CS机器人维护检验流程
1. 简介
适用CS系列机器人本体、示教器维护
主要目的是帮助用户安全地执行与服务相关的操作和故障排除、控制柜
2. 检验流程
2.1、表面清洁
如果在控制柜或机器人本体上观察到灰尘/污垢/机油,可以用蘸有清洁剂的抹布擦拭干净。
清洁剂:水、异丙醇、10%的乙醇或10%的石脑油。
在极罕见情况下,可在关节处看到 少量的润滑脂。这并不影响关节的指定功能或使用寿命。

控制柜 机器人本体
2.2、控制柜
2.2.1 安全功能检验
突出强调机器人安全功能,建议每月进行测试,以确保功能正确。 必须执行以下测试:
1. 测试示教器上的急停停止按钮功能:
● 按下示教器上的紧急停止按钮;
● 观察机器人停止,并关闭关节的电源;
● 再次启动机器人。
2. 测试自由驱动模式:
● 根据工具规格,拆下附属装置或设置工具中心点(TCP)/有效负载/CoG;
● 按住示教器背面的黑色Freedrive(自由驱动)按钮,将机器人设置为自由驱动模式;
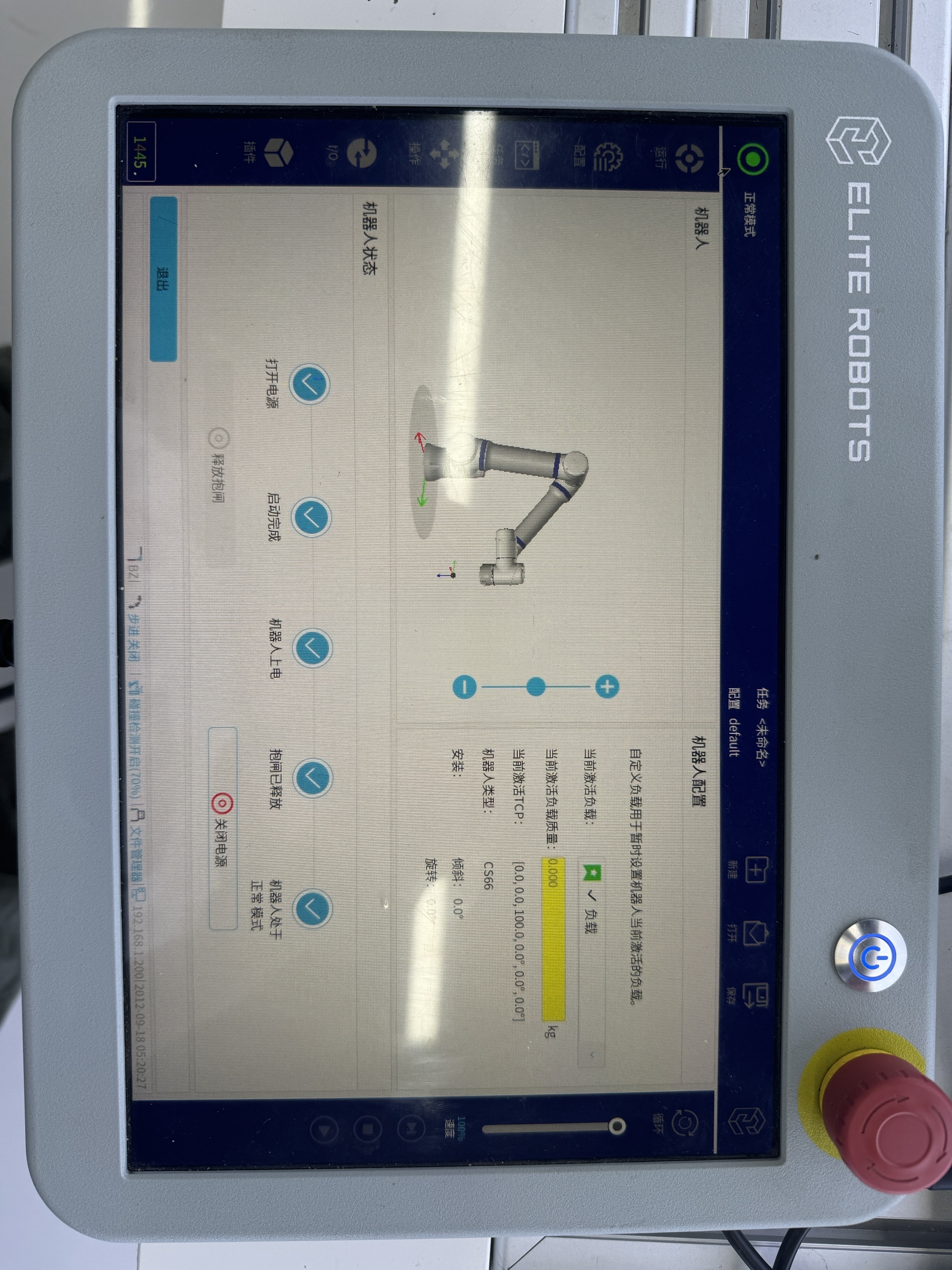
机器人进入正常模式

按住自由驱动按钮
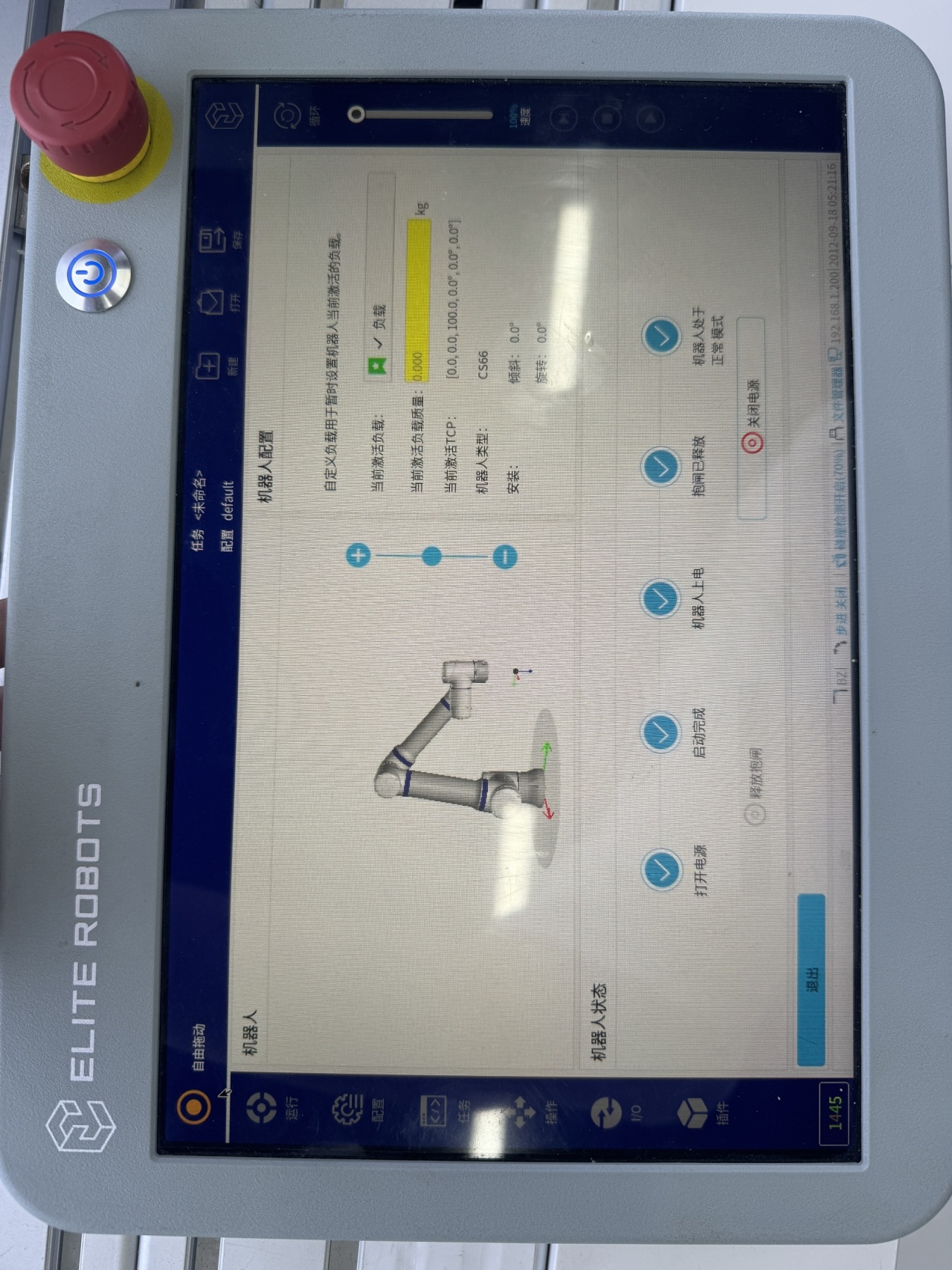
进入自由拖动模式
● 将机器人移动到水平伸展到其工作空间边缘的位置;
● 按住自由驱动按钮的同时,监控机器人在没有支撑的情况下保持其位置。
● 手动拖动检验各轴在自由驱动下的顺滑度,检查是否报警或卡顿情况;
3. 测试反向驱动模式:
大负载机器人测试时建议人数为两人或以上,如果机器人接近障碍物,在测试前,可以使用BACKDRIVE(反向驱动)功能,将机器人移动到安全位置。
● 按ON(开启)启用电源,状态将变为“待机”;
● 按住“自由驱动”->状态将变为BACKDRIVE(反向驱动);
机器人待机状态
按住示教器背面按钮,进入运行-状态
● 像自由驱动一样,用手移动机器人;
● 在反向驱动模式下,至于单个关节上的制动器会在该关节受外力移动时被释放,已 经释放的制动器,在自由驱动按钮释放之前会一直保持释放状态。与自由驱动模式 相比,机器人移动起来有些“笨重”;
● 请单独测试每个关节,以确保制动器按预期释放。
4. 验证配置内的安全设置:
● 验证机器人的安全设置符合机器人安装的风险评估。
5. 测试其他安全输入和输出仍运作:
● 检查哪些安全输入和输出处于激活状态,并测试可否触发。
2.2.2 目视检验
1. 控制柜内部
● 从控制柜上断开电源线;
● 检查安全控制板上的端子是否正确插入,且电线完好;
● 检查主机板上的所有连接以及安全控制板与主机板之间的连接;
● 检查控制柜内部是否有污垢/灰尘,目视需要,使用防止静电放电的真空吸尘器清洁。
● 检查示教器线缆,主电源线
● 检查并测试控制柜中的端子
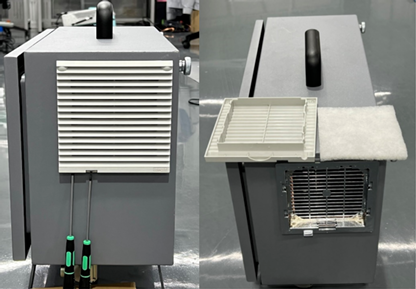
2. 检查并清洁控制柜上的空气过滤器
● 控制柜有两个过滤器,每侧各安装一个;

● 从控制柜中取出过滤器,并用低压空气彻底清洁;
● 根据需要,更换过滤器;
● 轻轻地拆下外部塑料框架,并维护过滤器。
2.3、机器人本体
2.3.1 功能检验
功能检验的目的是确保螺钉、螺栓、工具和机器人本体没有松动。
1. 检查端盖螺丝
2. 检查机器人本体安装螺栓
3. 检查工具安装螺栓
4. 检查连接关节的螺栓/螺钉
2.3.2 目视检验
1. 将机器人本体移至原点位置(如果可以);
2. 关闭控制柜,并断开其电源线;
3. 检验控制柜与机器人本体之间的电缆是否有任何损坏;
4. 检验橡胶环是否磨损和损坏:
如果橡胶环磨损或损坏,请进行更换。
5. 检验所有关节上的端盖是否有任何裂纹或损坏:
如果关节端盖开裂或损坏,请进行更换。
6. 检验盖子的螺钉是否就位并适当拧紧:
目视需要,更换螺钉,并适当拧紧;
节端盖上的螺钉的正确扭矩值为0.5Nm。
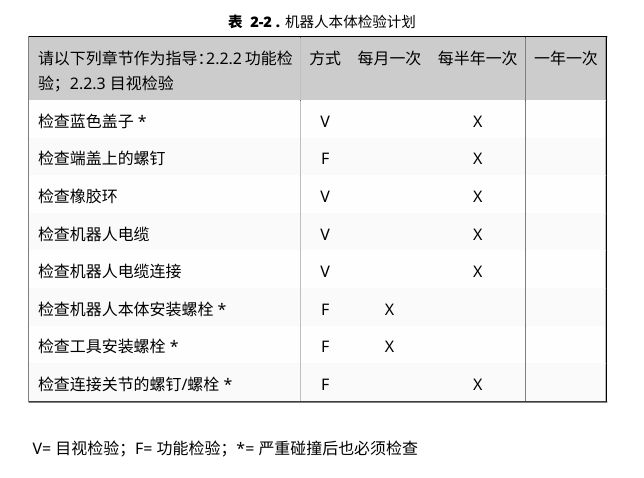
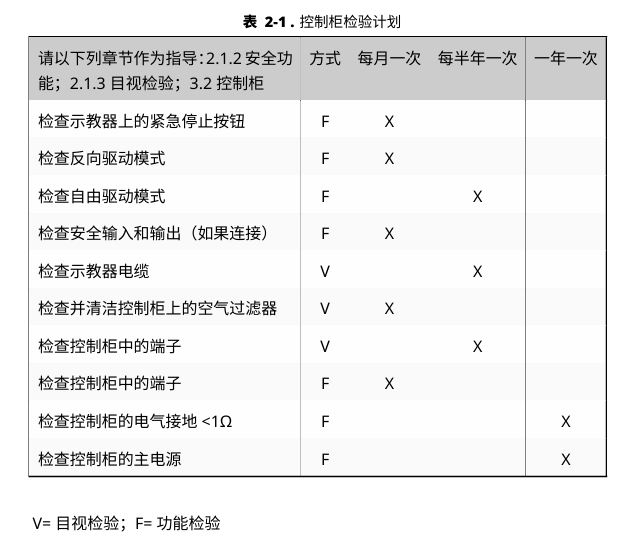
3. 检验计划表
1. 控制柜
2. 机器人本体