
















CS机器人E12S903报警处理
1. 简介
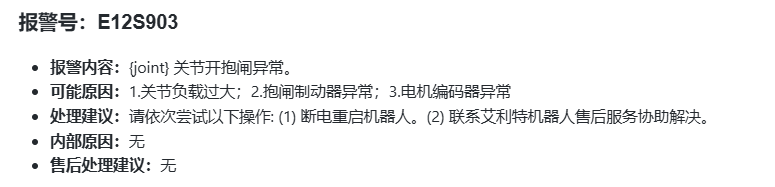
E12S903:{joint} 关节开抱闸异常
1. E代表:大的报警类别,S代表:内部的小类别
2. 12代表:伺服报警
3. 903代表:{joint} 关节开抱闸异常(如下图)
2. 导致故障发生的原因
1. 关节负载过大:
● 可能的原因(1):故障姿态下关节受力较大 或者关节活动范围受限(碰撞了)
● 可能的原因(2):负载较重,在某些位姿下会卡死
2. 抱闸制动器异常
● 可能的原因:电磁抱闸/电磁铁异常或卡死
3. 电机编码器异常
● 报故障时,通常臂体有剧烈振动。使用“反向驱动”推动到新位置后,再次尝试开抱闸,故障依旧
4. 霍尔信号异常,但是硬件无法检测出错误
注:已出现的问题基本为第4种原因
3. 排查方向及处理方式
1. 关节负载过大处理方式:
● 先启用“反向驱动”,将臂体推动到新的位置,再尝试开抱闸。
2. 检测抱闸制动器是否存在异常
● 先启用“反向驱动”,将臂体推动到新的位置,再尝试开抱闸。
● 电磁铁抱闸结构:检测电磁铁本身是否存在机械变形或卡死(肉眼观察)
● 电磁抱闸结构:观察电磁抱闸是否打开或者是否存在异常现象(看不到开抱闸的实际状况)
处理方式:返厂或现场更换关节
3. 检测电机编码器是否存在异常
● 产测模式下,强制上电,推动关节,检查对应关节0X67的值是否有变化(部分有用)
导致原因(1):INC排线损坏
导致原因(2):INC组件异常
处理方式:返厂或现场更换关节
4. 霍尔信号异常
● 测量方式:本体上电,拍急停,使用万用表测量霍尔线中间三根线与外壳之间的电压(正常情况下,三根线的电压值是不一致的,不会同时存在三个0V或者3.3V,故如三个电压一致则为异常,反之OK。(电平信号:0和1)。
屏蔽方式:
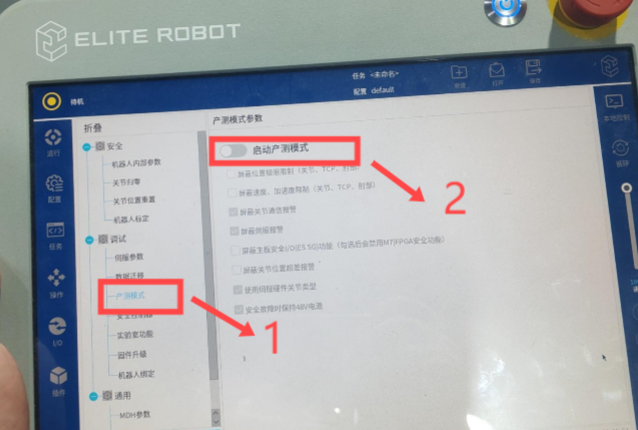
● 进入专家模式,选择”产测模式” ,并点击”启动产测模式”,如下图。
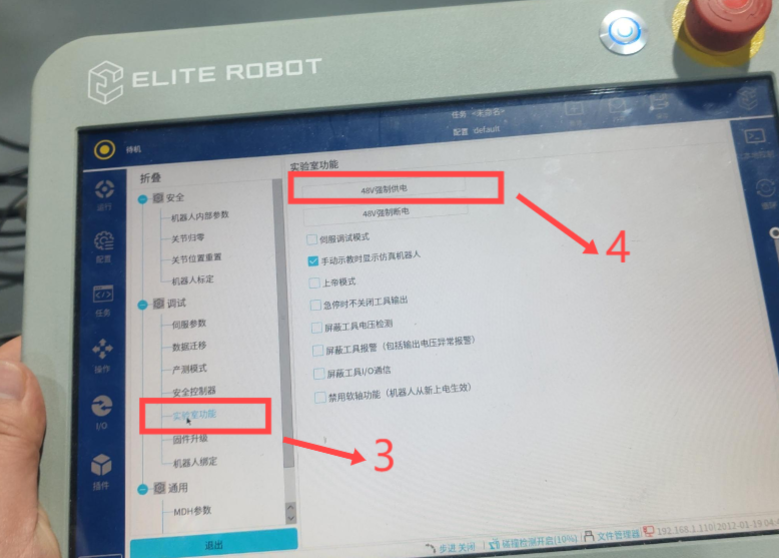
● 选择“实验室功能”,并点击“48V强制供电”,如下图。
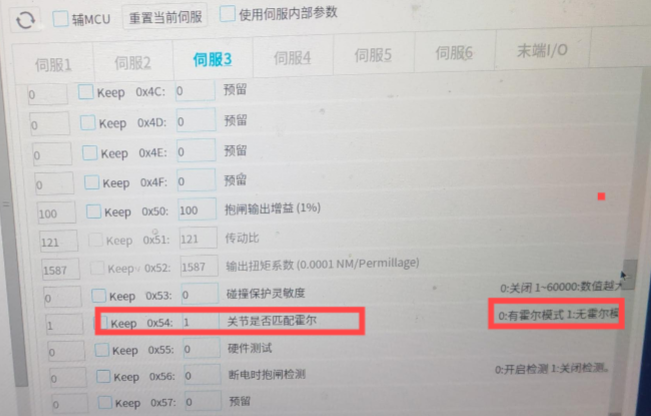
● 找到对应的关节,屏蔽0x54=1(0:有霍尔,1:无霍尔),0X03修改为5保存。
处理方式:
现场处理方式:更换故障关节或屏蔽霍尔
返厂维修


























