
















码垛机外设配置
1. 简介
本文介绍了CP码垛一体机中:升降柱、伺服控制器、机器人、以及通讯转换模块的配置。
2. 操作流程
2.1接线检查
linak(内置伺服)---网线---交换机----机器人控制柜FB1
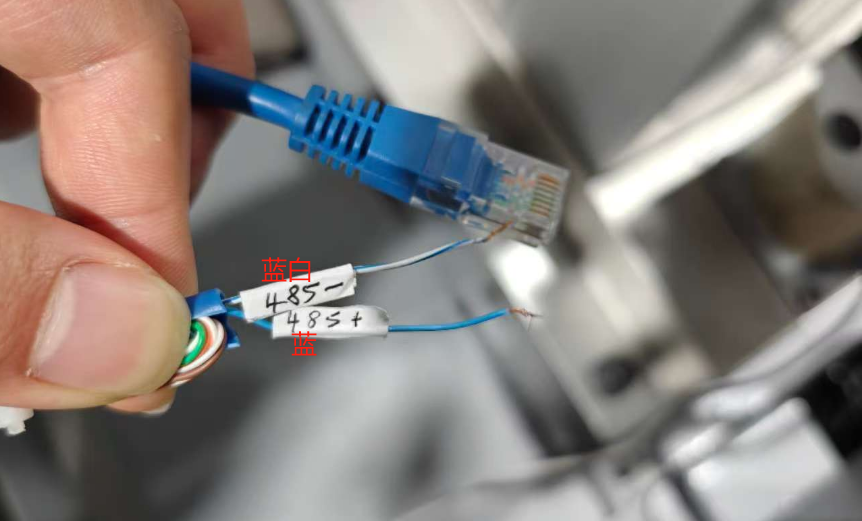
国产升降柱(外置伺服电机)---伺服控制器(汇川)----网线(剪了,蓝白485B/蓝485A接到转换模块对应口)----协议转换模块----网线----机器人控制柜FB1
2.2伺服控制器配置
力纳克升降柱不需要伺服控制器配置等,直接在机器人上安升降柱插件即可。
1、首先进入汇川官网下载伺服控制器登录汇川官网汇川技术 - 推进工业文明 共创美好生活搜索【InoDriverShop伺服后台调试软件】下载并安装。
准备一个USB转485模块,剪一根网线分出蓝白(485B)和蓝(485A)。
将USB转485和网线相连后,USB端插到电脑上(电脑必须有com驱动),一端插到伺服控制器的网口上。
打开汇川伺服后台调试软件,搜索对应型号的设备。
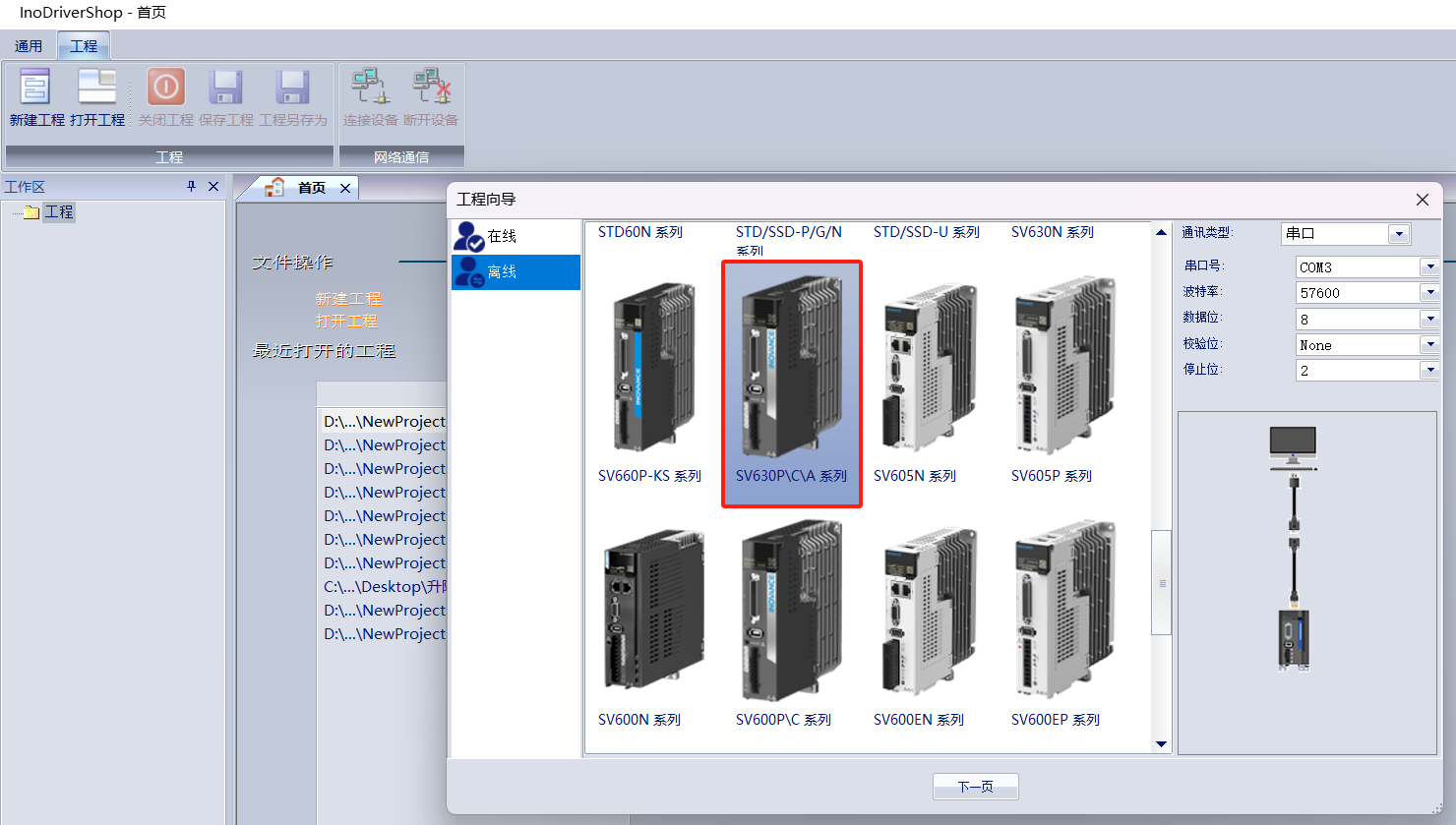
新建工程,检查伺服控制器是否已经连接。
点击IO设置;点击读取,将下方栏完全按下图所示进行配置。配置完成后下载。
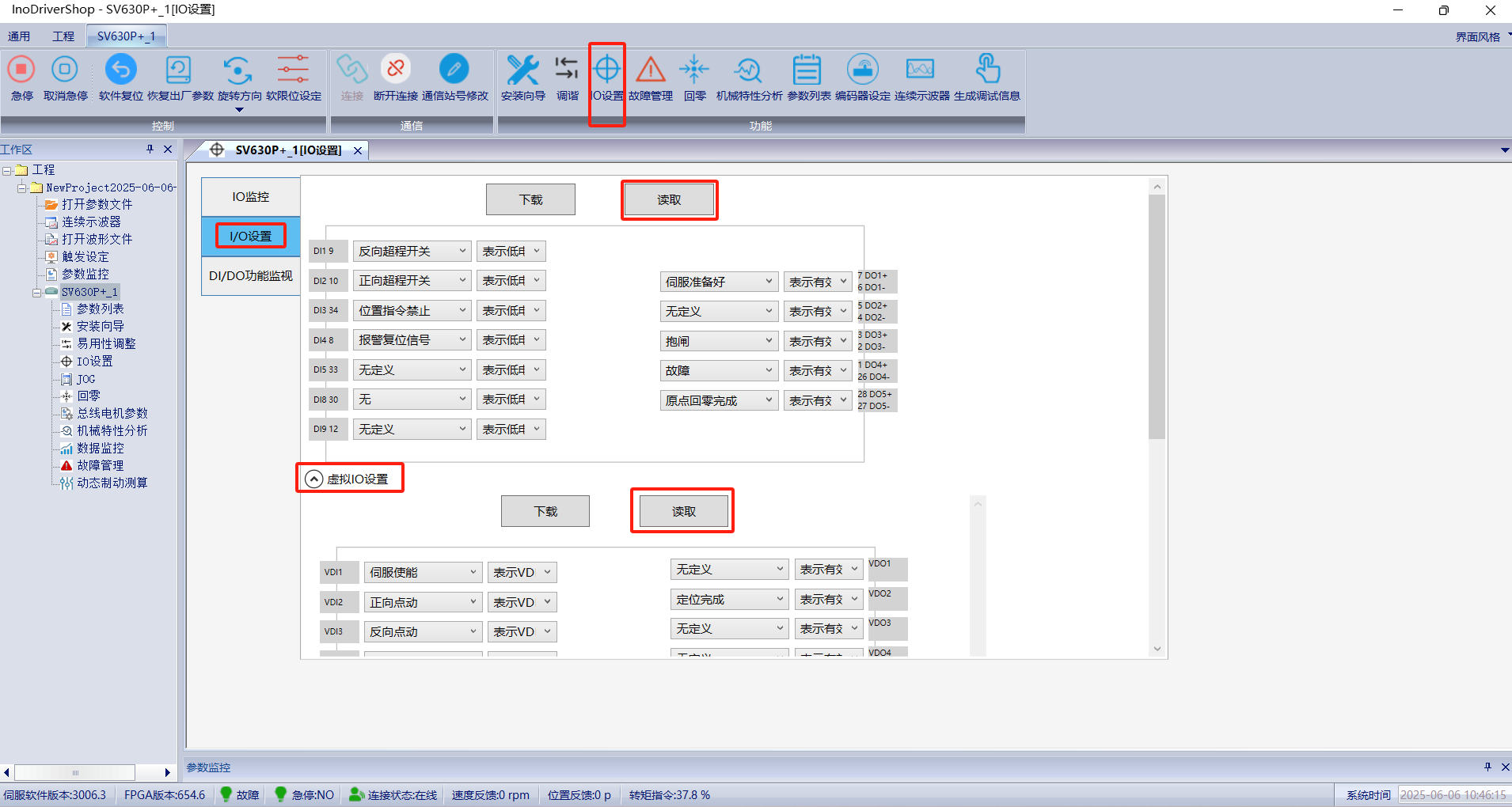
再点击虚拟IO设置,同样先读取,再配置再下载。
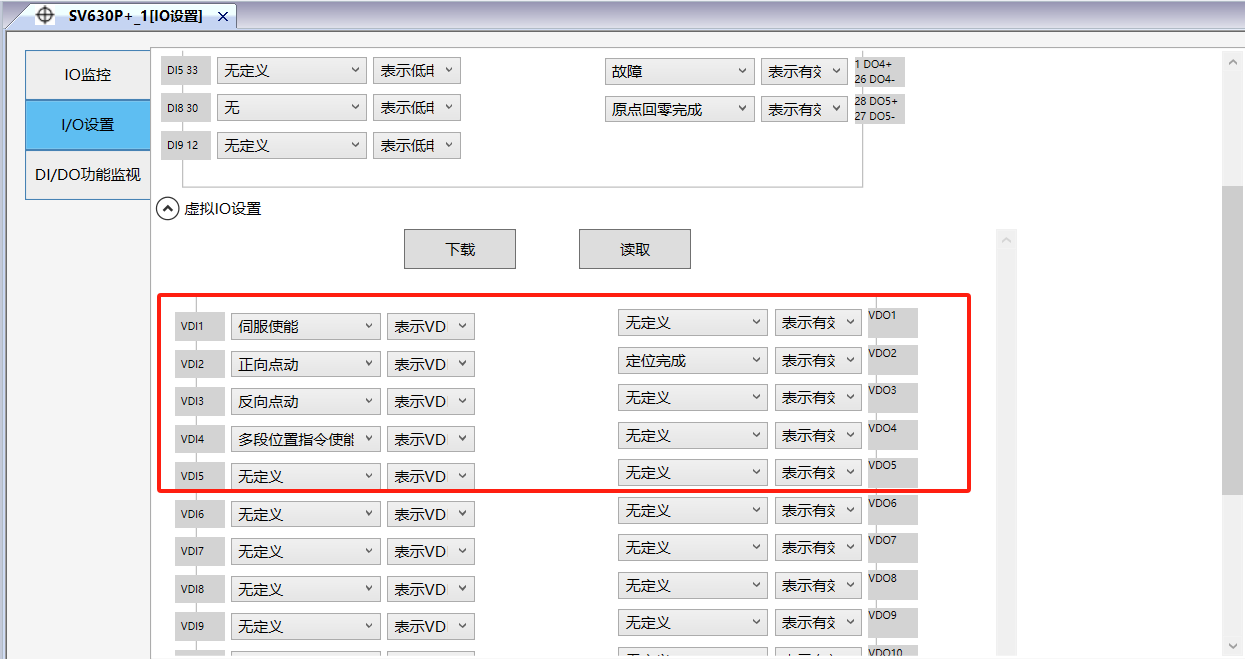
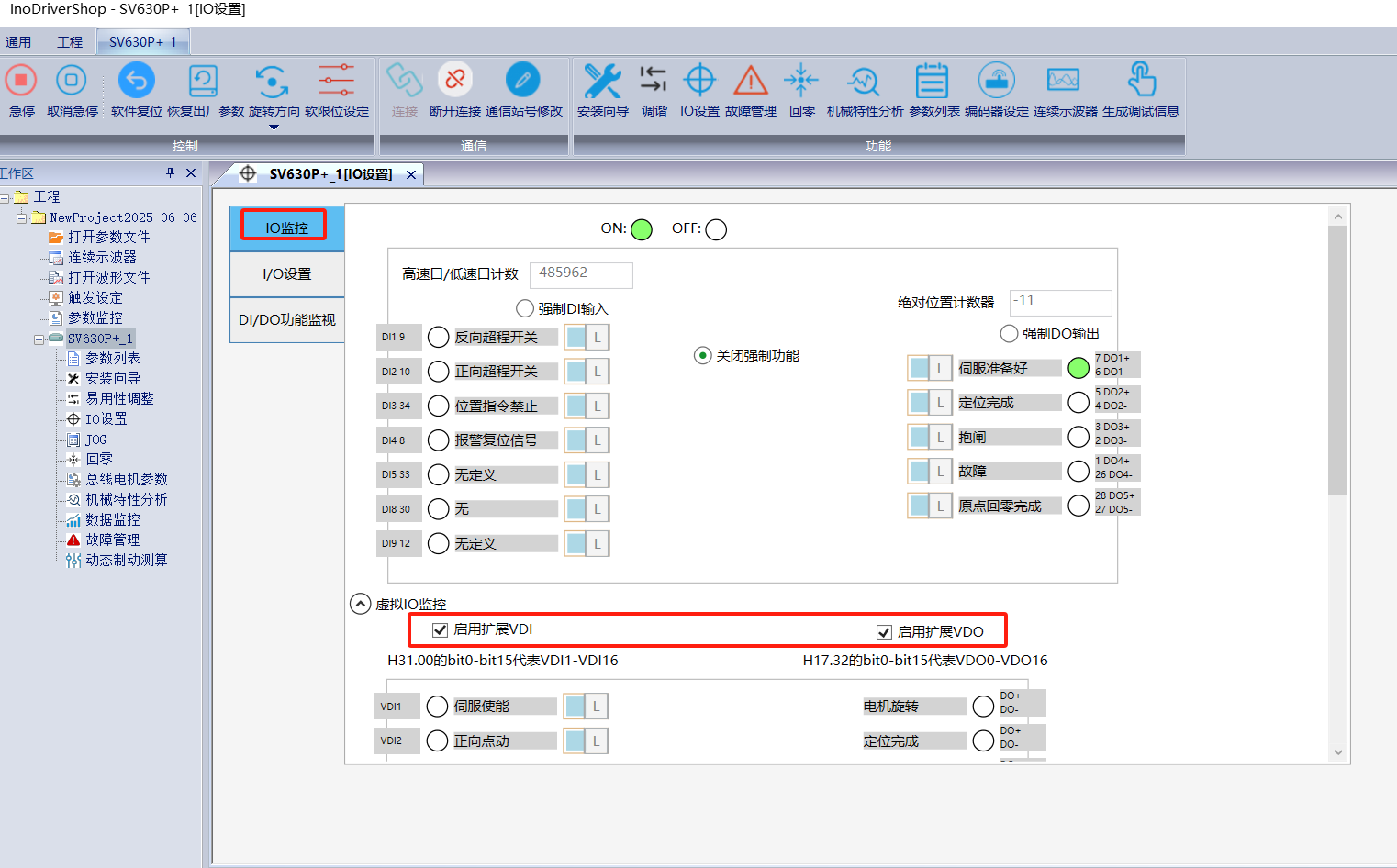
点击IO监控,检查设置是否完成,勾选启用扩展VDI和VDO
参数设置:点击工作区的参数列表,会显示轴1,有H00到H31参数栏;按下图依次进行配置;如果有参数无法写入跳转至常见问题解答。
H02.01配置为1

H05.00配置为2
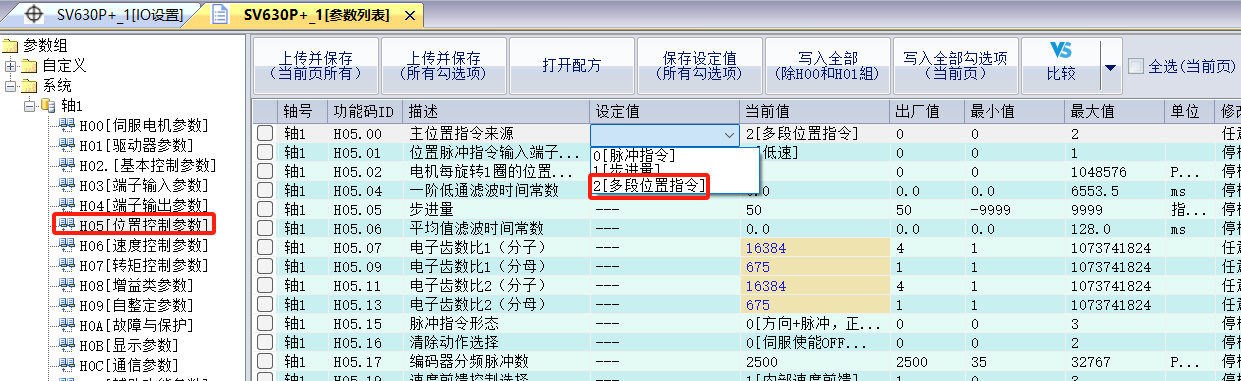
H11.00配置为0;H11.04配置为1。

H12.00配置为0

零点调整
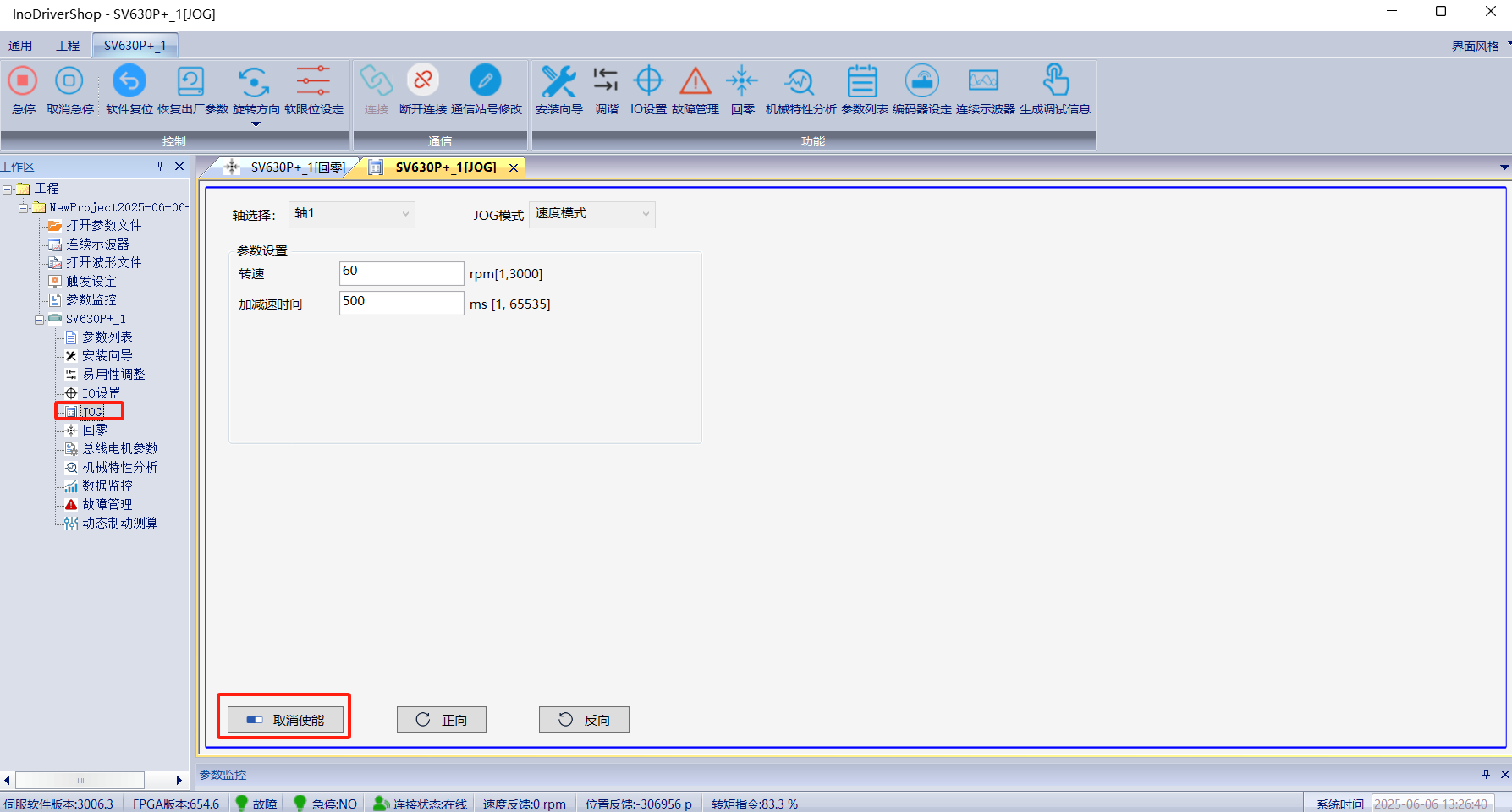
首先在上述配置好后,在工作区找到JOG,上伺服后可以控制升降柱进行运动。
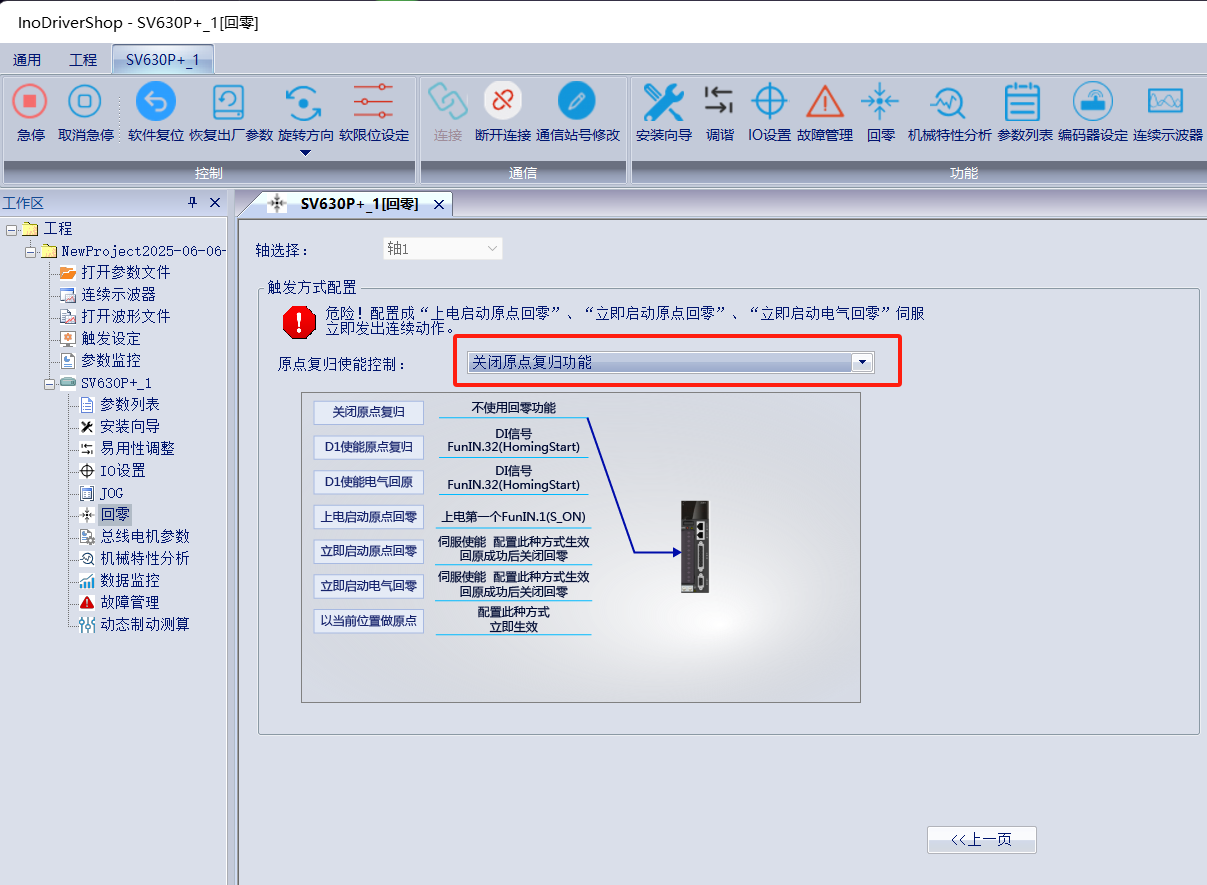
当运动至合适的零位位置后,工作区点击回零,点击下一页;然后继续点击下一页。
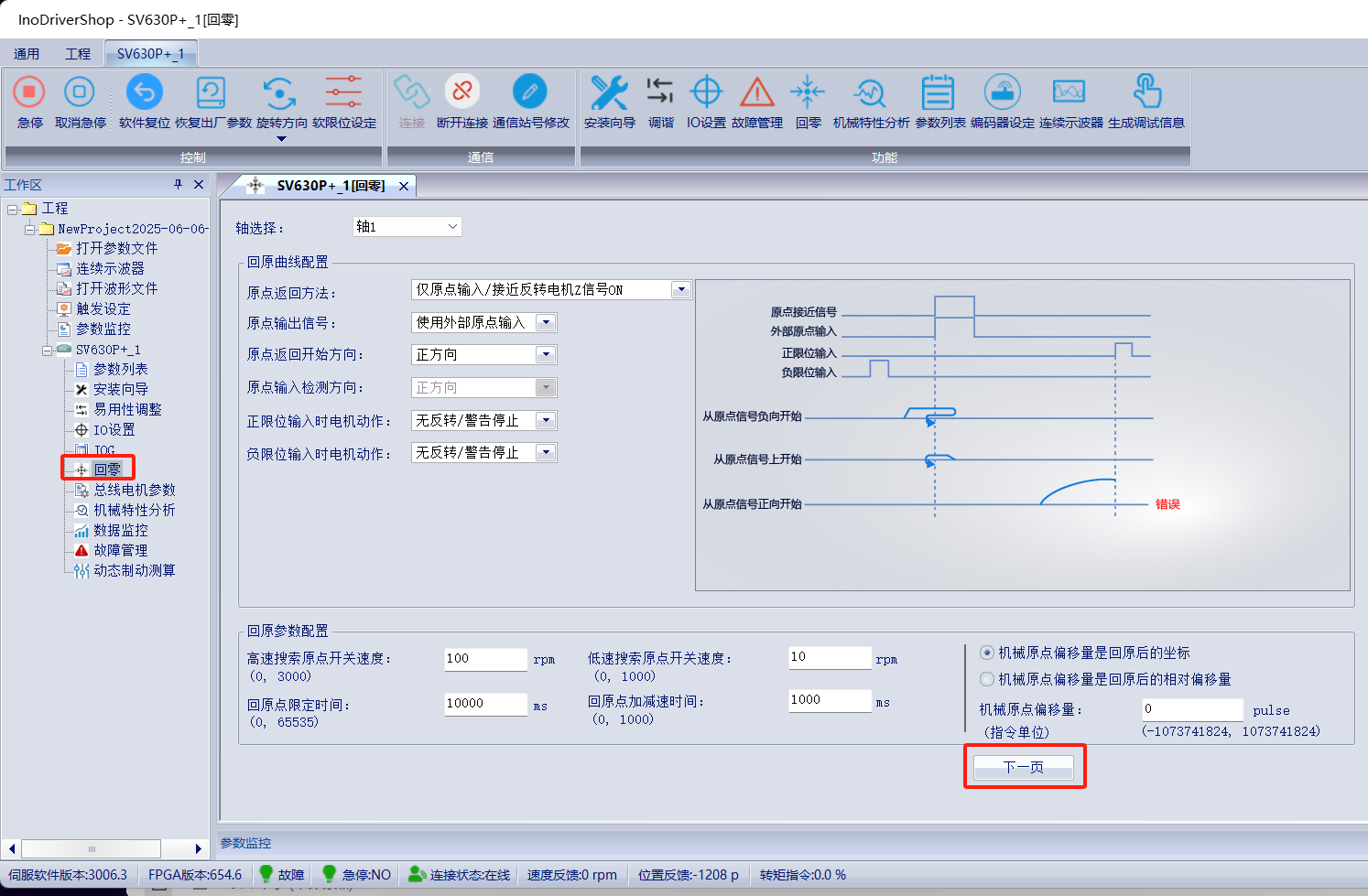

先选择以当前点为原点
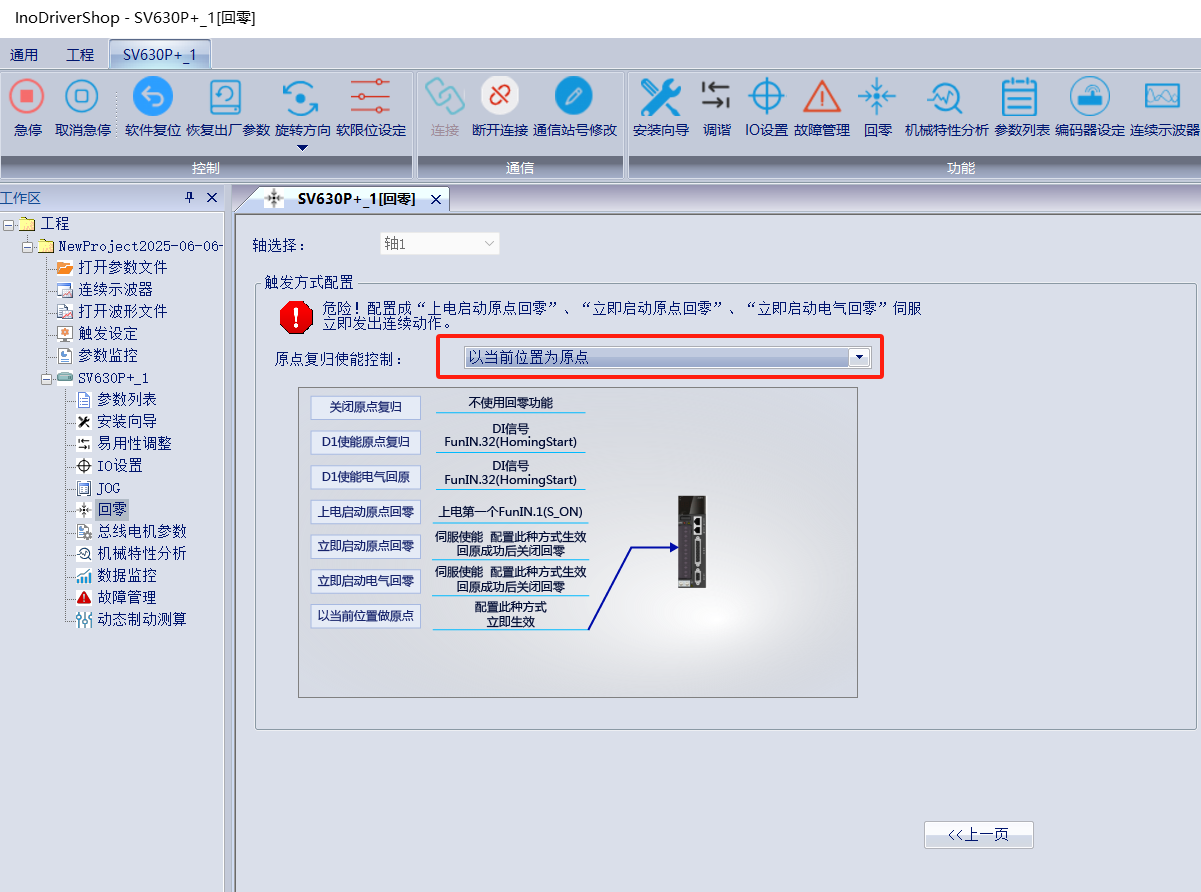
再关闭原点复位使能
电子齿轮比计算:
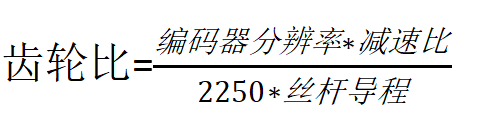
这里的2250是码垛插件约定发送2250个脉冲为1mm
工作区点击安装向导,可以看到该编码器识别出位18为绝对值编码器;上公式中编码器分辨率则为2的18次方=262144。
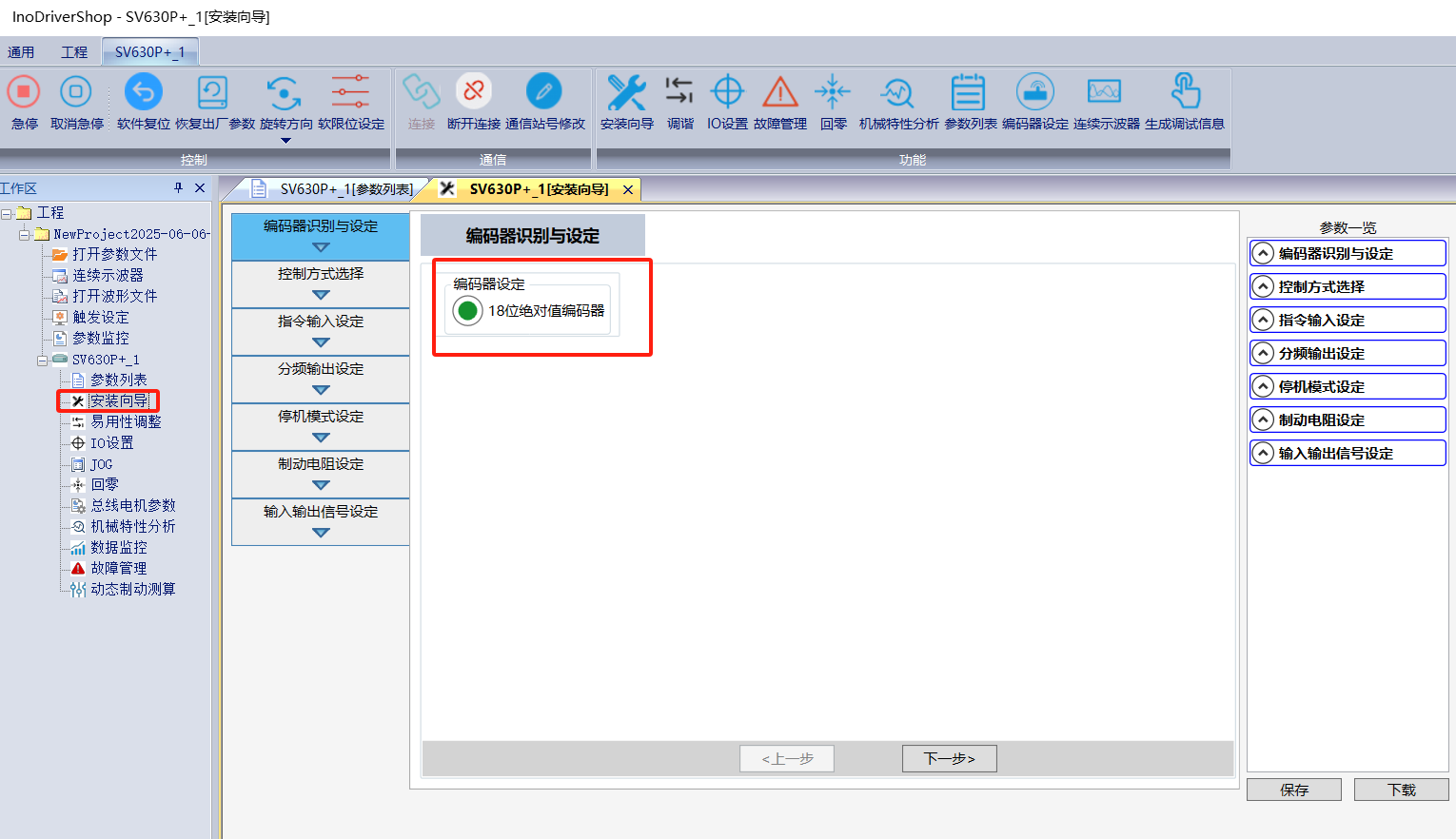
将计算出的值输入到参数列表的H05.07-H05.13。写入

2.3通讯转换模块设置
通讯转换模块只适配过两个品牌:艾莫迅和有人。一般最多只会用一个通讯转换模块。如果升降柱支持modbus通讯(如力纳克),则不需要通讯转换模块。
2.3.1艾莫迅模块
登录 192.168.1.12后按下图进行配置。


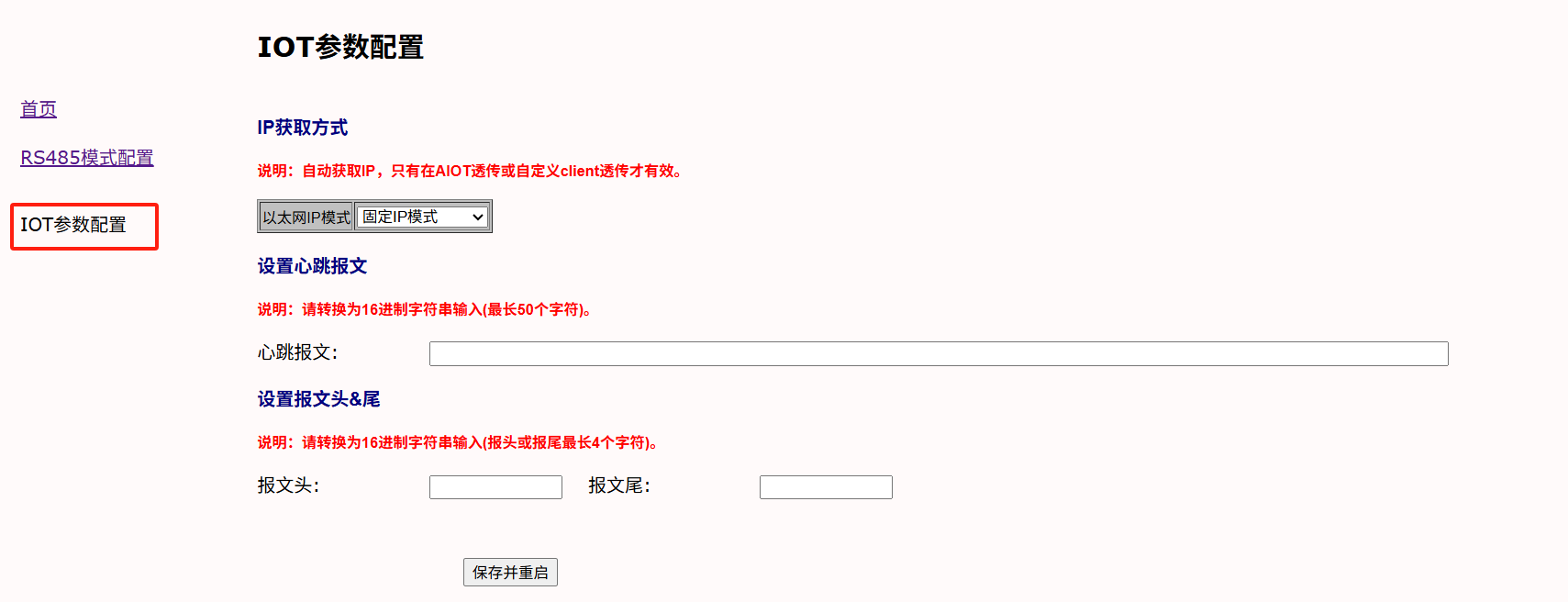
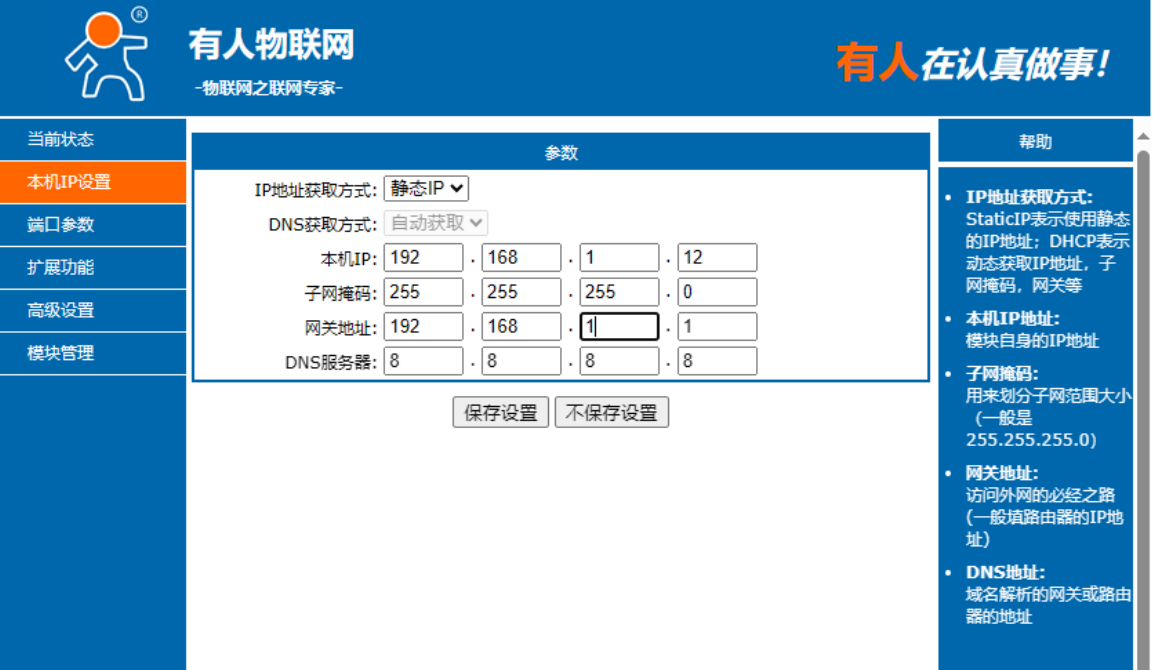
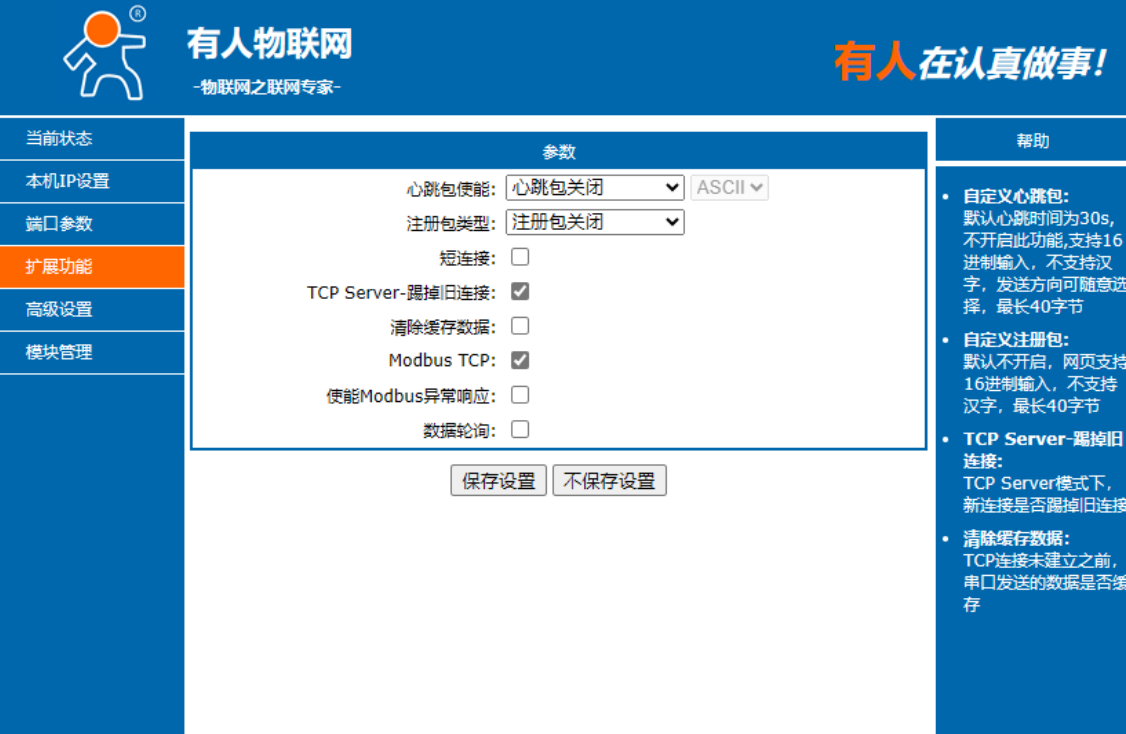
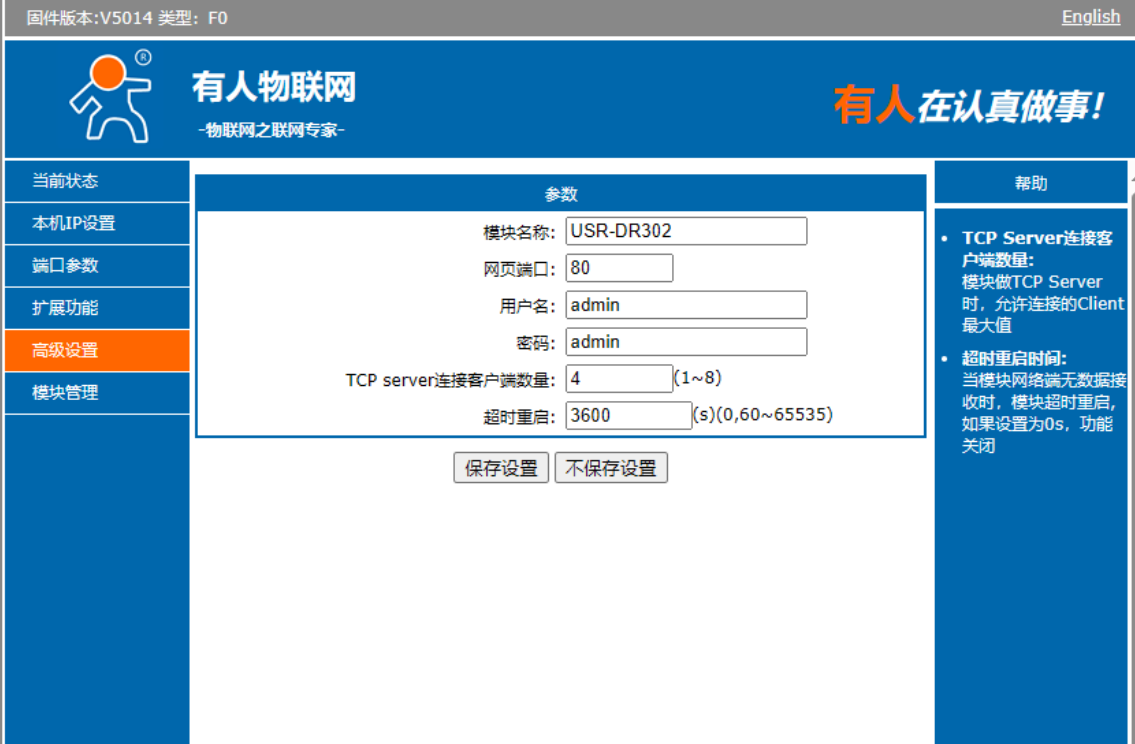
2.3.2有人模块
串⼝服务器默认为192.168.0.7,账号admin,密码admin

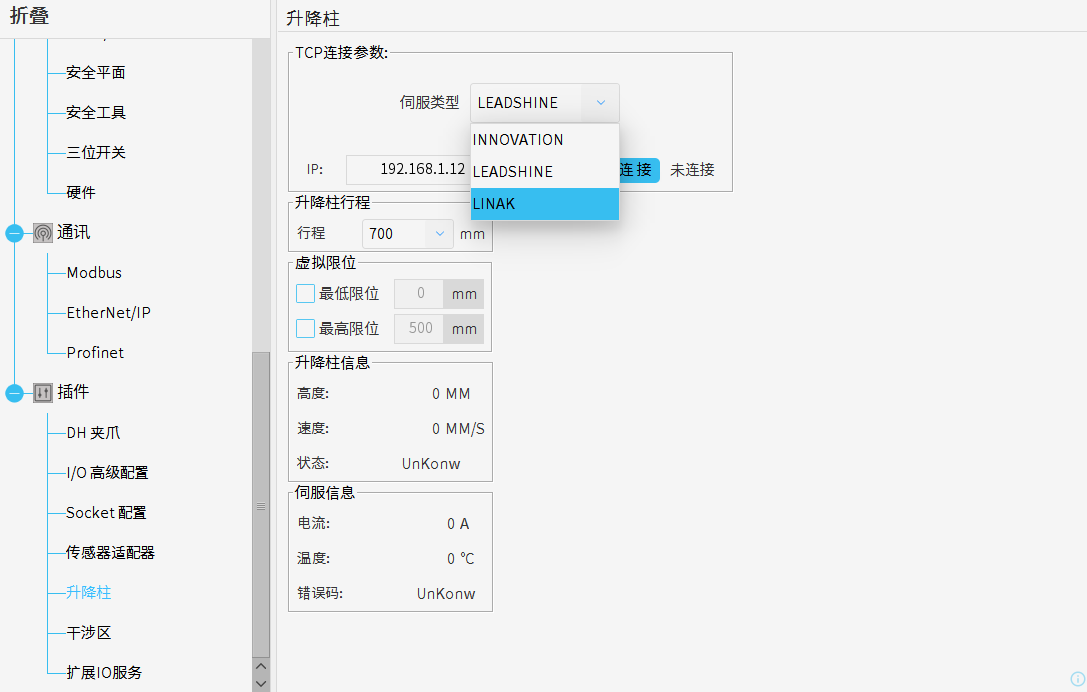
2.4机器人配置
安装升降柱插件后,选择对应的升降柱/伺服控制器即可连接;连接后下次开机自动连接。
升降柱插件请联系艾利特工程师获取。
3. 常见问题解答
3.1非使能状态如何进入
如果在修改伺服控制器参数时,警告要确保进入非使能状态则在下图修改使能。
H31.00如果为9或1为使能状态;写入0则下使能。

3.2伺服控制器还支持其他的吗
伺服控制器目前只适配了汇川,其他品牌请自行适配。
3.3伺服控制器为什么不上电
如果是整机购买,或者是完全参照我们电气接线,在机器人不上电的情况下伺服控制器是没有电的。























