
















CS机器人E12S21报警处理
1. 简介
E12S21:{joint} 关节驱动器过流
1. E代表:大的报警类别,S代表:内部的小类别
2. 12代表:伺服报警
3. 21代表:{joint} 关节驱动器过流(如下图)
2. 导致故障发生的原因
1. 负载、加速度参数设置不正确
2. 负载过大,超出负载特性曲线
3. 由于发生撞击、关节抱闸未打开等造成的机械卡死现象
4. 关节驱动器硬件损坏
5. 软件无保护(2.10之前版本)
注:基本为2.10版本之前撞击导致该类问题发生
3. 排查方向及处理方式
工具:万用表
3.1排查
1. 将万用表打到蜂鸣档,使用红黑表笔测量短出线/延长线的48V和GND。听是否有蜂鸣声,确认关节是否短路。(有蜂鸣声,48V与GND导通,表示短路)
2. 确认短路后,根据对应的报错代码打开对应关节的端盖。
3. 端盖打开后,拔出48v与GND线缆
4. 使用万用表旋转至蜂鸣档,测量48V与GND,看是否短路(有蜂鸣声,48V与GND导通,表示短路)下图为正常阻值:

5. 使用万用表旋转至蜂鸣档,测量48V与电机线,看是否短路,查看阻值是否在千欧以上(千欧以上表示ok),(有蜂鸣声,48V与电机线导通,表示短路)下图为正常阻值:

6. 使用万用表旋转至蜂鸣档,测量GND与电机线(或螺柱与电机线),看是否短路,查看阻值是否在千欧以上(千欧以上表示ok)(有蜂鸣声,GND与电机线导通,表示短路)下图为正常阻值:

7. 测量异常关节上行之间线缆,使用红黑表笔测量线缆48V与GND,听是否有蜂鸣声,确认上行关节是否短路。(有蜂鸣声,48V与GND导通,表示短路),如无蜂鸣声则上行关节无短路,反之则需按2-6步骤继续排查。(下行与上行的也是一样的排查方式。)
3.2处理方式
(1) 现场处理方式:更换故障关节
(2) 返厂维修:更换驱动板
4.注意事项
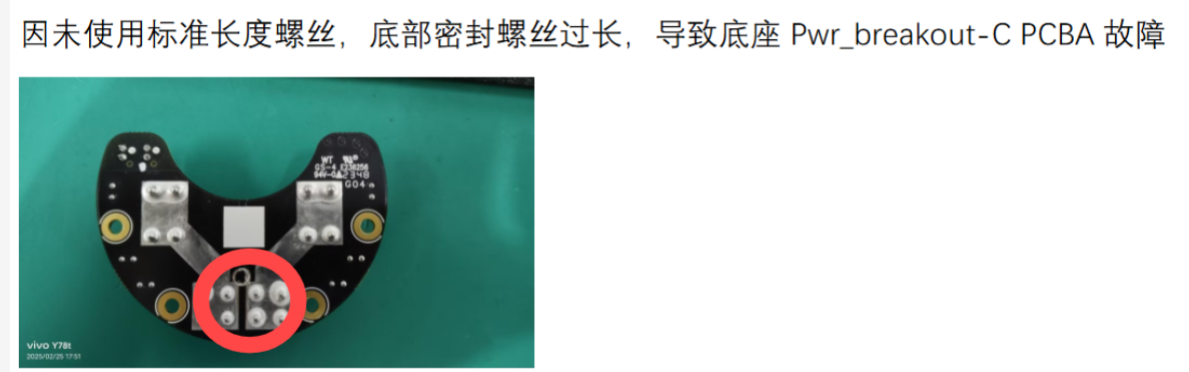
1. 底座密封螺丝如果过长,可能会使底座里的48V与GND短路,一般出厂时已密封好,客户拆卸后如果更换了该螺丝需要确认清楚。(如下图)(螺丝型号:M5X8)
2. 如2.10的之前的软件版本,必须升级到2.10之后的,避免因为软件防护原因导致烧件的事情发生
3. 升级到2.10之后,无过流问题产生


























