
















CS机器人寄存器监控器插件的使用
1. 简介
CS机器人在与外部设备进行通讯时,通常会使用机器人内部的寄存器进行信息交互,机器人自带可查看modbus寄存器,关于布尔寄存器、整数寄存器、浮点数寄存器的查看可安装寄存器监控器插件进行查看,插件文件询问艾利特人员方可获得,存放至U盘内,并插入机器人示教器或控制柜USB接口。
2. 操作流程
按照下方步骤进行安装并检验 寄存器监控器获取:下载中心_机器人技术-艾利特官网
https://www.elibot.com/service/technical?kw=%E5%AF%84%E5%AD%98%E5%99%A8&type1=&type2=&type3=&type4=&type5=&wd=1&tp=1
2.1 插件的安装
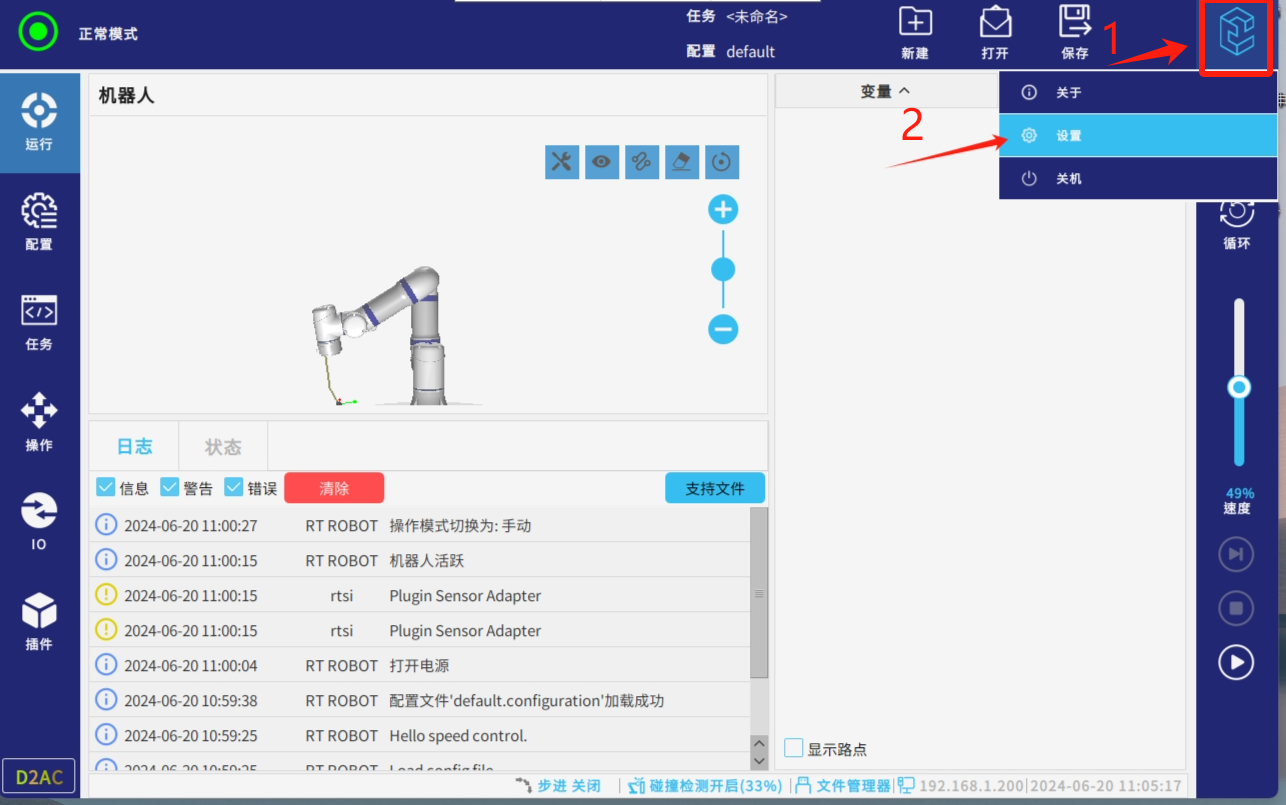
1. 点击右上角的ogo后选择设置;
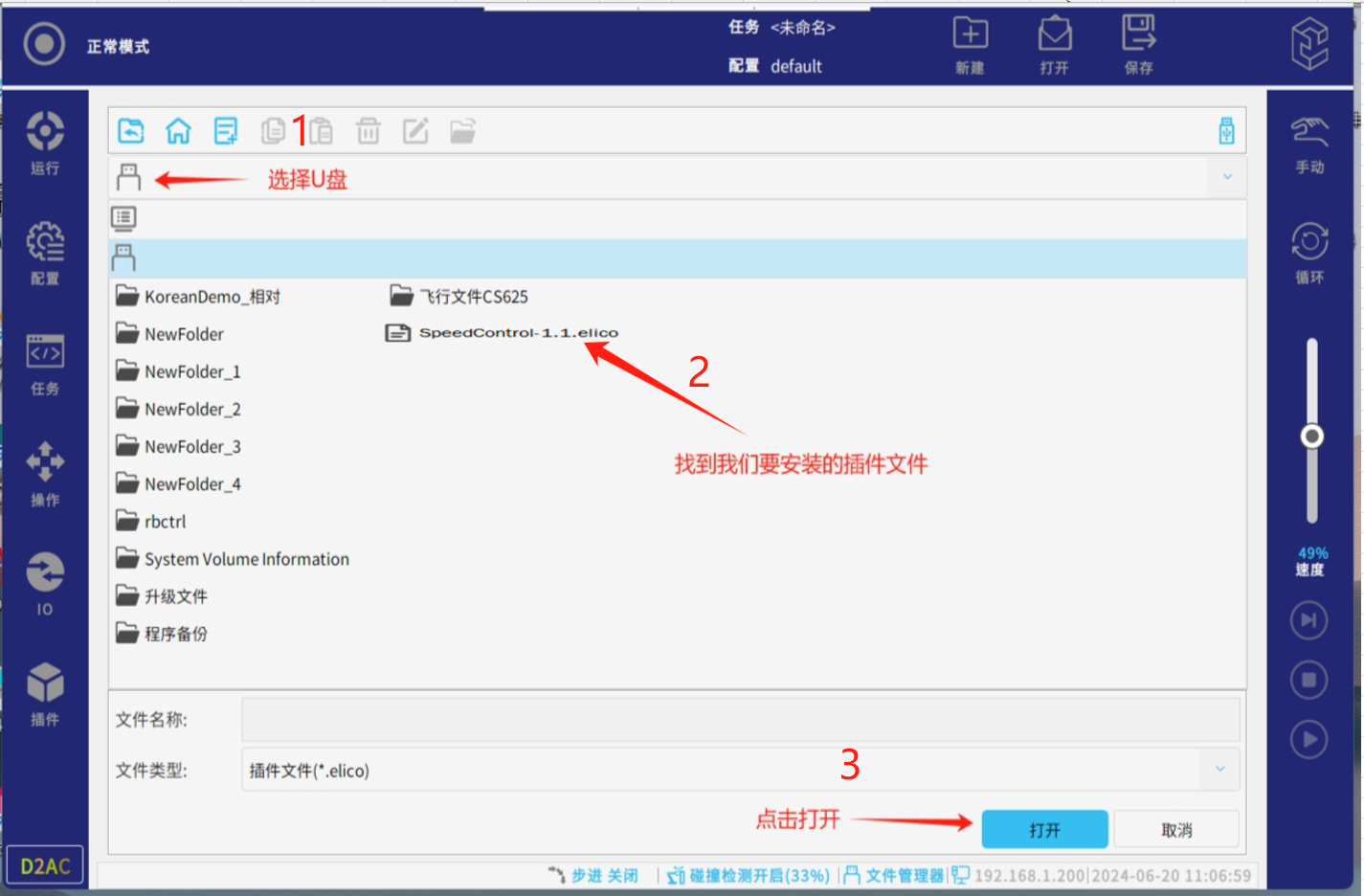
2. 选择U盘后找到存放需要的插件文件后点击打开;
3. 选择重启即可;

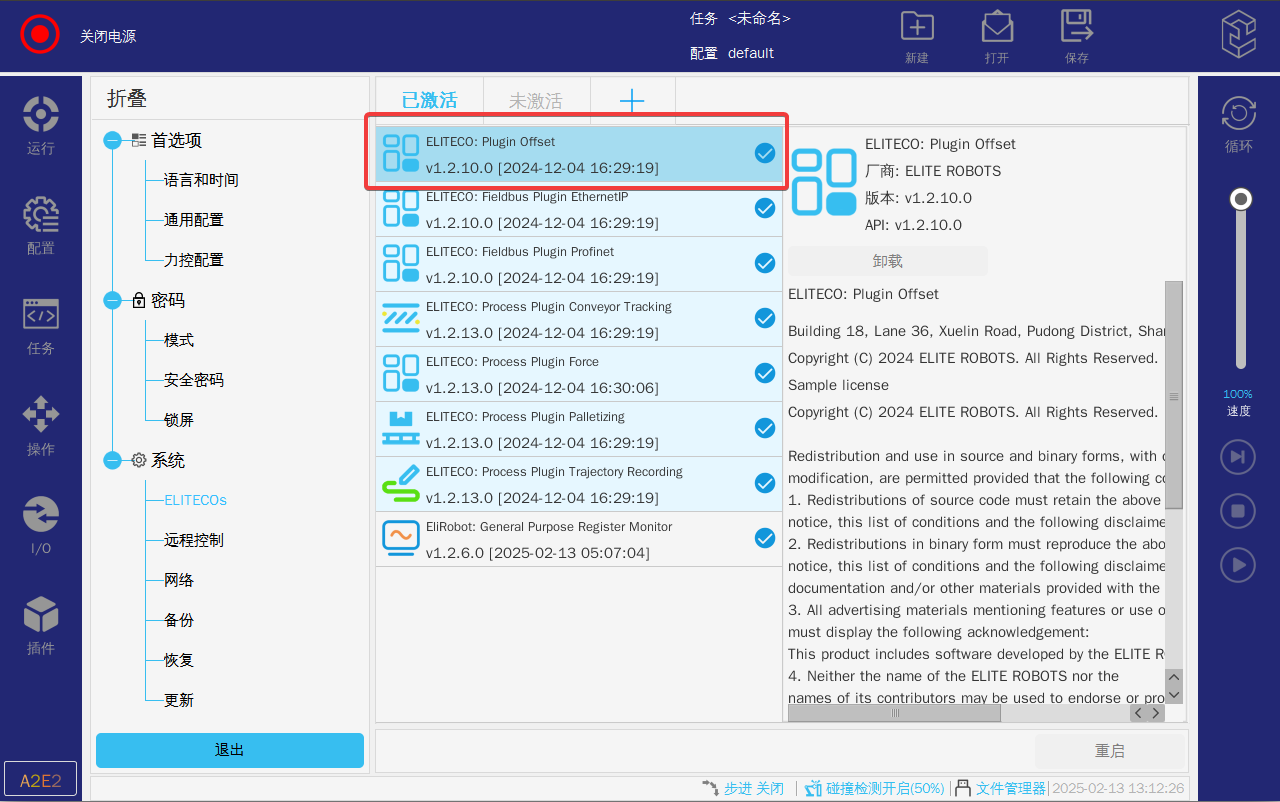
4. 重启后查看下图表示已安转完成;
2.2 插件的使用
2.2.1 寄存器状态查看和强制
1. 点击示教器屏幕左侧底部插件按钮,再点击寄存器监视器进入插件界面;

插件界面分别有布尔寄存器、整数寄存器、浮点寄存器,根据地址查看;
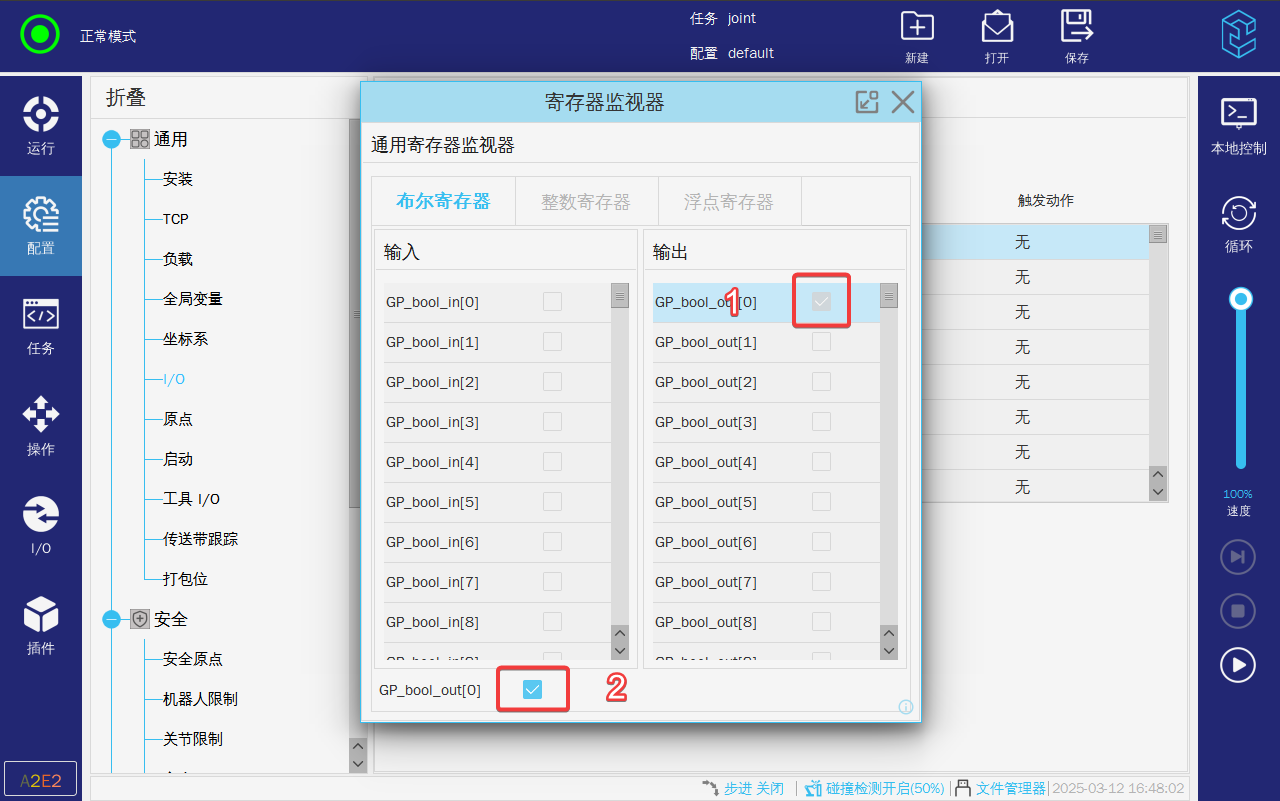
2. 布尔寄存器输入输出数量各128个,保留为总线通讯的输入输出各范围是0-63,保留范围外部RTSI客户端通讯的输入输出范围为64-127,(1)查看状态,(2)输出强制为True;
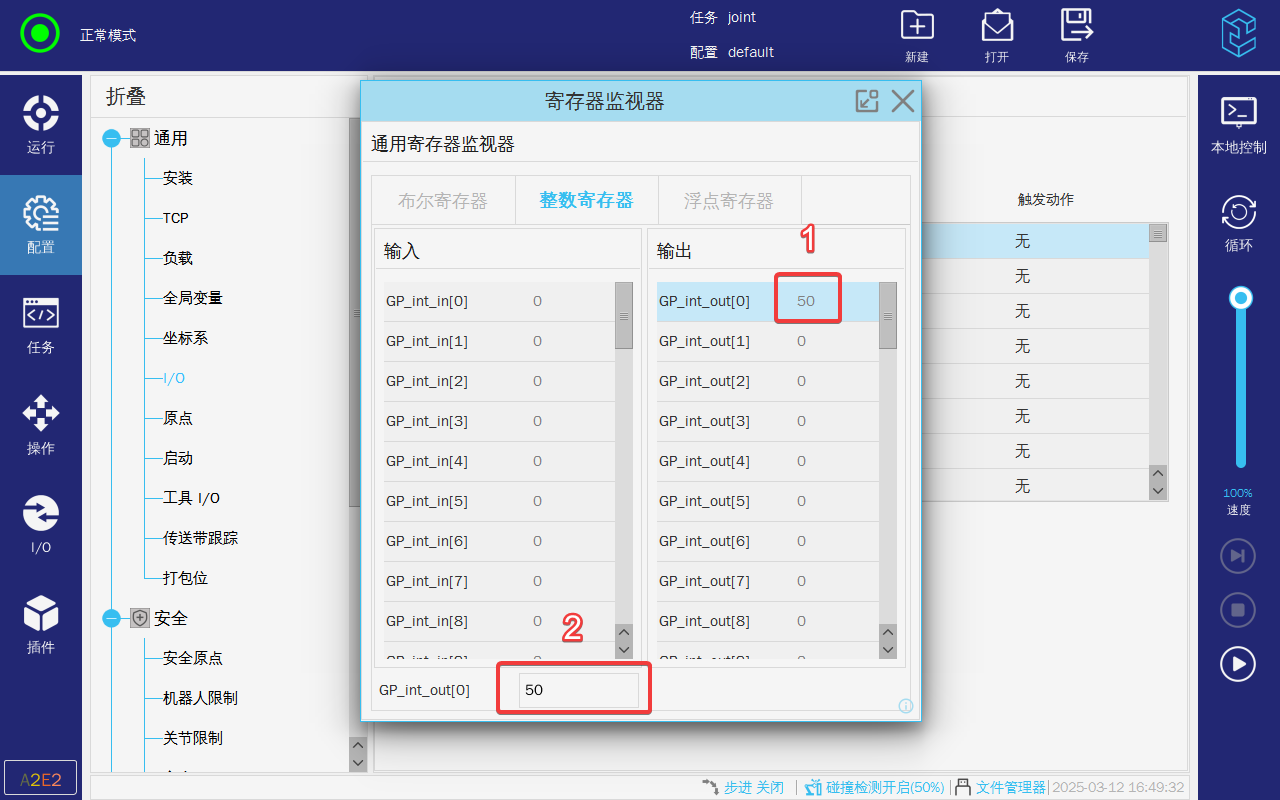
3. 整数寄存器输入输出数量各47个,保留为总线通讯的输入输出各范围是0-23,保留范围外部RTSI客户端通讯的输入输出范围为23-47,,(1)查看状态,(2)输出整数;
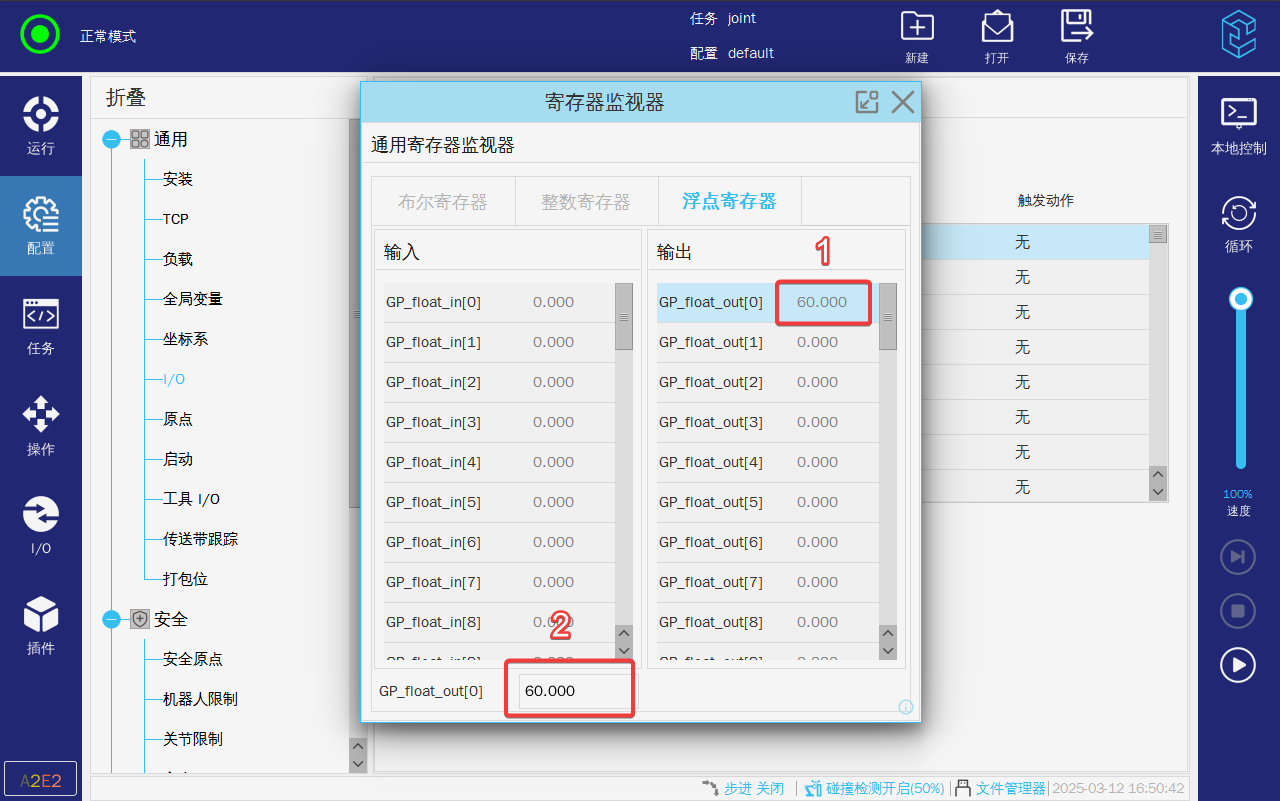
4. 浮点寄存器输入输出数量各47个,保留为总线通讯的输入输出各范围是0-23,保留范围外部RTSI客户端通讯的输入输出范围为23-47,(1)查看状态,(2)输出浮点数;
2.2.2 寄存器名称更改
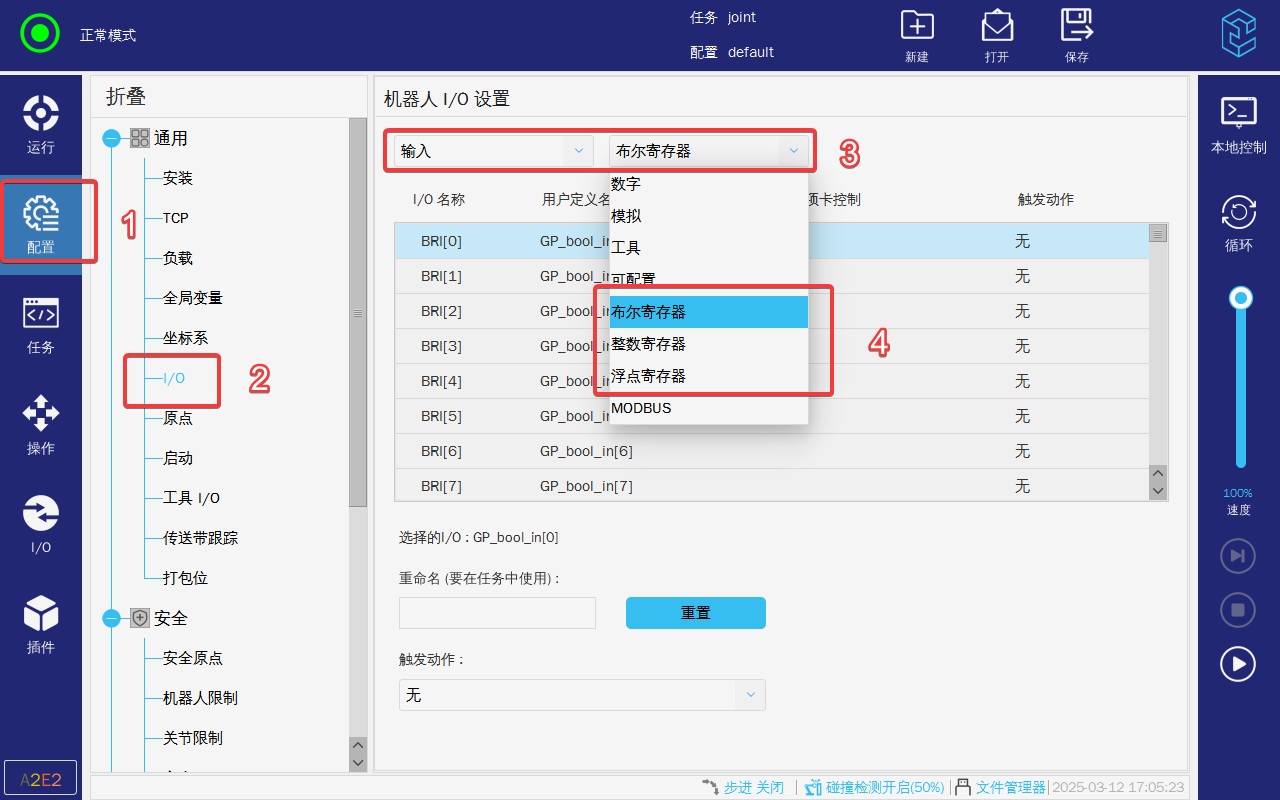
1. 点击配置-通用-IO,选择需要更改的输入输出寄存器,选择后进行重命名;
2.3 通讯使用范围说明
1. 输入布尔寄存器(0-63),输出布尔寄存器(0-63);输入整数寄存器(0-23),输出整数寄存器(0-23);输入浮点寄存器(0-23),输出浮点寄存器(0-23),保留为总线通讯扩展使用,例如EthernetIP,profinet通讯等;
2. 输入布尔寄存器(64-127),输出布尔寄存器(64-127);输入整数寄存器(24-47),输出整数寄存器(24-47);输入浮点寄存器(24-47),输出浮点寄存器(24-47),保留为外部RTSI客户端使用;
3. 常见问题解答
1. 机器人系统版本需在2.9.0及以上;
2. 插件安装需要重启后使用;
3. 插件版本的更新询问艾利特人员获悉。


























