
















CS机器人不运动排查方法
2025-09-09
1. 简介
在客户日常操作中,经常会遇到机器人不动作的情况,这边文档主要用于排查不动作原因方便客户日常使用。
2. 操作流程
1. 查看左上角运行状态。
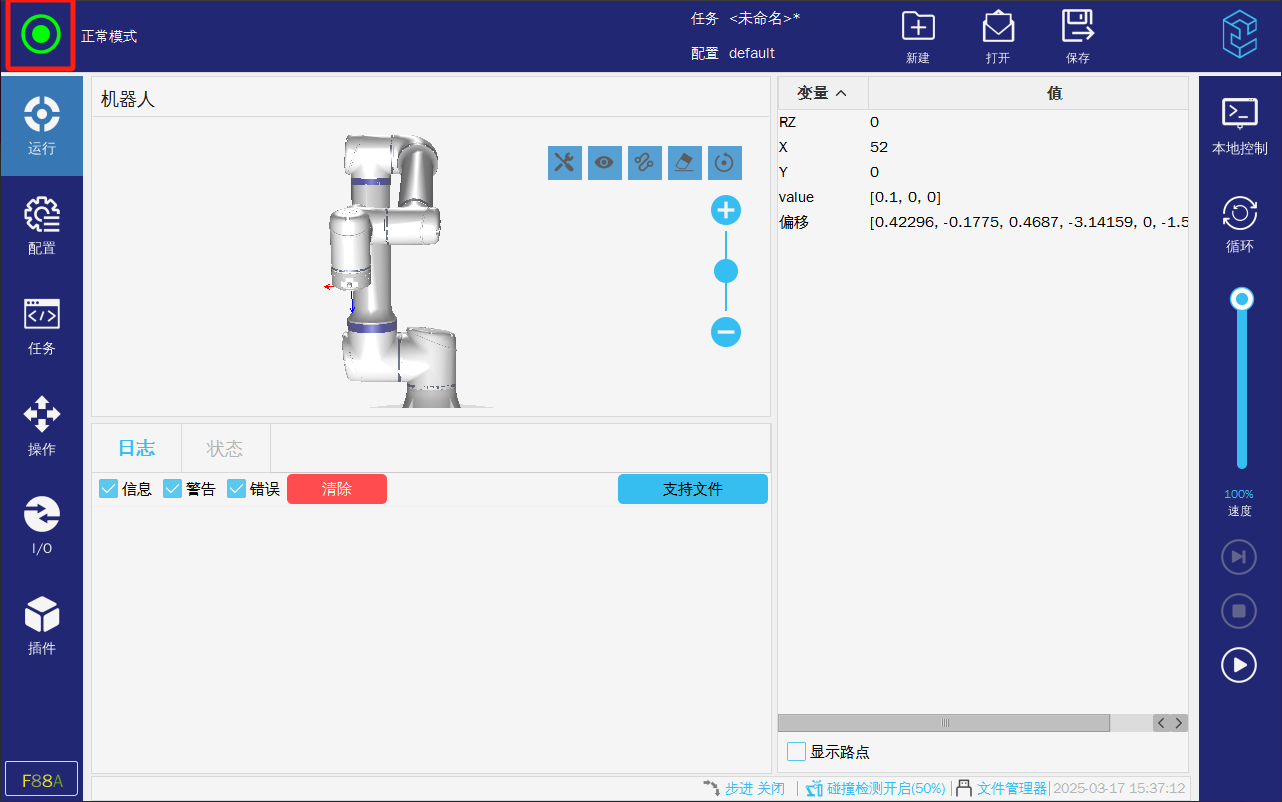
1. 可以先根据颜色确认机器人是正常状态(绿色;正常状态,黄色;未释放抱闸/保护性停止,红色;报警/“关闭电源“状态)
需要确保机器人是处于”绿色状态“
2.运行模式,如果是正常模式则需要让任务运行(左上角处于“运行中“),则机器人才会根据任务来执行需要动作。
2. 查看程序指针。

在处于任务运行中的时候机器人如果没有任何动作也无报警可以查看对应任务的程序指针,通过指针查看当前程序执行在哪一行(比如以上程序目前是在处于等待指令行),由此来判断不动作的原因。位置1是程序指针,如果找不到位置1的程序指针,可以点击位置2,该位置是表示跟踪到程序指针位置1.
如
3. 查看是否添加断点
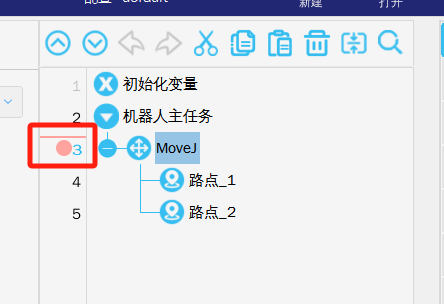
如果不小心添加添加了断点,则可以在点击一下断点图片位置把断点取消叫就可以运行了。
4. 查看系统配置或IO高级插件配置的暂停,停止信号。
4.1. IO输入输出
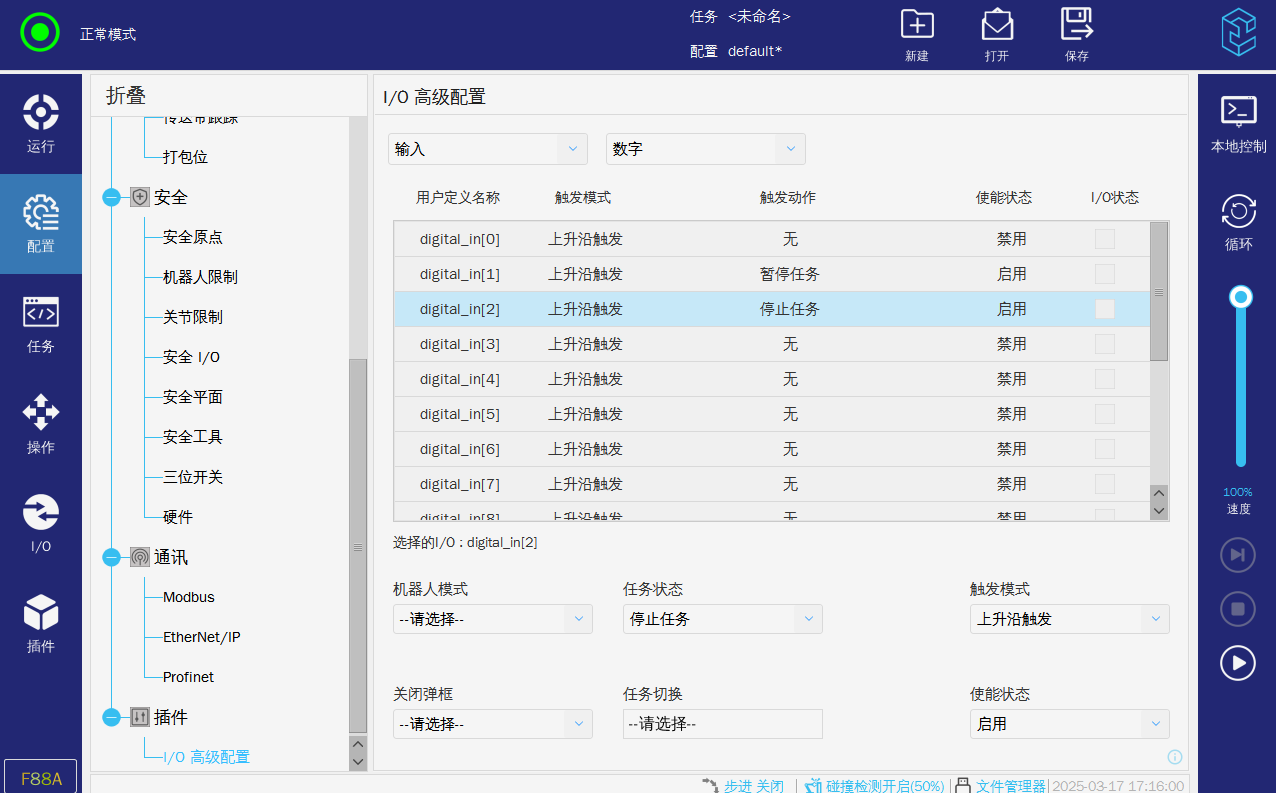
图1-1
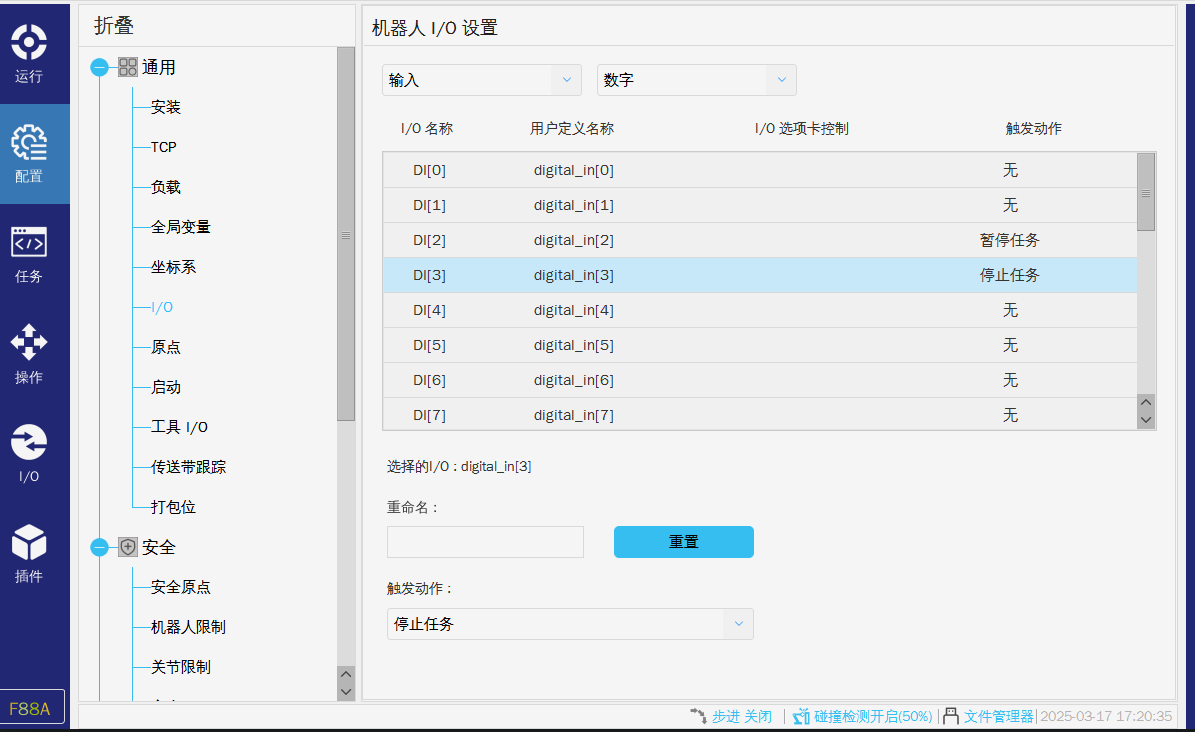
图1-2
在使用硬接线的交互方式时,运行过程中如果无故暂停或者停止,可以查看以上两张图片是否有配置导致任务停止或者暂停。
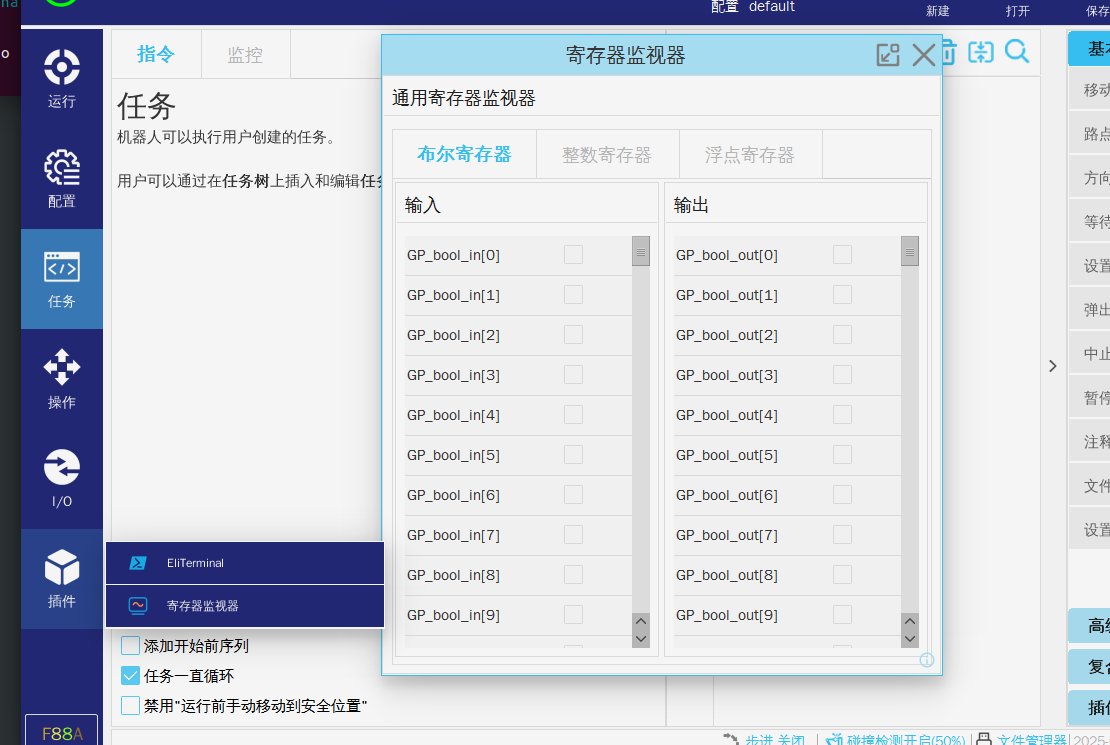
4.2. 布尔寄存器

图1-1
在使用寄存器做交互的时候,运行过程中如果无故暂停或者停止,可以查看以上图片是否有配置导致任务停止或者暂停。
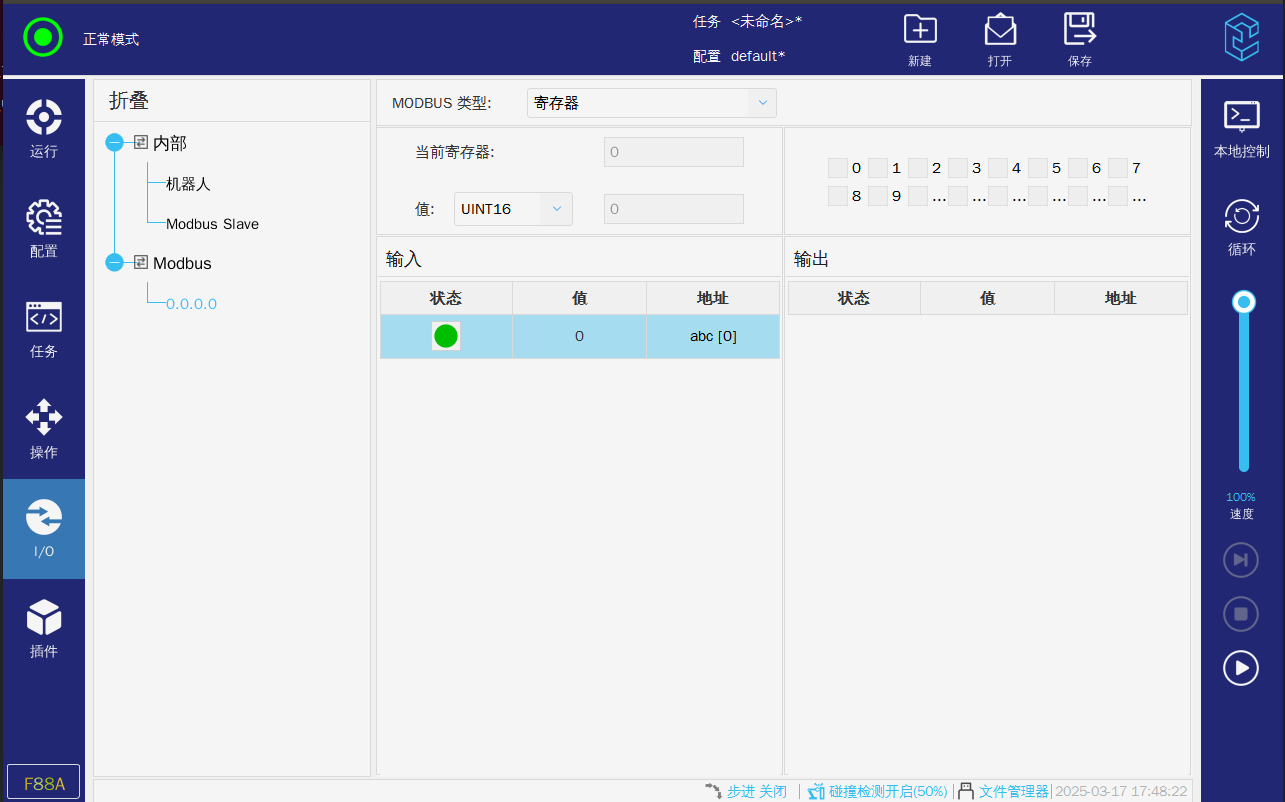
5. 查看IO信号,modbus,通用寄存器信号。

2-1-机器人接线-IO信号

2-2-modbus从站
2-3modbus主站
2-4-PROFINET/ETHERNET-IP
如果程序流程指针不动或者反复跳转可以通过以上界面查看,是否是信号导致的程序没有进入动作流程。


























