行,io高级配置等


























