
















CS机器人轨迹复现功能的使用
2026-01-04
1. 简介
本文档将介绍CS机器人如何使用轨迹复现功能----拖动机器人时,需要记录机器人运行轨迹,运行任务时复现轨迹。
2. 操作流程
1、点击导航栏任务,右侧点击复合下拉选中轨迹记录,点击左下角开始记录,然后按下示教器背部拖动按钮拖动机器人;

2、 拖动结束后点击停止记录即可;
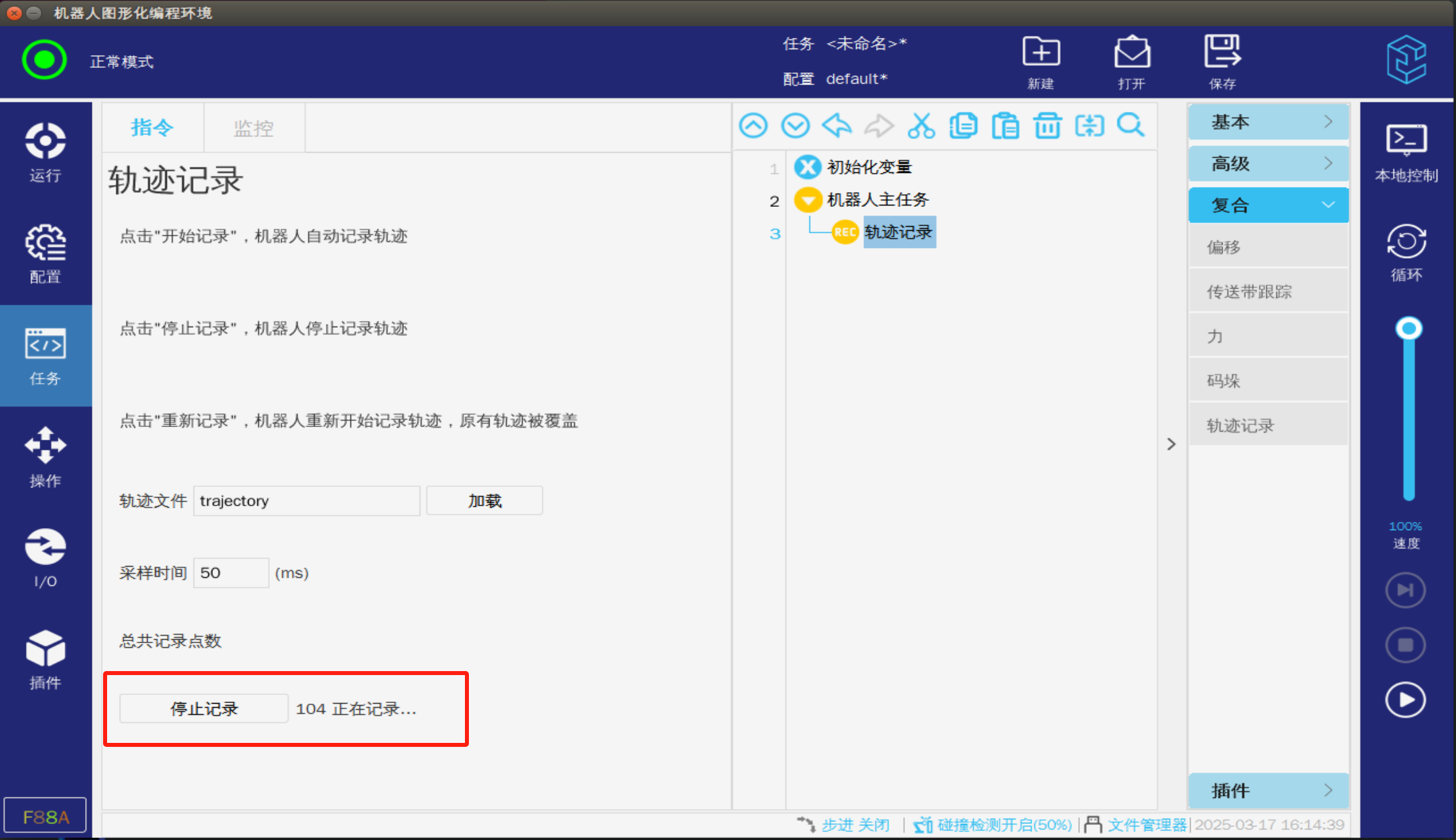
3、 记录完成,点击启动按钮即可复现轨迹记录情况;

3. 常见问题解答
1、 轨迹记录最大可记录141330个点位;
2、 轨迹记录时发生报警、下电等机器人状态、安全状态改变时自动结束记录;
3、 轨迹文件默认名称为trajectory,如果输入或默认名称轨迹文件已存在时将自动命名,命名格式为trajectory_1 trajectory_2一直累加;
4、 轨迹文件可选择已有的轨迹文件;
5、 重新记录时将覆盖原有文件内容;























