
















CS机器人与第3方力传感器适配
简介:
CS机械臂除F系列标配力控传感器外,也可以通过第3方力控传感器来实现,比如:鑫精诚,蓝点,坤维,宇立(走末端RS485通讯)。以下文章讲解如何使用外部传感器,快速适配各种参数,以及解决各种经常遇到的问题。
1. 操作步骤
1.1 安装力控传感器
1. 将第三方力控传感器安装在我们的机械臂末端法兰上面,连接末端航插。
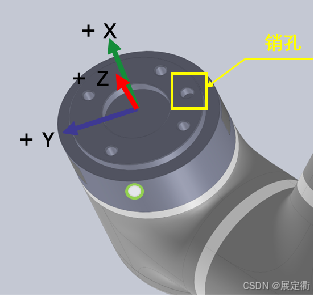
2. 注意安装方向,力控传感器的X,Y,Z方向要与机械臂的工具坐标系方向一致,可以参考下图确认安装方向
3. 安装好后设置工具IO的参数,工具输出电压,波特率,奇偶校验,以及使用模式,不同品牌的力控传感器参数设置不同,这个需要注意。如下图:


1.2 安装插件
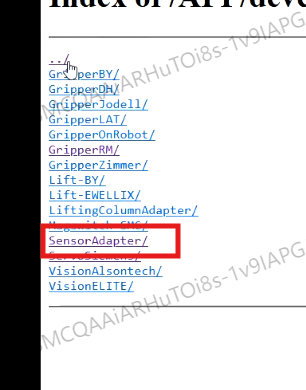
再安装力传感器监视插件SensorAdapter(插件文件可向艾利特工程师索取),如下图:
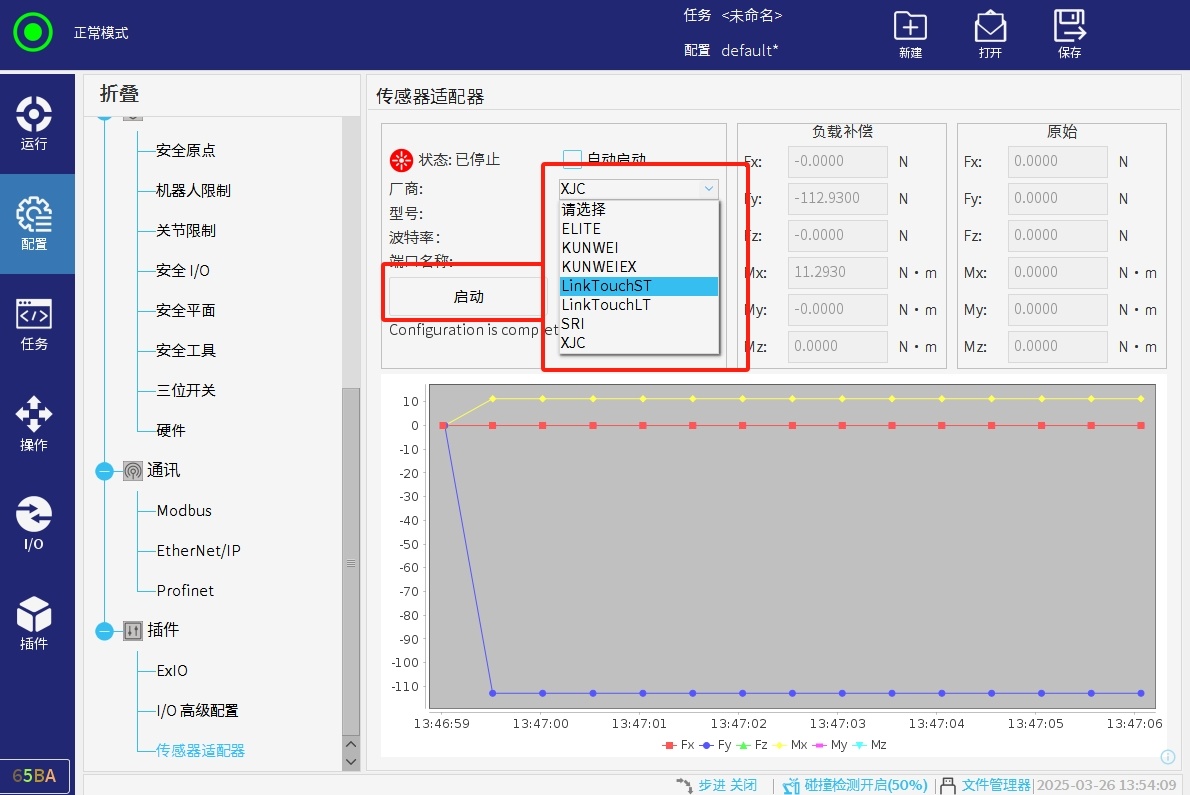
安装好插件后,打开插件,选择对应传感器的名称 ,点击启动
1.3 打开插件,检查力控数据
打开力控插件后,需检查一下负载补偿与原始数据,是否正常,如果不正常,需要做力传感器标定。也可以稍微给力传感器外部施加力,检查负载补偿是否有数据,如果没有数据,也是说明不正常。

1.4 力传感器空载标定
1. 检查负载设置是否为0,将负载设置为0后,末端工装夹具也要拆下来,只带力控传感器。
2. 关闭锁轴拖动功能。
3. 检查机械臂周围是否有干扰物品,防止之后空载标定的时候出现碰撞。
4. 建议速度不要设置太快,推荐30%。
5. 进入开发者模式,点击力传感器空载标定,机械臂标定的时候会以固定轨迹运行,等运行结束,会提示标定结束。

6. 标定结束后再次检查负载补偿与原始参数。如果都趋近于0,说明标定成功。
1.5 打开拖动界面,选择模式
打开拖动界面,选择拖动限制,仅平面,仅旋转,无约束。

2. 锁轴拖动阻尼设置
2.1 平动阻尼
平动阻尼就是机械臂在力控模式下,朝X,Y,Z方向水平拖动时候的阻力,参数越大,拖动起来越费力。
多用在力控传感器的末端的工装接触到桌面会回弹的现象。将平动阻尼调大,就不会回弹了。
2.2 旋转阻尼
旋转阻尼就是机械臂在力控模式下拖动,手腕关节朝RX,RY,RZ方向旋转的阻力,参数越大,力控拖动越费力。

3. 力传感器碰撞检测
该功能需要打开力控插件,才能设置该参数,用户可以自定义碰撞力阈值,当力传感器末端如果感受到相应反方向的阈值的力,机械臂就会停止。
需要注意的是,如果在打开锁轴拖动功能的前提下进行传感器空载标定的时候,需要把这个功能关闭,不然无法标定。

4. 负载辨识
4.1 操作步骤
1. 打开力控传感器适配器

2. 选择负载---负载辨识

3. 按照下图中所示机械臂位姿,设置4个不同的点位,设置好后点击完成即可。



























