
















CS机器人在产测模式下回到打包位操作方法
1. 简介
机器人在使用过程中,可能会出现撞机或者其他原因引起的轴伺服损坏导致机器人无法正常上电,这个时候机器人就无法回到打包位打包,这篇文档主要介绍如何在这种情况下将机器人回到打包位进行打包。
2. 操作流程
2.1在产测模式下将机器人移至打包位姿态(以肘关节伺服损坏为例)
第一步:在图-1红框标记处点击5-8次就会出现请输入密码界面,输入密码:elibot后 就会进入图-2界面。

图-1
第二步:在专家模式下,选择产测模式,启用产测模式,勾选屏蔽伺服报警。如图-2红框标记所示。
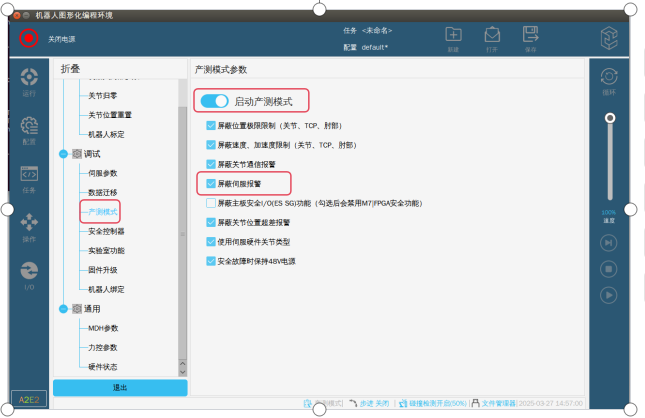
图-2
第三步:退出专家模式,这个时候因为伺服报警已经屏蔽了,所以机器人可以正常上电了。如图-3所示在配置界面→选择打包位→点击移至默认打包位就可以进入图-4界面。

图-3
第四步:一直按着自由移动按钮,如图-4红框所示,机器人无故障的轴就会回到打包姿态,有故障的轴不会运动。(需要注意的是因为机器人其中一个轴或多个轴有故障时,有故障的轴是不会运动的,所以在移至打包位时将机器人放在空间比较开阔的地方操作且运行速度要慢,防止机器人在运动过程中碰撞到其他障碍物或者机器人关节相互碰撞)以机器人肘关节有故障为例,机器人运行到打包位时肘关节是不会运动的,如图-5所示姿态就是肘关节在-90度时运到到打包位的姿态,图-6就是机器人正确的打包位姿态。通过图5与图6对比可以发 现,机器人肘关节也就是三轴需要逆时针旋转270度才能回到正常打包位。

图-4
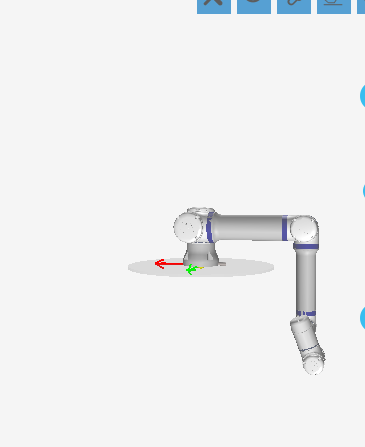
图-5
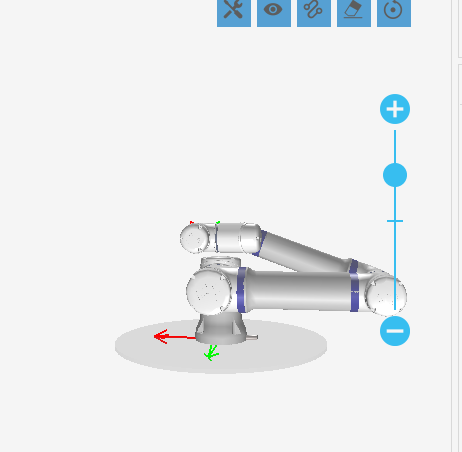
图-6
第五步:在机器人无故障的轴都回到打包位之后,按照第一步和第二步的操作将”屏蔽伺服报警“勾选去掉,然后把产测模式关掉,将机器人控制柜断电,然后通过抱闸释放工具手动将机器人肘关节逆时针旋转270度回到打包位。下方链接是抱闸工具使用手册。
TS20241201KA-CS抱闸盒用法-CS技术文档.pdf
3. 常见问题解答
1.使用抱闸工具时最好是两个人一起操作,一个人负责操作抱闸工具,一个人负责抬着有故障的关节,防止关节因刹车释放从而掉落。


























