
















CS机器人通过codesys与两台CS机器人进行EIP通讯
1. 简介
EtherNet/IP 是一种基于以太网技术的工业自动化网络协议,是以太网技术
在工业领域的应用。它是由罗克韦尔自动化公司(Rockwell Automation)开发
的,是一种开放的网络标准,可以用于连接各种各样的设备,如 PLC、传感器、
执行器、HMI 等。
EtherNet/IP 协议基于 TCP/IP 协议栈,采用了面向连接和面向无连接的通
信方式,可以实现高速的数据传输和实时的控制。它可以支持 10Mbps、100Mbps
和 1000Mbps 三种传输速率,距离可以达到 100 米或更远。同时,EtherNet/IP
还具有很强的灵活性和可扩展性,可以支持多种拓扑结构和协议适配器。
EtherNet/IP 协议的主要特点包括:
高速传输:EtherNet/IP 可以支持多种传输速率,可以满足不同应用场景的
需求。
实时性强:EtherNet/IP 可以实现高速数据传输和实时控制。
灵活性强:EtherNet/IP 可以支持多种拓扑结构和协议适配器。
易于集成:EtherNet/IP 是一种开放的网络标准,可以与各种各样的设备集
成使用。
可扩展性强:EtherNet/IP 可以通过加入新的协议适配器和功能模块来扩展
网络功能。
安全性好:EtherNet/IP 支持多种安全机制,如 VLAN、VPN、IPsec 等,可以
保证网络安全。
CS 系列产品支持EtherNet/IP 从站应用。 如果机器人作为从设备运行,只需
设置好 IP 地址及开启 Ethernet/IP 功能即可,无需进行其他设置
2. 操作指导
2.1.机器人端配置
2.1.1 设置 IP 地址
PC 连接使用 FB1 网络,Codesys 使用 PC 端,IP 地址设置 FB1 网络。
第一台机器人地址为 172.16.201.101

第二台机器人地址为 172.16.201.102

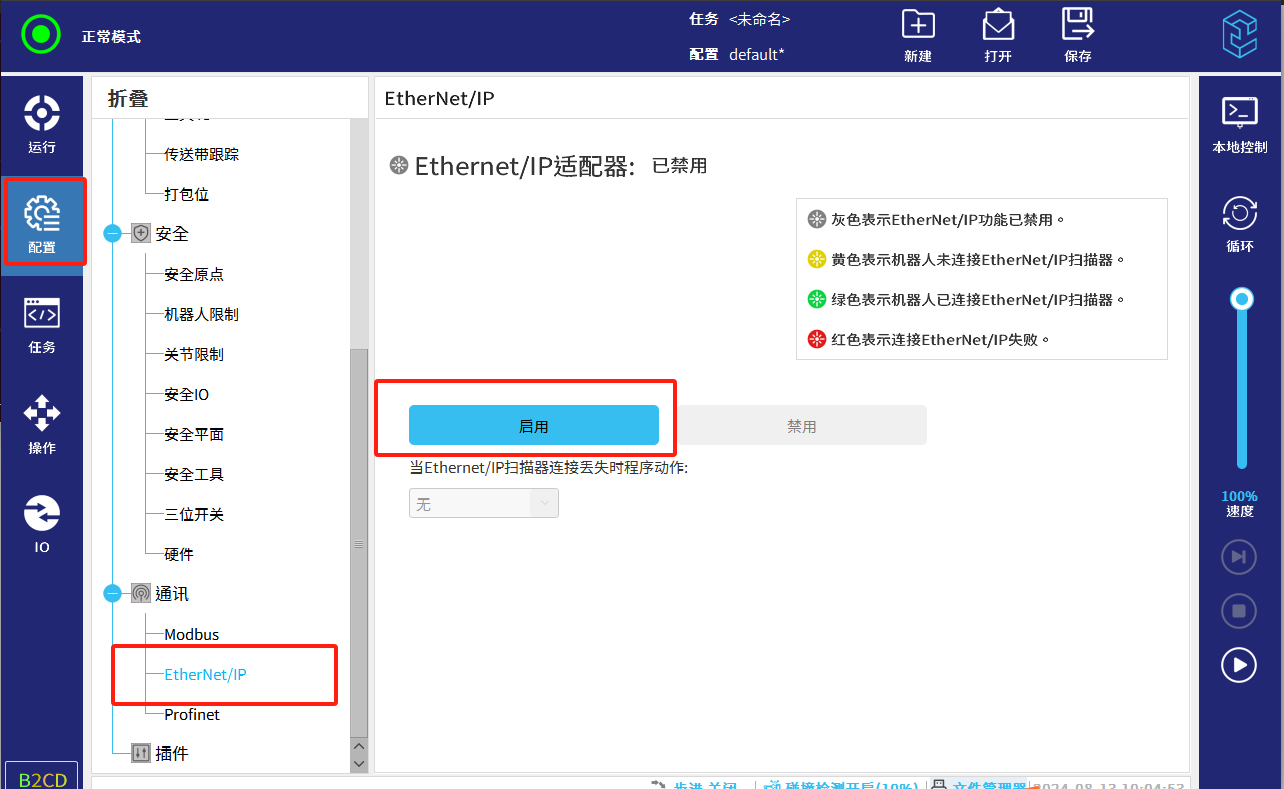
2.1.2 激活EtherNet/IP
点击配置---EthereNet/IP---启用
2.2 codesys配置
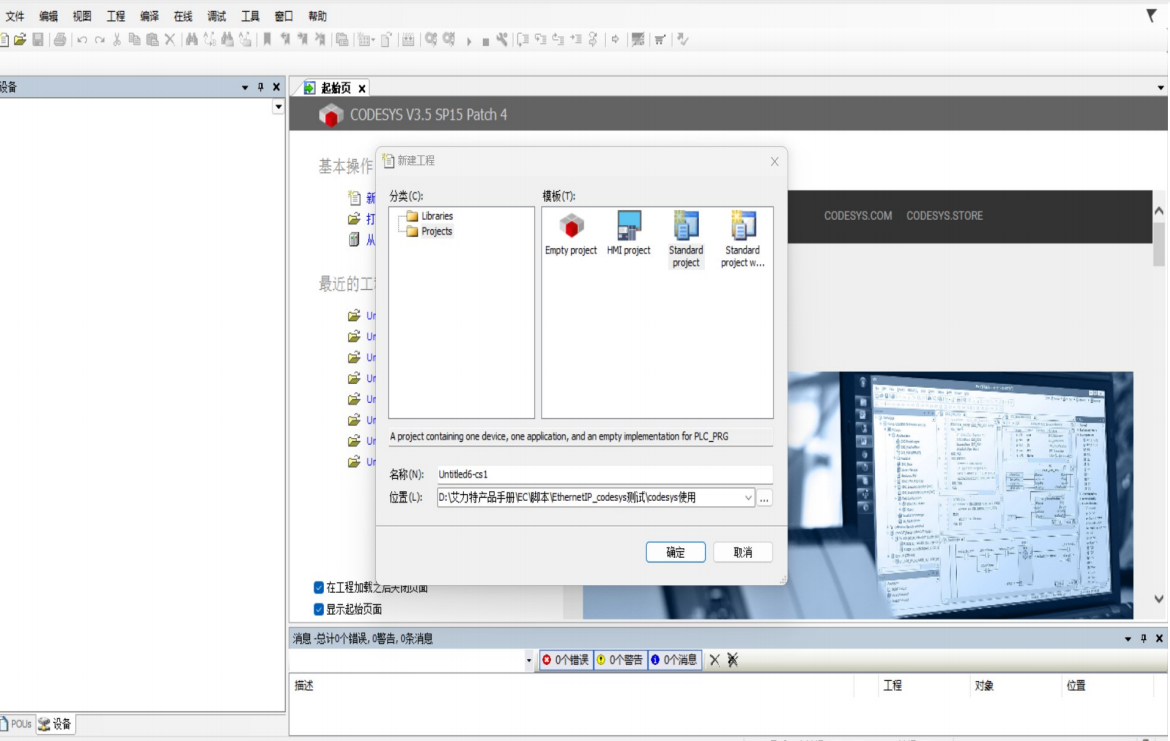
2.2.1 新建程序
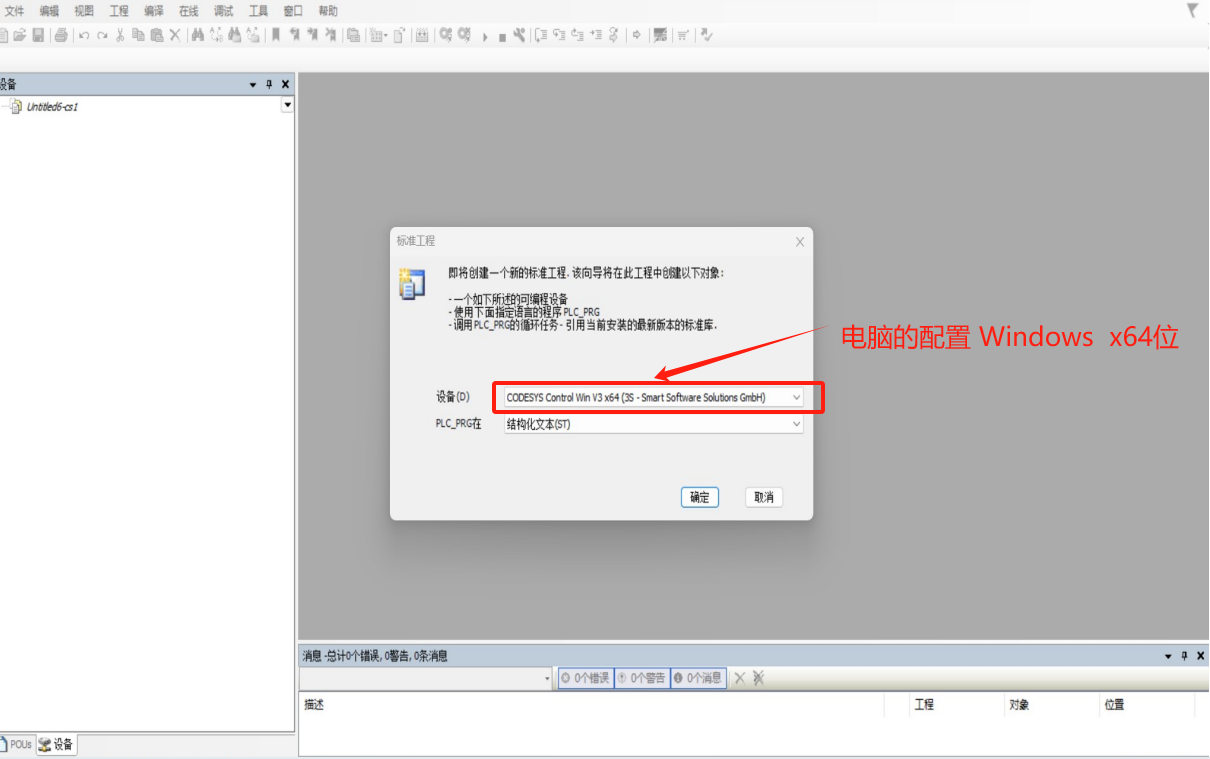
2.2.2 选择对应设置型号
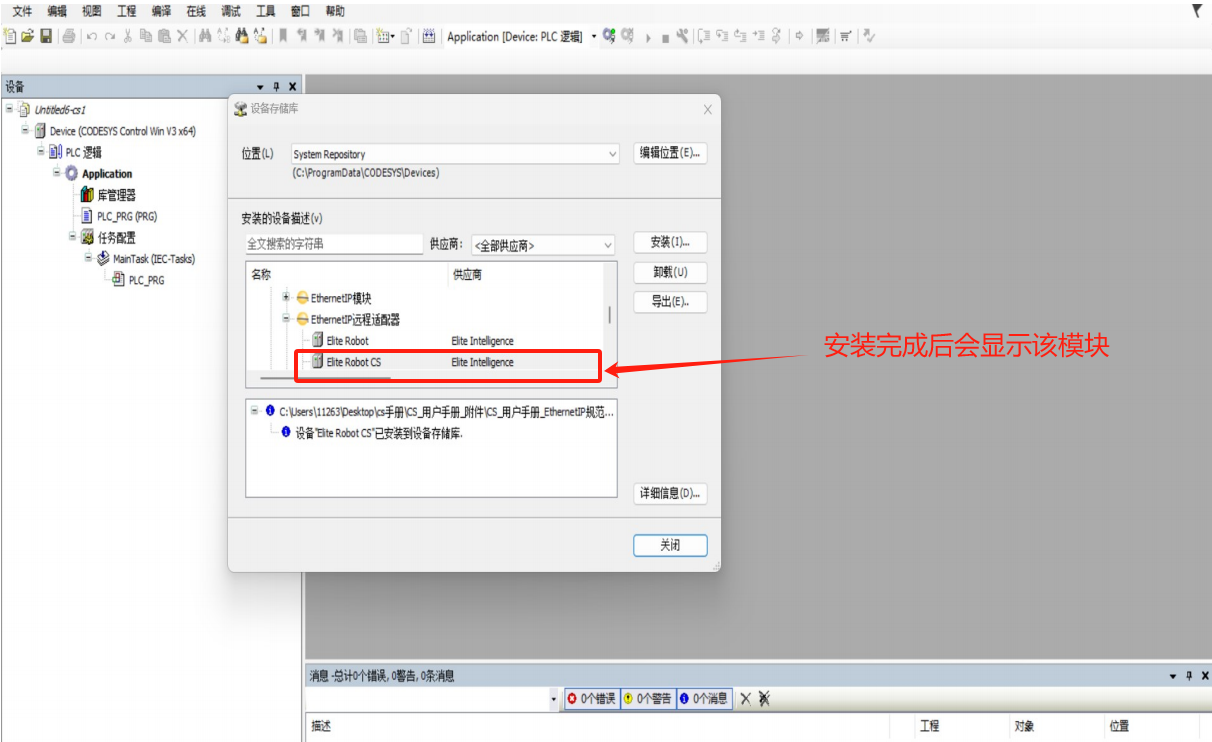
2.2.3 配置对应的 eds 文件(2.12版本之前无分类卡槽,2.12版本之后卡槽可分类,可根据对应版本安装对应的eds文件)
选择工具-设备存储库-安装
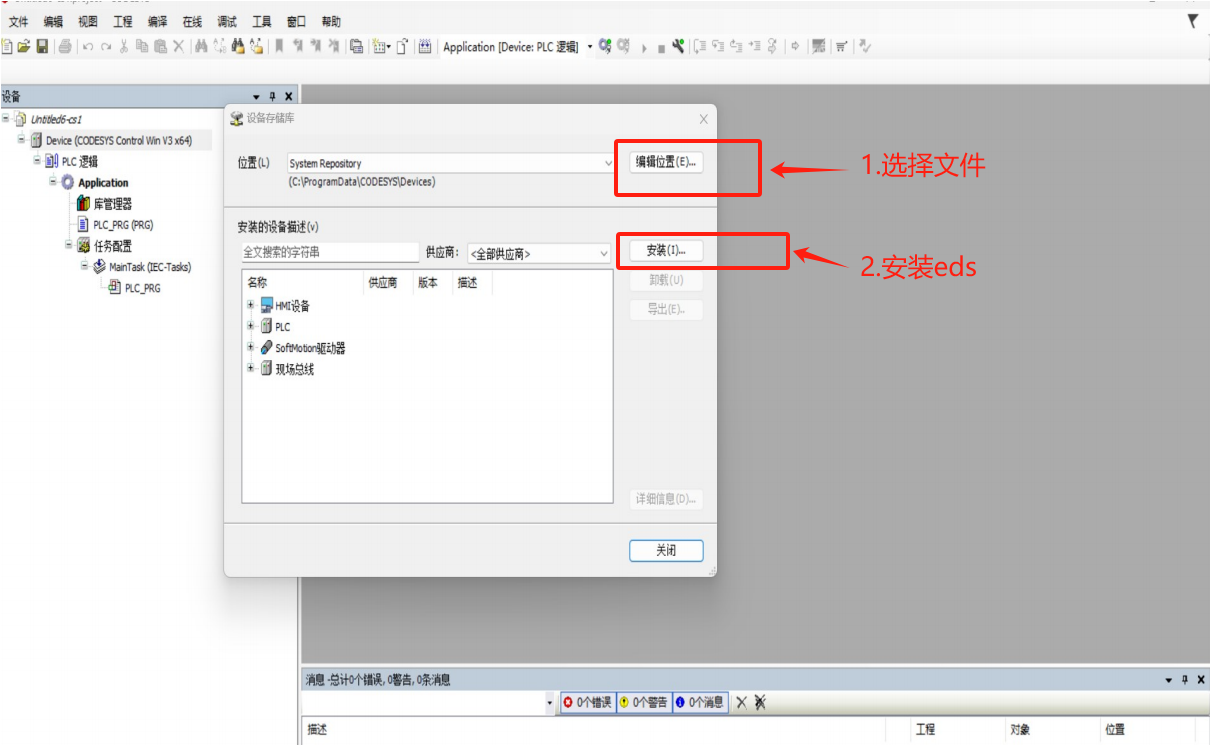
安装完成
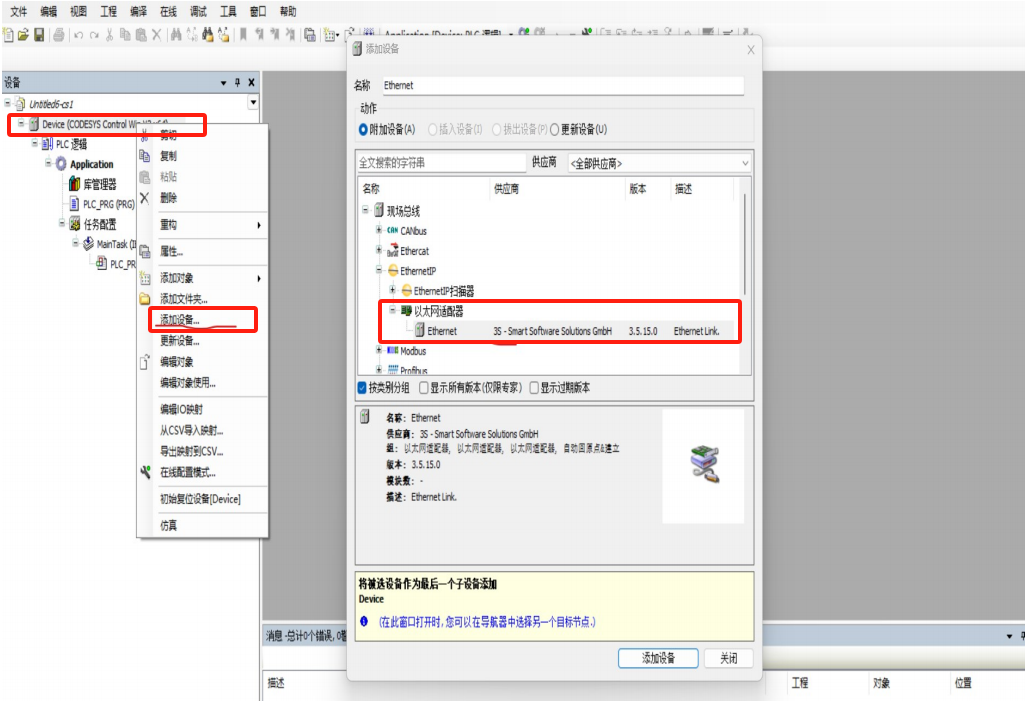
2.2.4 添加EtherNet/IP设备
选择 Device-添加设备-EthernetIP-以太网适配器-Ethernet
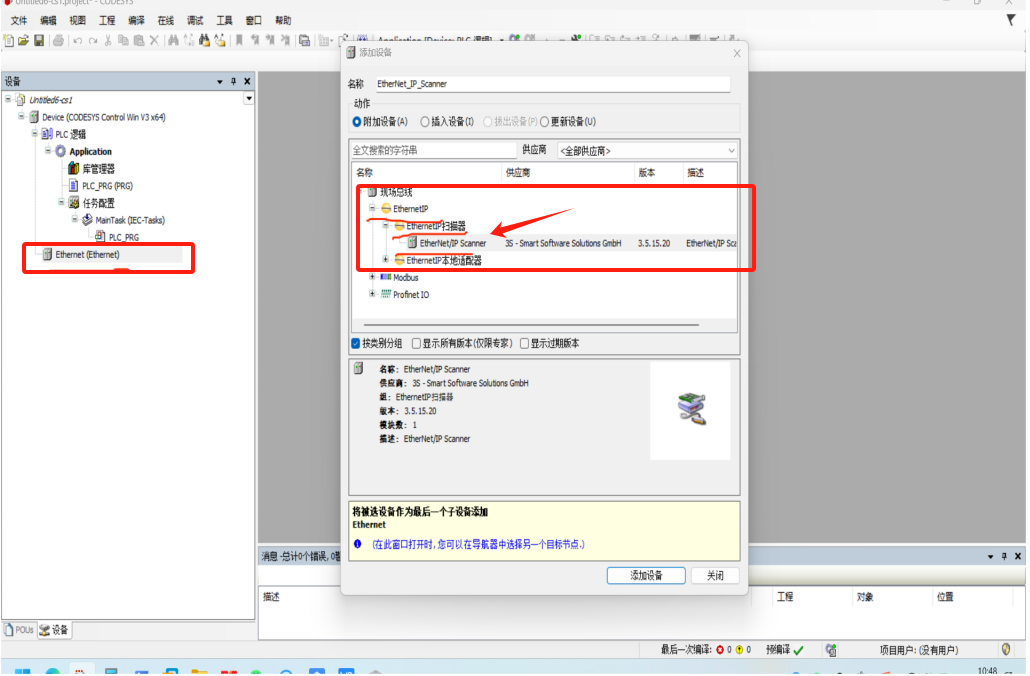
选择 Ethernet-添加设备-EthernetIP-EthernetIP 扫描器-Ethernet/IP Scanner(同样的操作,添加两个Ethernet/IP Scanner)
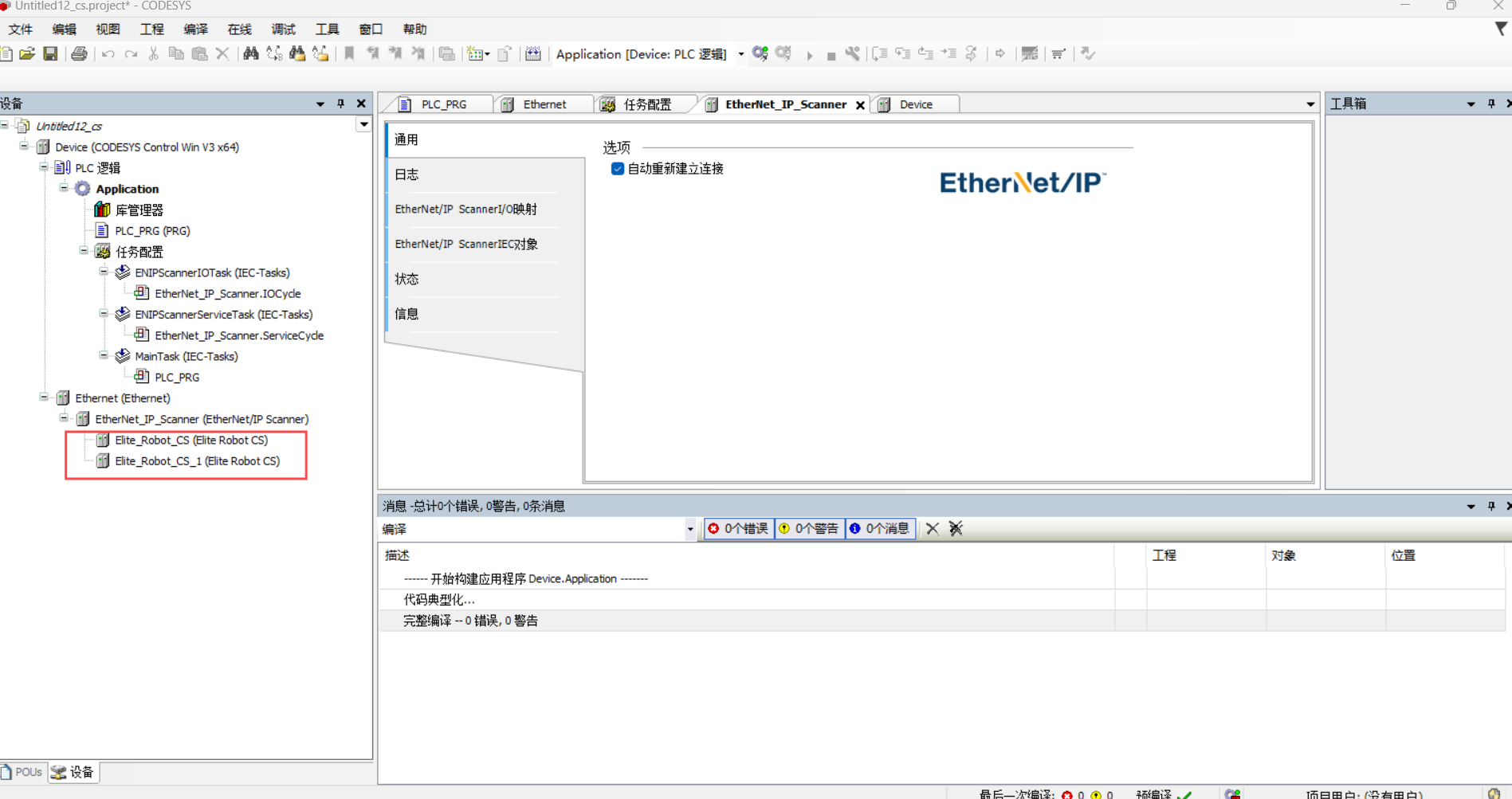
选择 Ethernet/IP Scanner-添加设备-EthernetIP-EthernetIP 远程适配器-Elite Robot CS
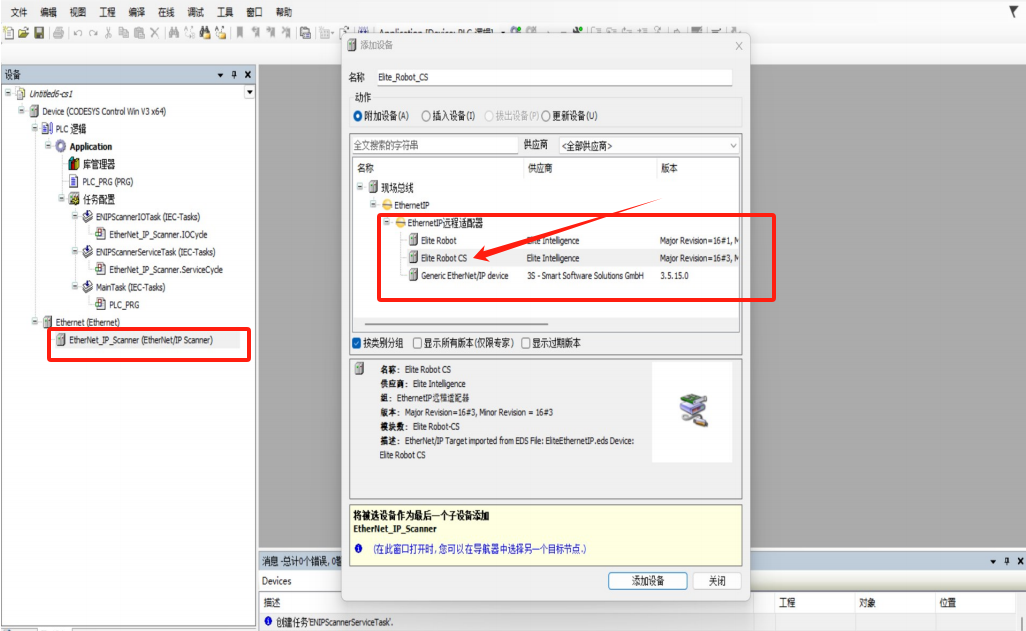
同上操作添加两台Elite Robot CS,如下图
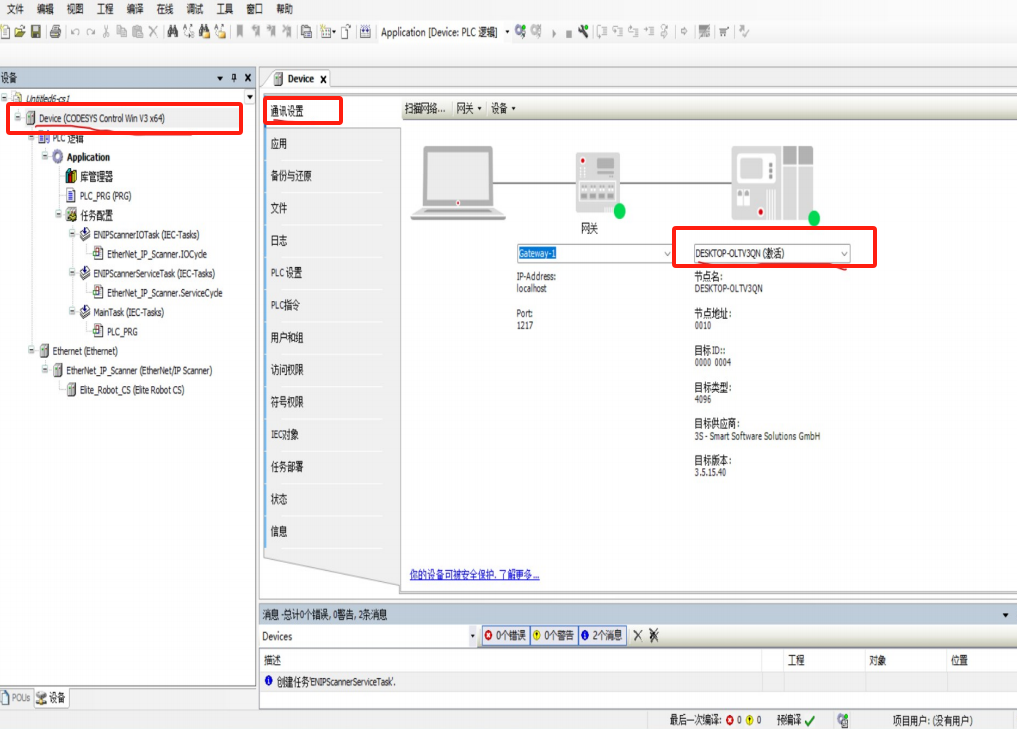
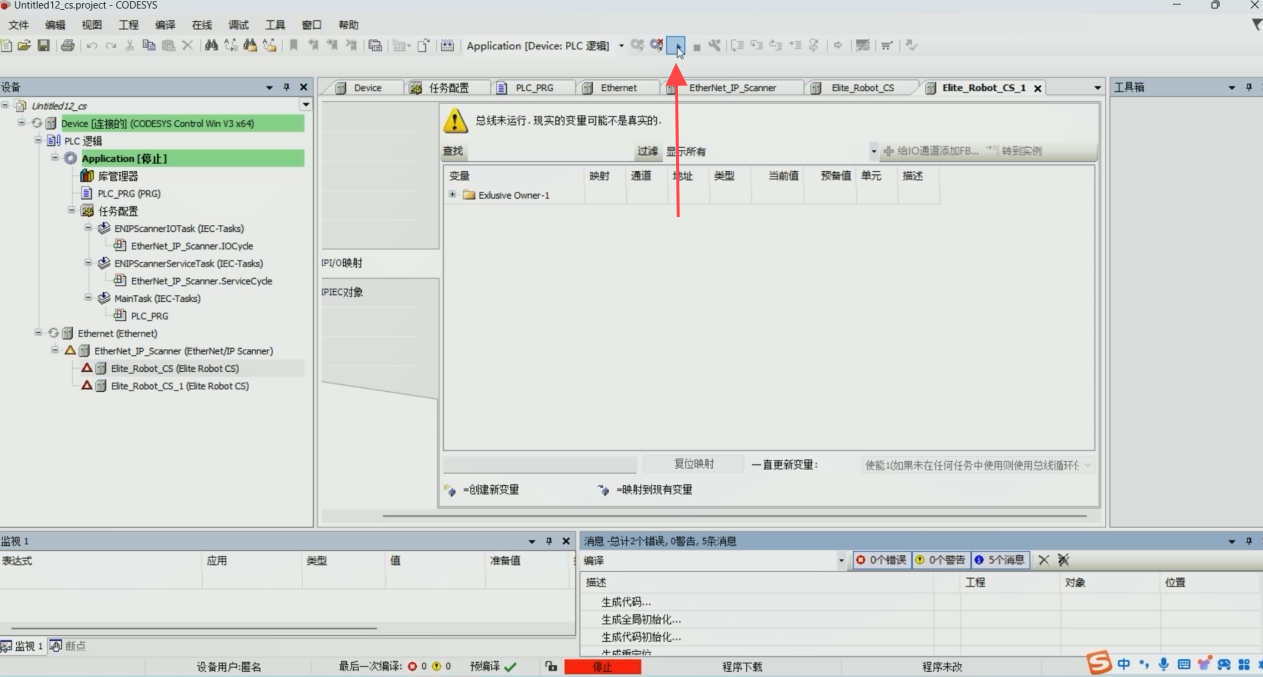
在电脑状态栏中,将 PLC 和 Gateway
和 Gateway![]() 开启,当图标颜色变成红色后为开启。
开启,当图标颜色变成红色后为开启。
选择Device-通讯设置-选择对应电脑型号,扫描成功后,会保持激活状态
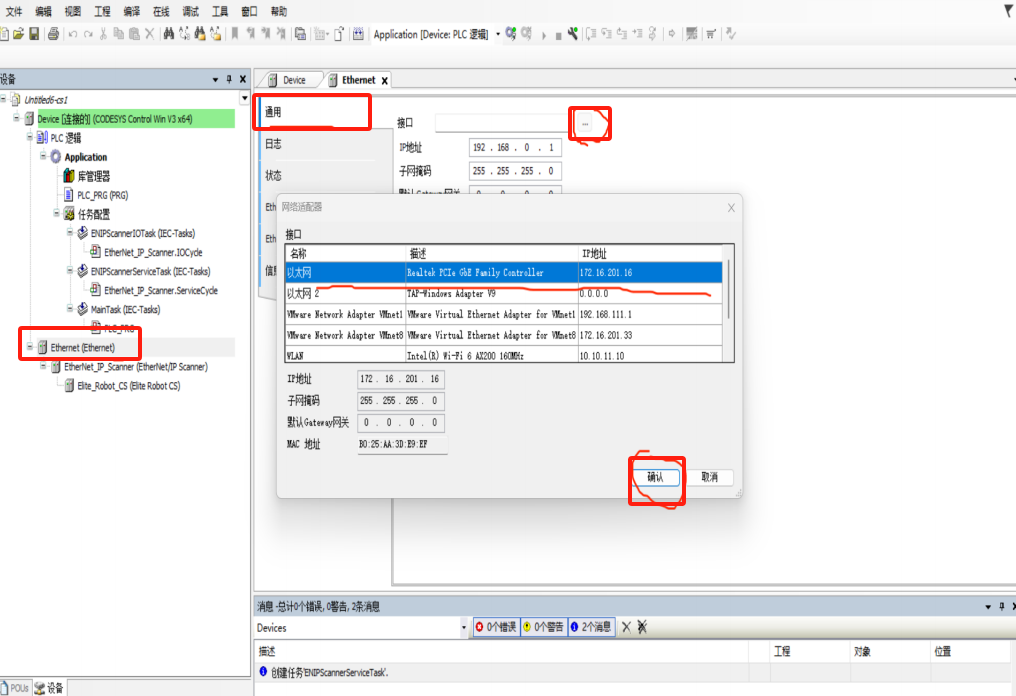
选择Ethernet-通用-接口-选择当前对应的以太网(当前电脑端口)
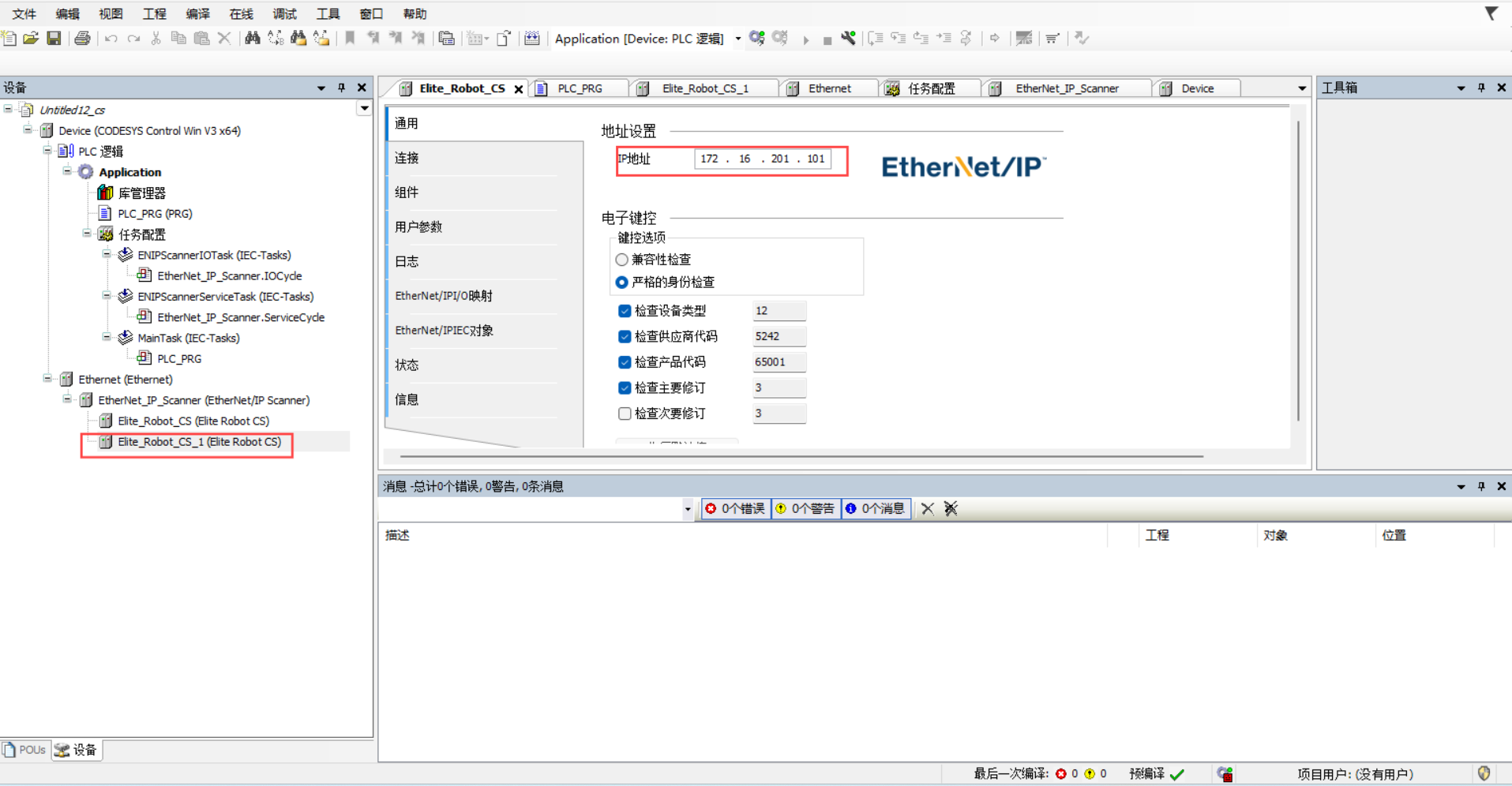
选择EliteRobotCS-通用-IP地址-将机器人IP地址写入进去(172.16.201.101)
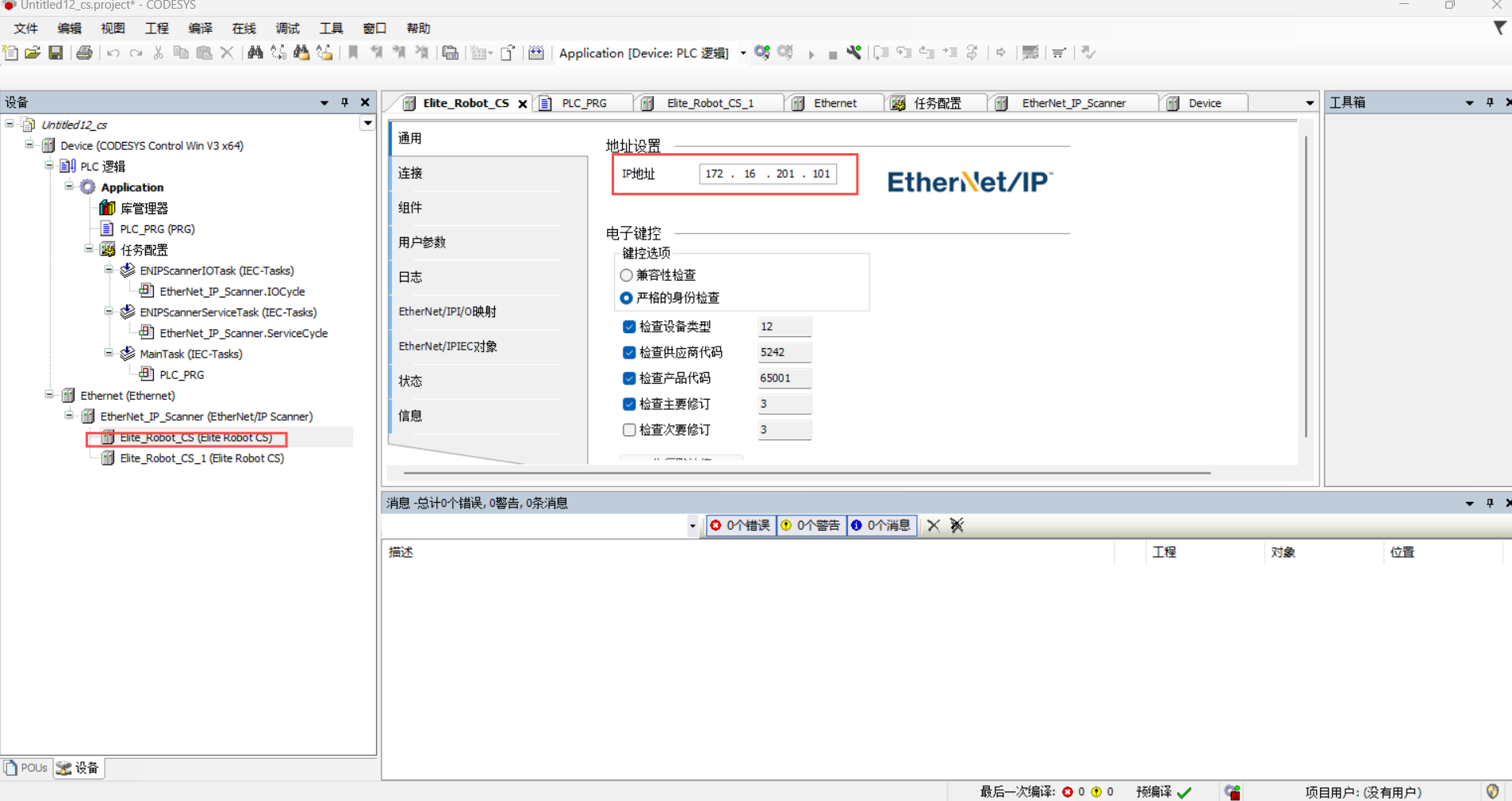
选择EliteRobotCS_1-通用-IP地址-将机器人IP地址写入进去(172.16.201.102)
连接对应卡槽
2.12版本之前只能使用整体1个卡槽,所有的数据都在卡槽内,占用硬件内存较多
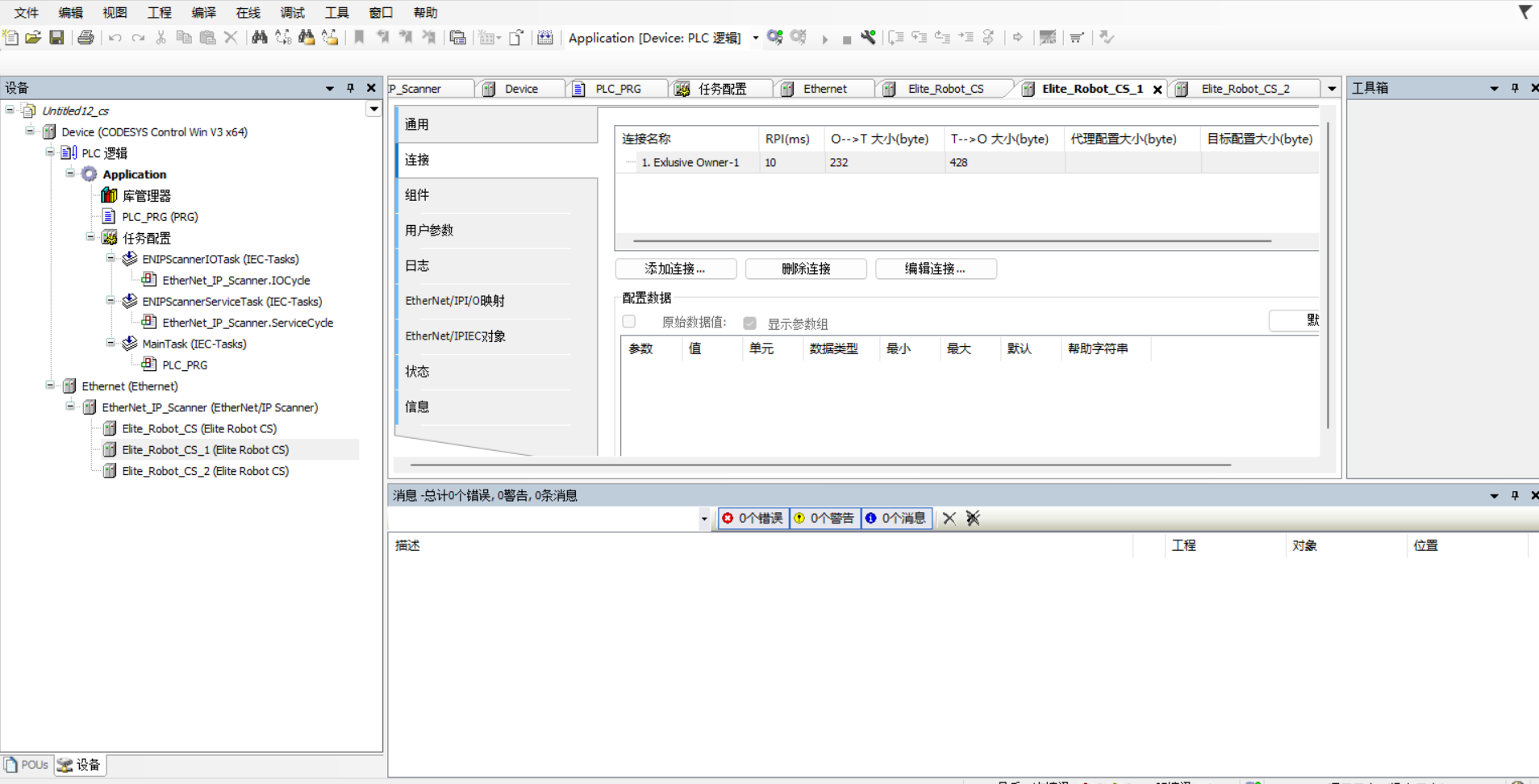
2.12版本之后,卡槽进行了分类,可以选择整体卡槽,也可以单独选择想用的功能卡槽,可减少硬件内存使用。
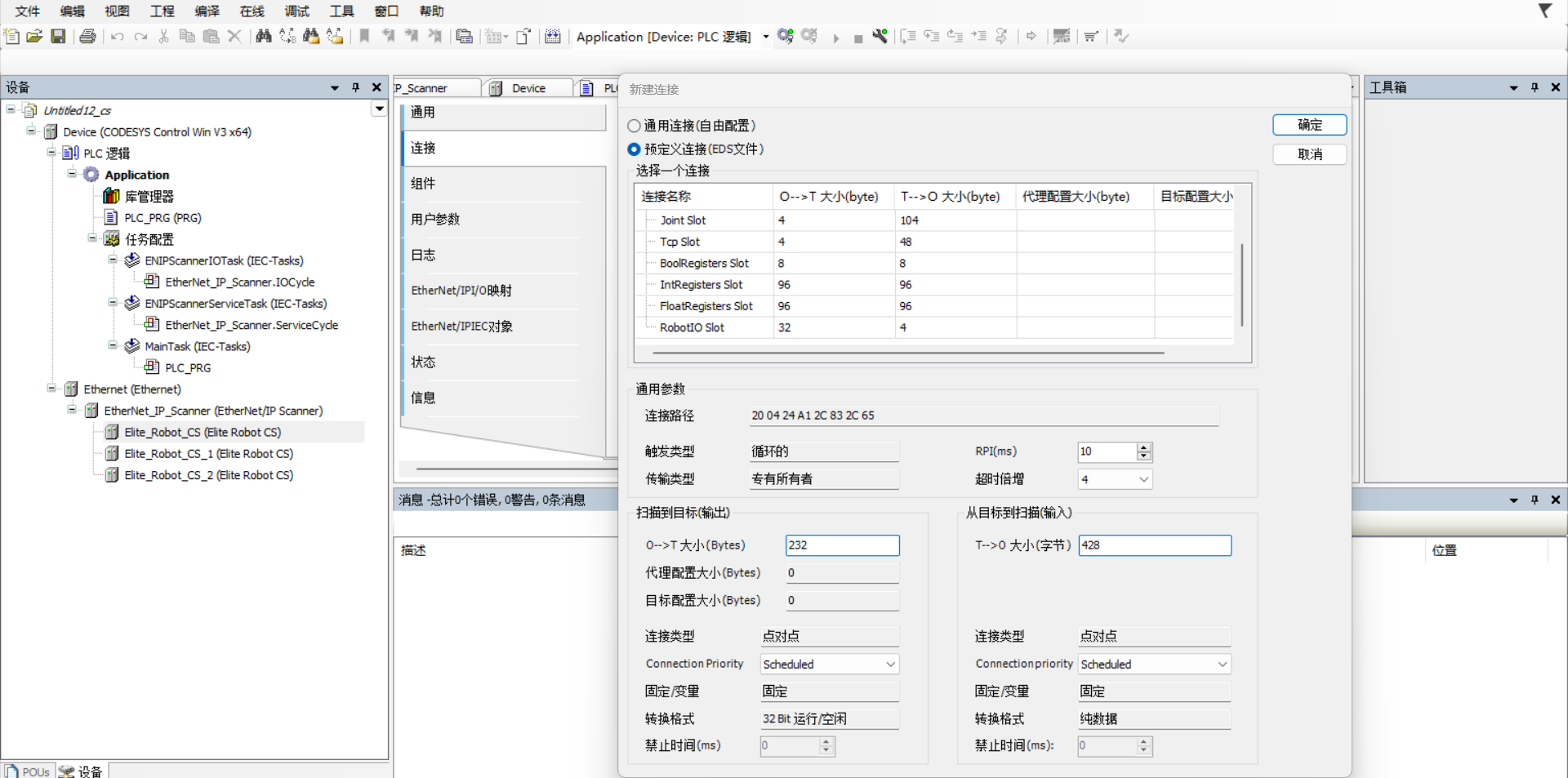
可根据不同版本选择对应的eds文件
编译程序并下载,启动程序并运行
2.2.5 机器人与codesys数据通讯
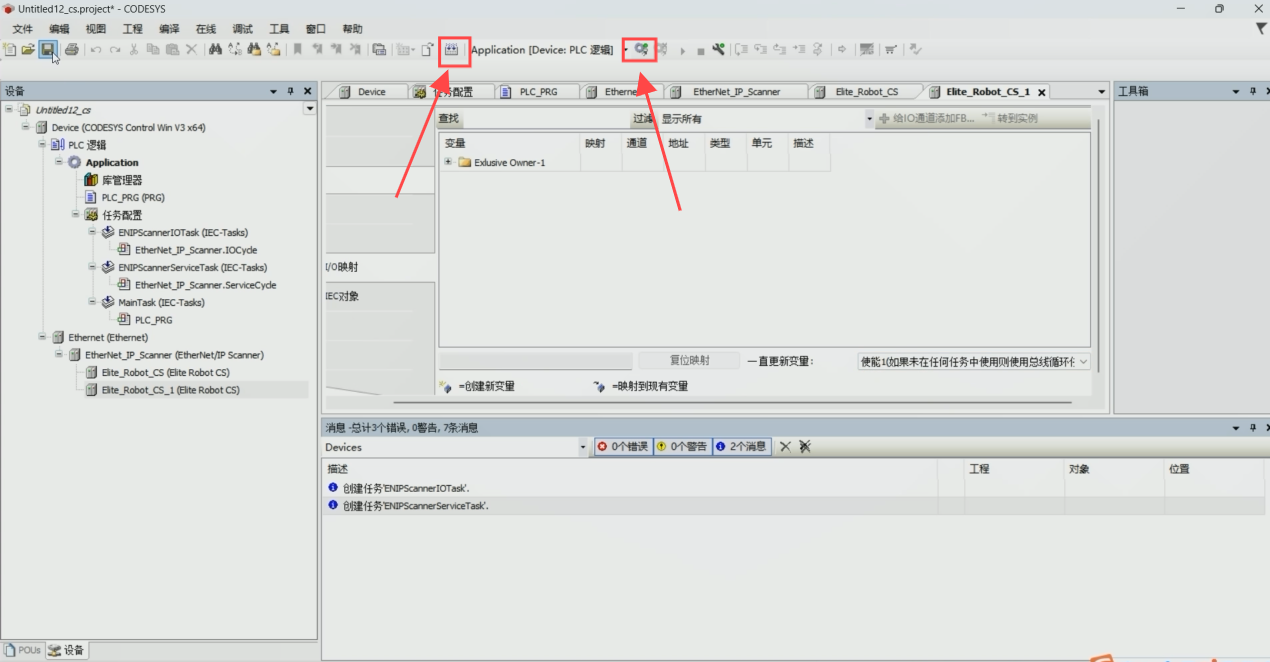
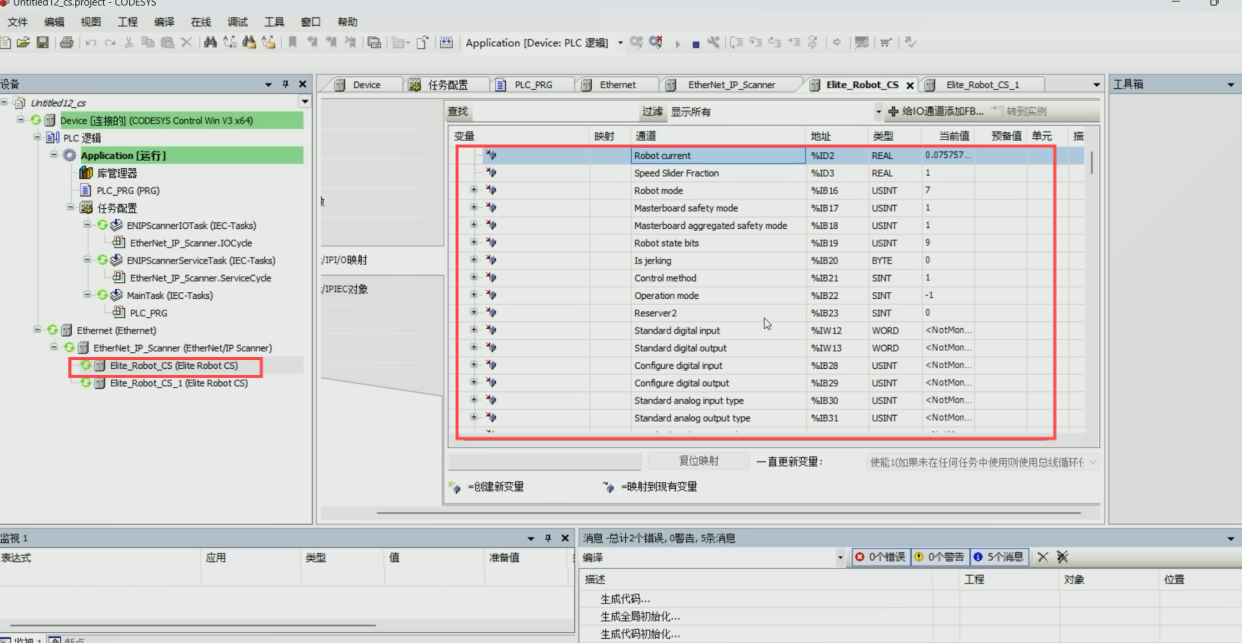
选择Elite_Robot_ CS---Ethernet/IPI/O映射,将ExlusiveOwner-1展开,可看到机器人当前的一些具体信息 (具体报文数据查看附录中的《CS_用户手册_EthernetIP数据格式》文档)
查看codesys输入布尔量数据
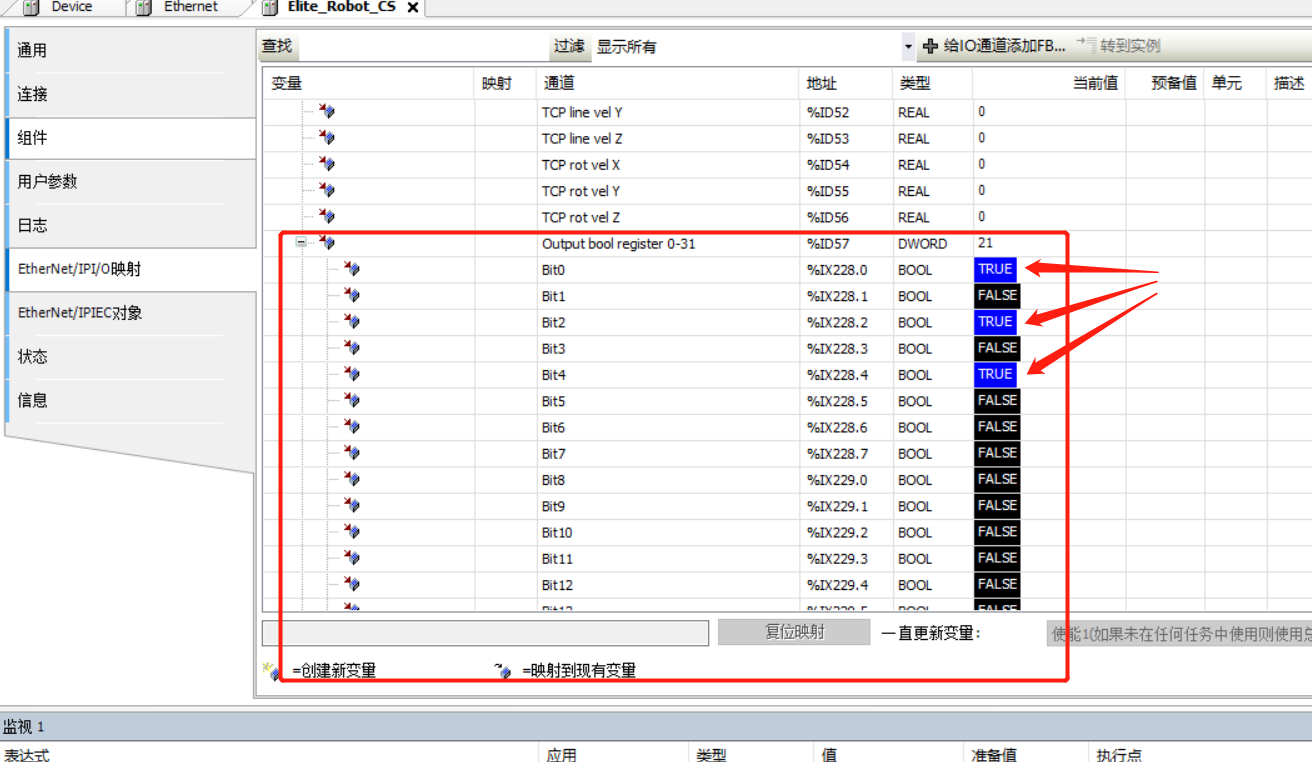
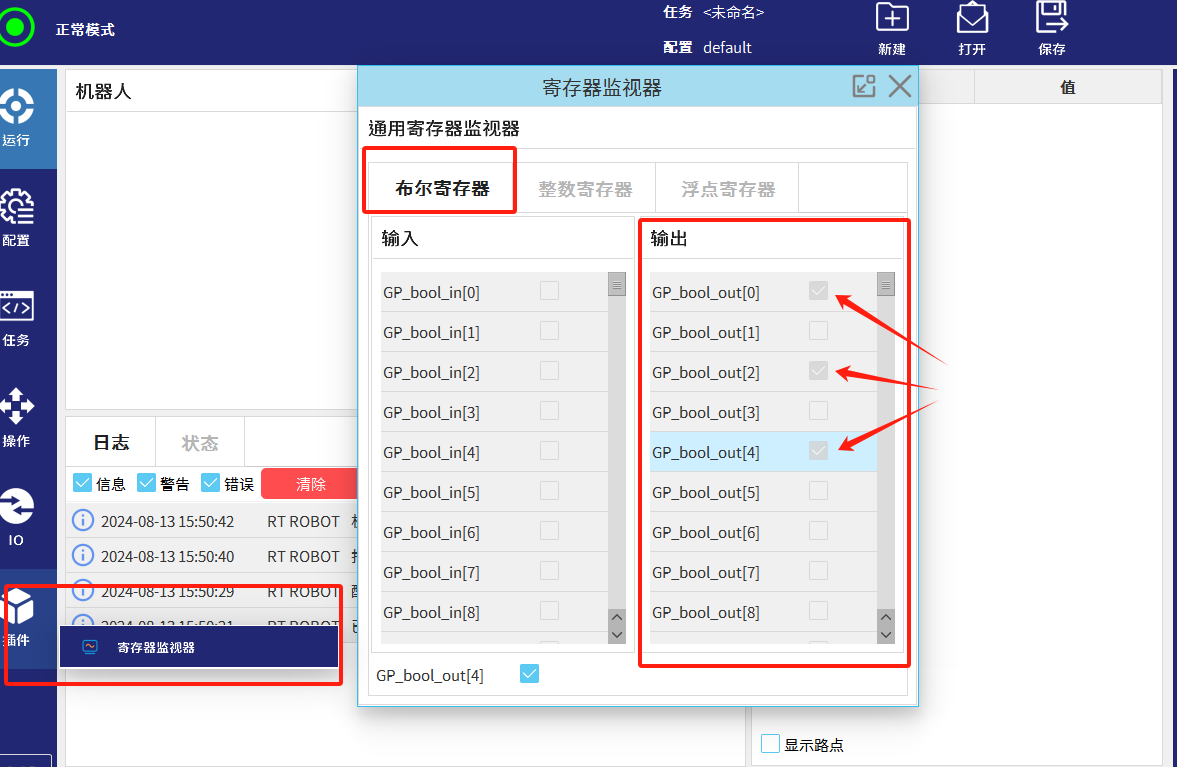
机器人布尔量置位
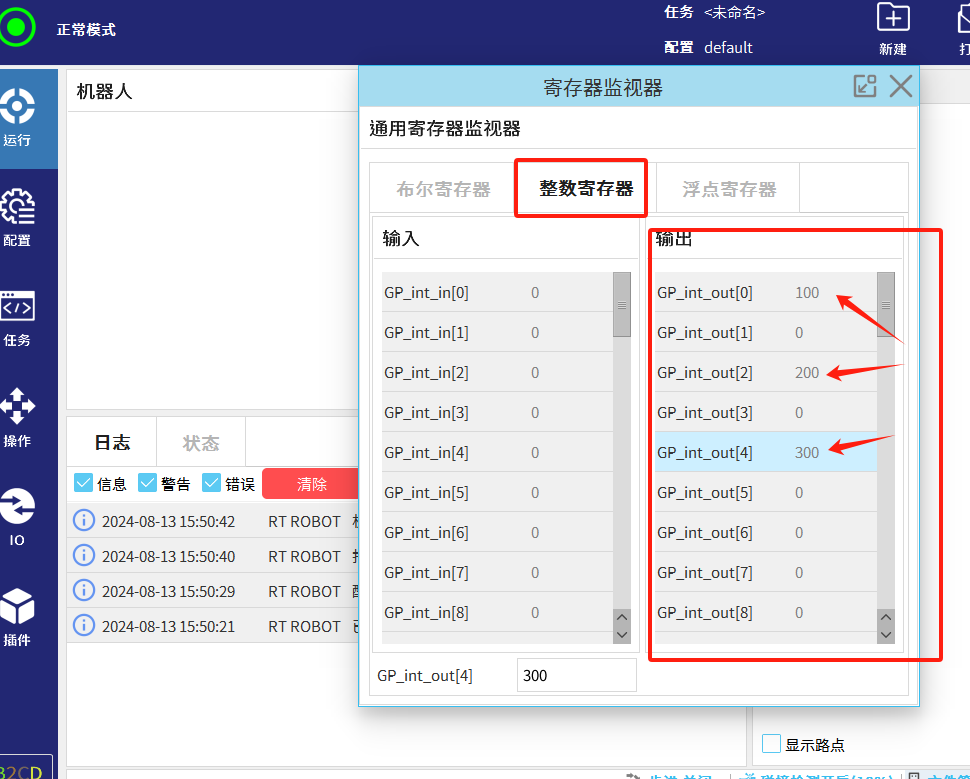
查看codesys输入整型数据
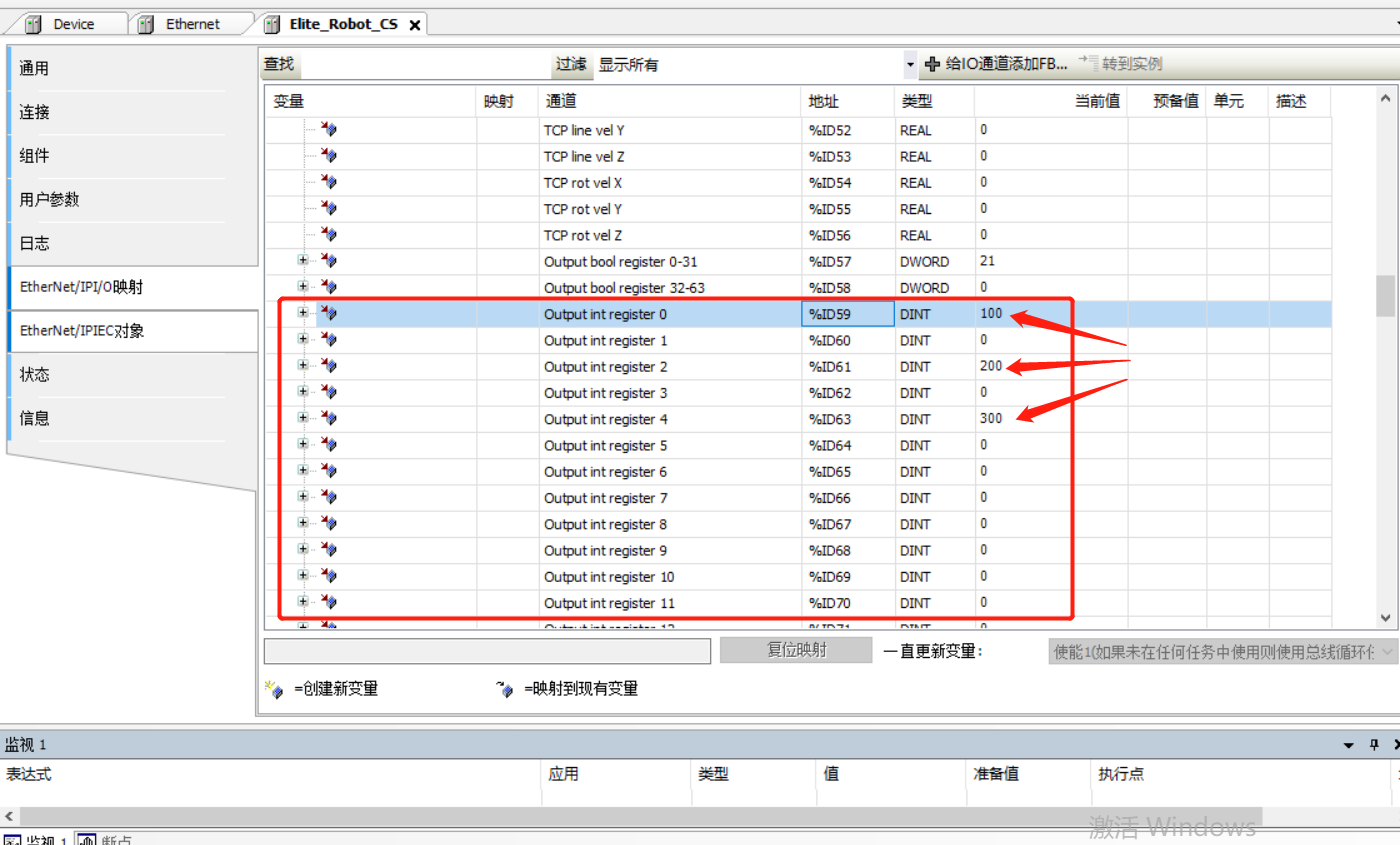
机器人写入整型数据
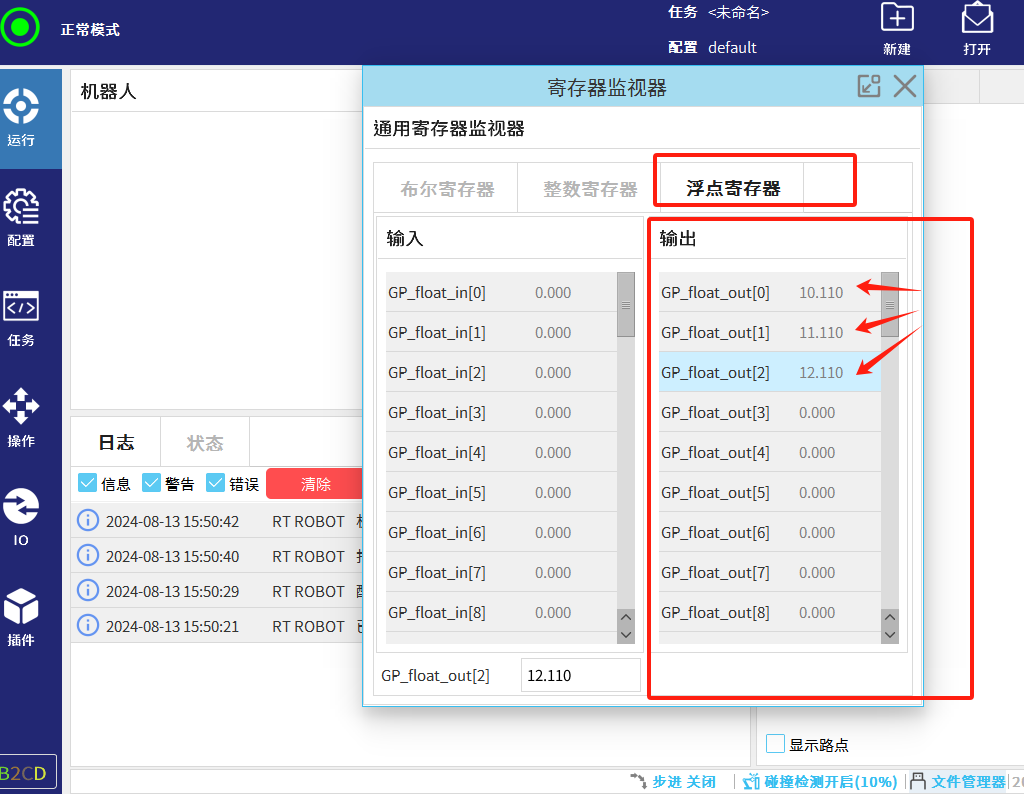
查看codesys输入浮点数数据
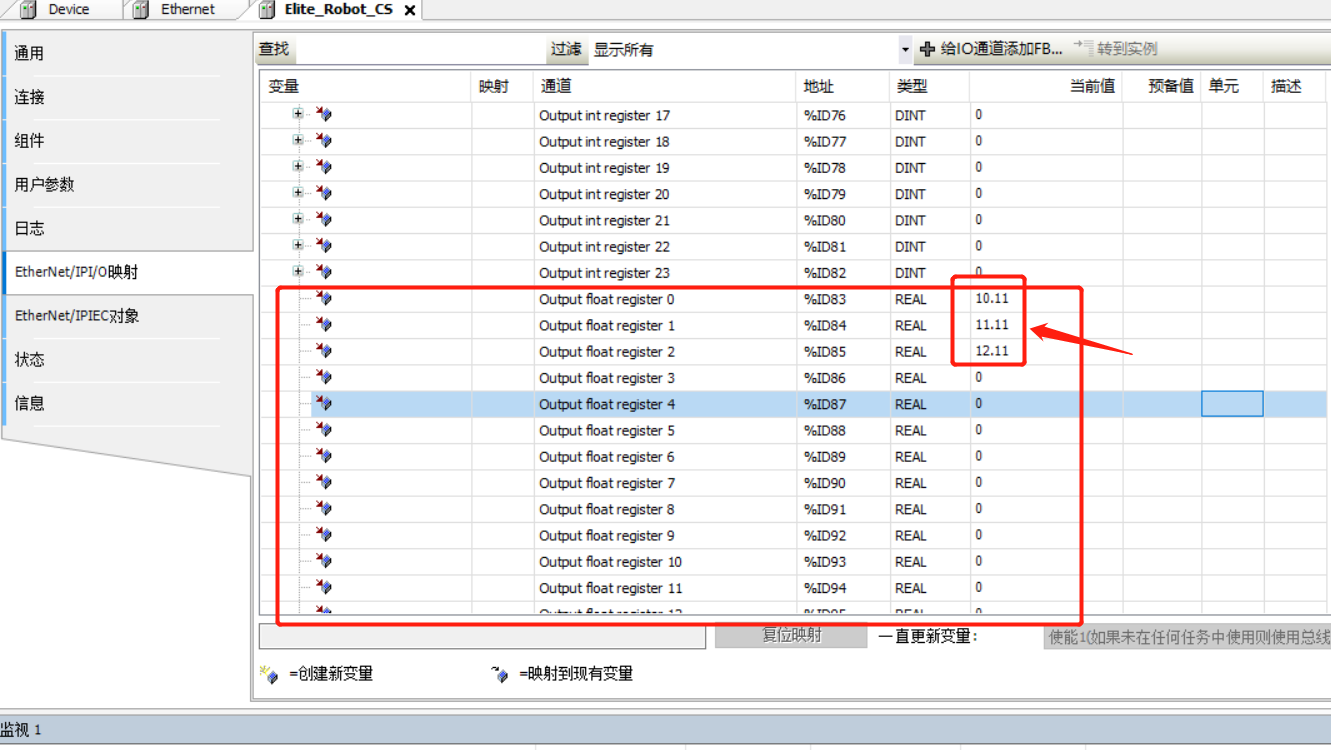
机器人写入浮点数数据
3. 常见问题解答
3.1.如何在机器人里面使用寄存器监视?
使用附件的监视器插件
3.2.第二台机器人通讯异常或者数据不更新
检查网络、IP地址,IO变量使能状态
3.3版本不同使用的eds文件不同,占用内存不同
2.12版本之前eds文件只有一个整体卡槽,包含了整体数据,相对占用内存较高
2.12版本之后eds文件进行了细化,可以根据需要选择对应的卡槽使用,不仅仅局限于整体卡槽
4. 示例
5. 附录
CS_用户手册_EthernetIP数据格式.xlsx
RegisterMonitor-1.2.6.0.elico机器人寄存器监视插件
CS机器人使用EthernetIP教学_哔哩哔哩_bilibili


























