
















CS机器人E12S500报警处理
1.简介
1. E12S500:伺服报警,[主]肩部 主辅之间通信初始化异常
2. E代表:大的报警类别,S代表:内部的小类别
3. 12代表:伺服报警
4. 500代表:主] {joint} 主辅之间通信初始化异常,(如下图)
其它报警代码也可以同样理解,具体报警代码及处理方式请参考FAQ,地址链接
CS 常见售后相关问题解答(FAQ) - Powered by MinDoc
2. 导致故障发生的可能原因:
1. 主辅内部伺服数据混乱(原因未知)
2. 撞击或多次撞击后主辅芯片损伤或完全损坏
3. 升级期间异常断电
3. 排查方向及处理方式
3.1. 共识
(1)轴号对应关节名称-伺服版本:J0(基座)-伺服1, J1(肩部)-伺服2, J2(肘部)-伺服3, J3(手腕1)-伺服4, J4(手腕2)-伺服5, J3(手腕3)-伺服6.
(2)CS系列所有辅MCU数据都是一样的
3.2. 排查
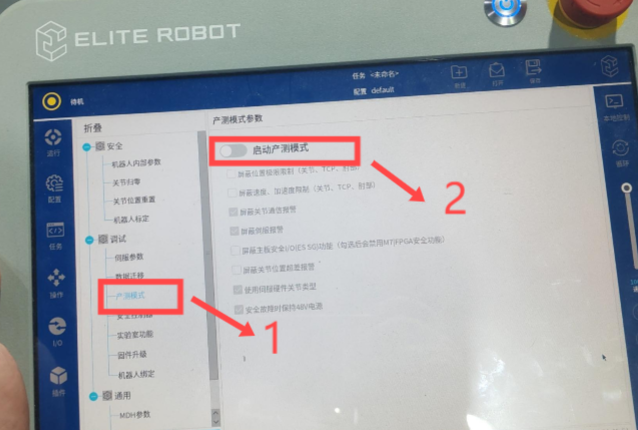
(1)进入专家模式,选择”产测模式” ,并点击”启动产测模式”,如下图。
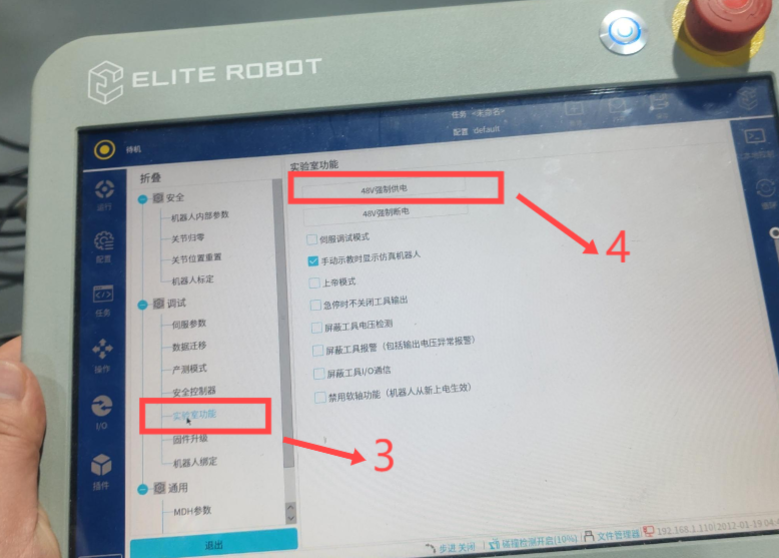
(2)选择“实验室功能”,并点击“48V强制供电”,如下图。
(3)辅MCU查看方式:选择“伺服参数”,点击“对应轴”,并勾选“辅MCU“。
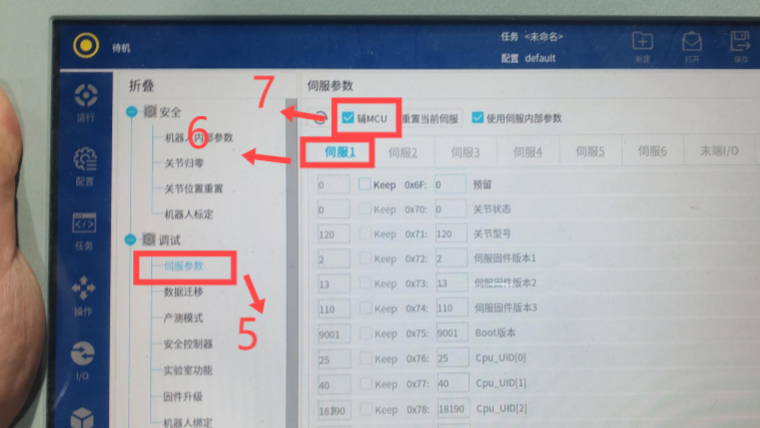
(4)下拉至”72,73,74列”,如伺服版本皆为“0”,则伺服固件异常。下图为辅MCU正常时的版本数据。
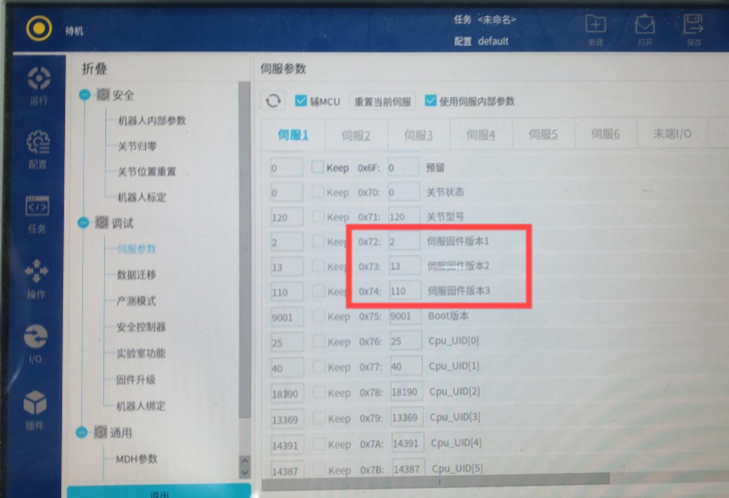
(5)主MCU与辅MCU排查方式一样,不勾选"辅MCU",操作步骤参考辅MCU操作步骤即可。
4. 处理方式
(1) 临时处理方式:将0X06修改成0,0X03修改成5,并勾选关节内部参数。
(2) 正式处理方式:使用U盘,固件升级辅MCU,辅MCU升级步骤如下:
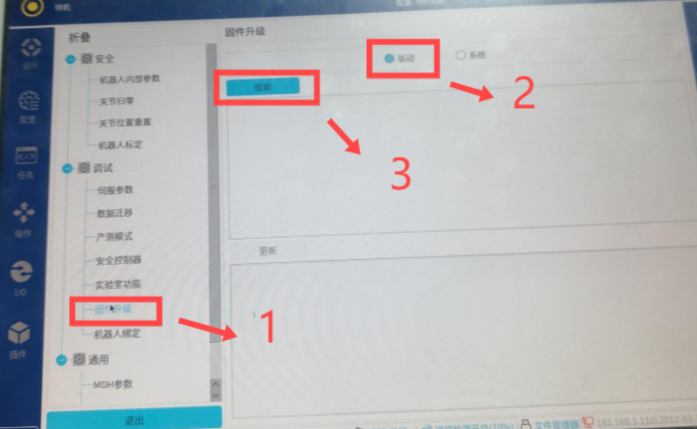
● 进入专家模式,选择“固件升级”,选择“驱动”,点击“搜索”
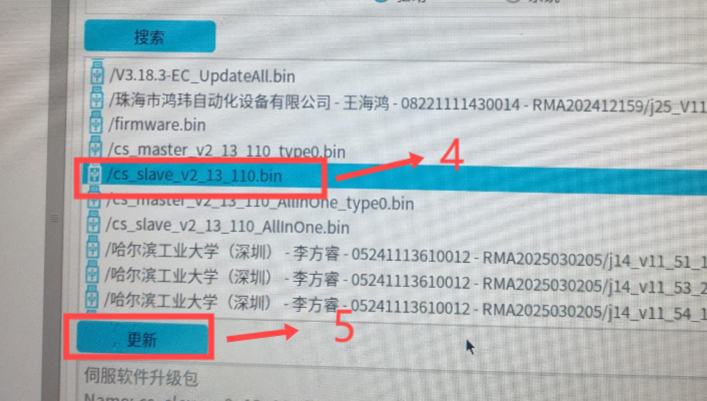
● 选择辅MCU:CS_slave_v2_13_110.bin,并点击“更新”,如下图。
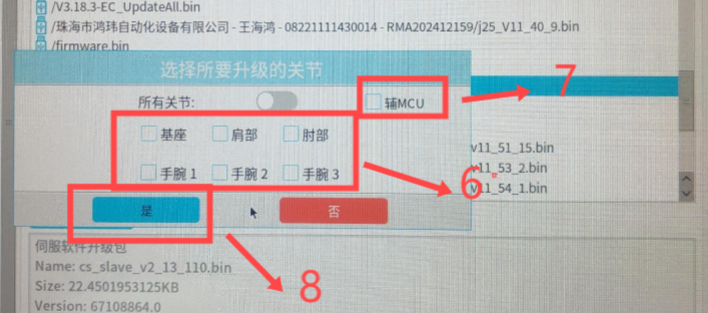
● 点击更新后,会弹出如下的对话框。选择对应”关节”,勾选辅MCU,并点击”是“,等待升级完成即可。(主MCU升级与辅MCU操作方式一致,但不能勾选辅MCU)
● Bin文件链接:
主:http://192.168.21.1:5080/MCU/servo_mcu/cs_servo_bin/cs_servo_20241231131454_v2.13.110/cs_servo_UpData/
辅:http://192.168.21.1:5080/MCU/servo_mcu/cs_slave_bin/cs_slave_20241231131930_v2.13.110/cs_slave_UpData/
5.注意事项
1. 如升级后还出现该问题-返厂更换驱动板
2. 辅MCU升级时,一定要勾选辅MCU


























