
















CS机器人MODBUS扩展插件使用
1. 简介
项目通常会需要通过modbus通讯来让PLC控制机器人的启动和暂停,还有反馈 机器人的运行,暂停状态等。但是目前通过modbus来实现必须牺牲一个IO,MODBUS扩展插件可规避占用物理IO。
2. 操作流程
2.1. 前期准备下列插件并安装
官网应用下载链接:下载中心_机器人技术-艾利特机器人
https://www.elibot.com/cn/index/listview/catid/38/m/cn/type1/9/type5/196/wd/1/tp/1/p/1.html
安装插件教程:技术文档-艾利特机器人
https://www.elibot.com/service/articles/list?kw=%E6%8F%92%E4%BB%B6%E5%AE%89%E8%A3%85&type1=&type2=&type3=&type4=&type5=&type6=&wd=1&tp=1
安装ExtendModbus插件v1.1.0
安装ExtendIOService插件(扩展IO)v1.5.1
安装IOExtendConfig插件(IO高级配置)v1.2.11.9
安装RegistorMonitor(寄存器监视器)插件v1.2.6.0 ,也可在内部--modbus slave,可以查看状态和控制。
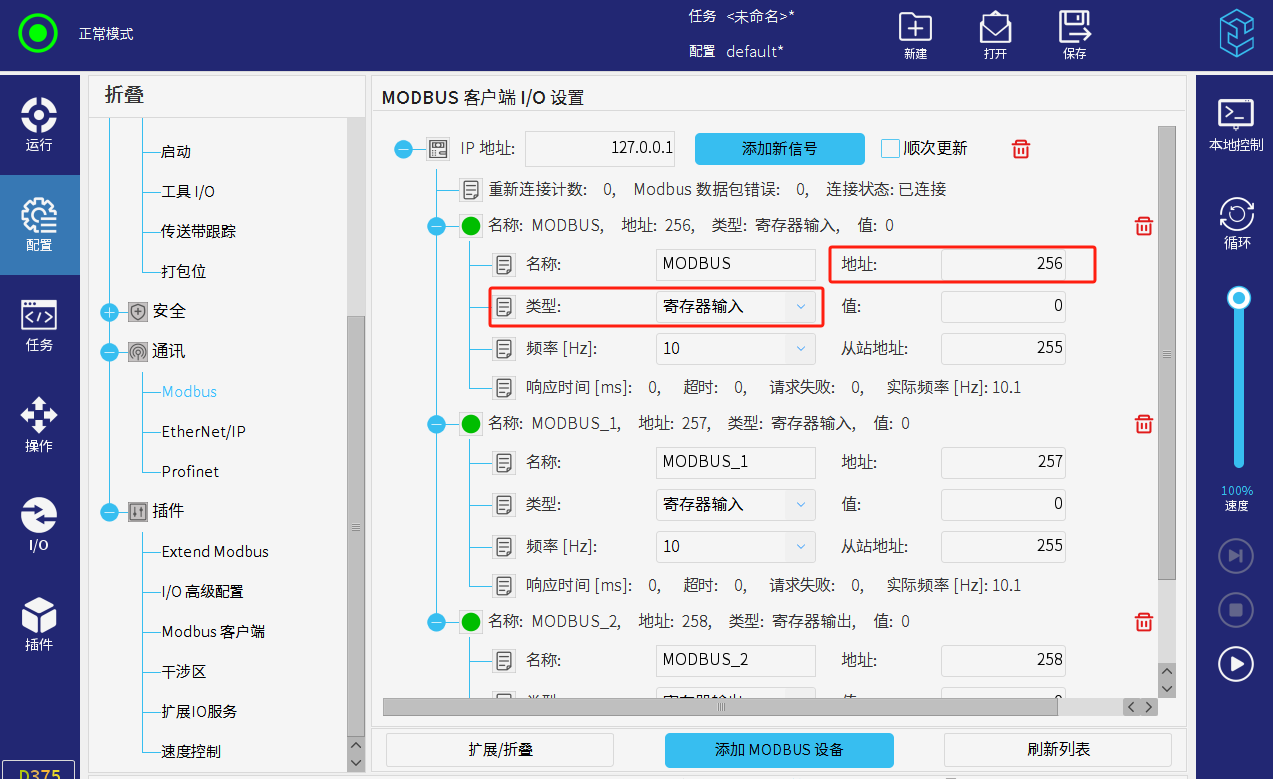
机器人示教器配置--通讯--modbus--添加modbus设备,输入ip(127.0.0.1属于机器人内部mudbus从站内部地址),设置每个信号名称、类型、地址。
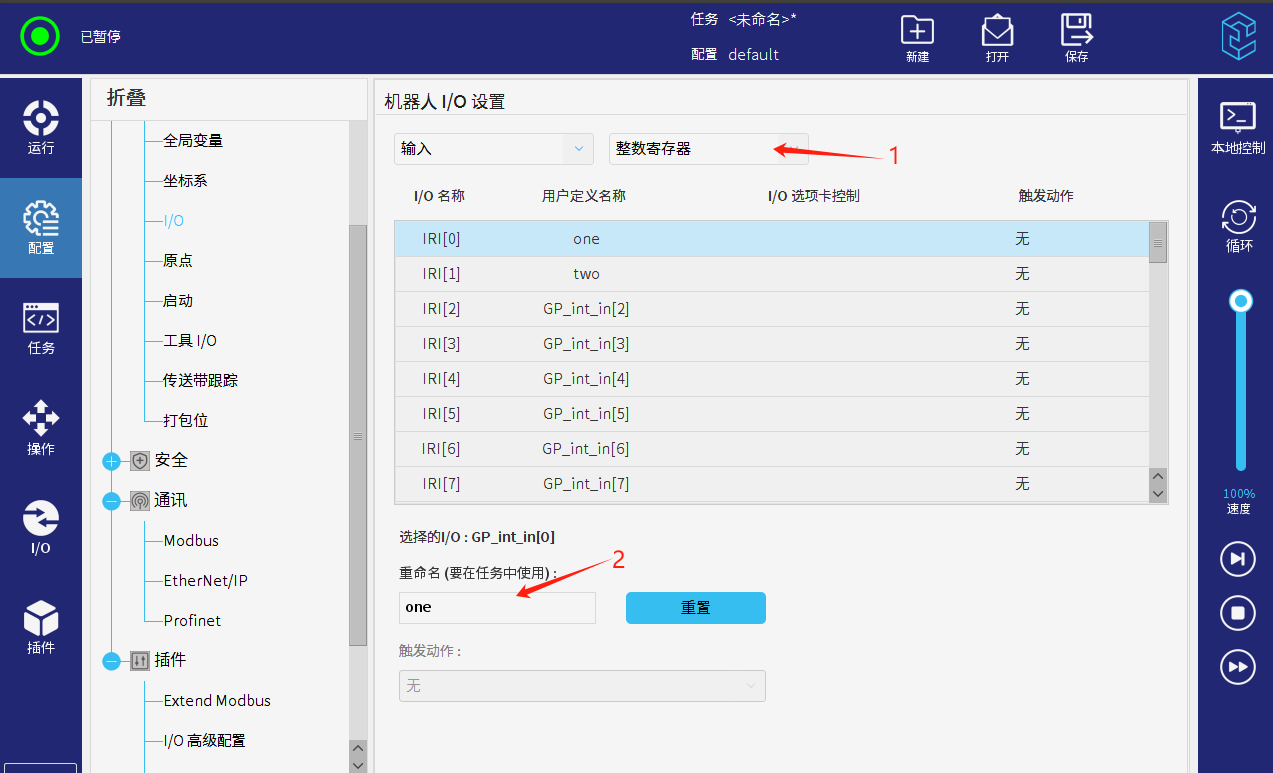
2.2. 配置机器手IO
选择整数寄存器根据项目配置个数,使用需”重命名“
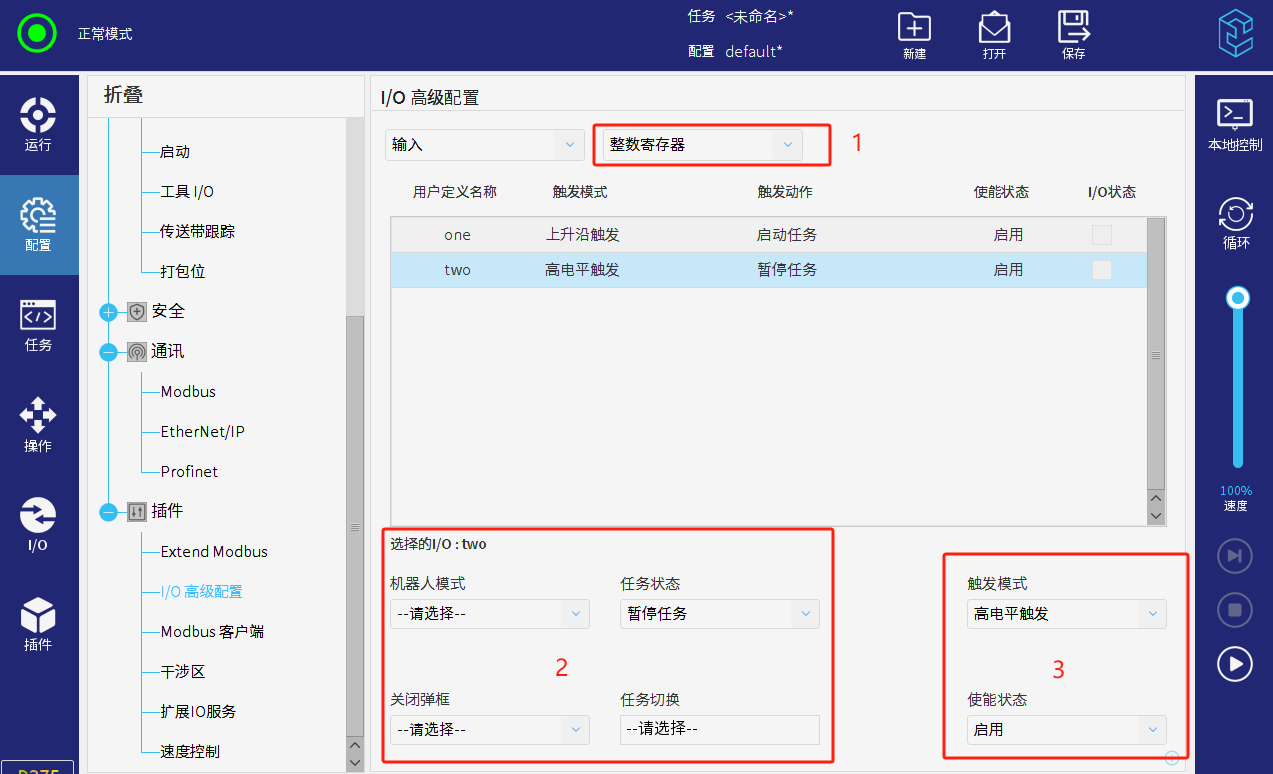
2.3. IO高级配置触发配置
1、切换整数寄存器,选择输入或输出信号
2、选择该信号需要实现的功能(如:机器人上电、下电、释放抱闸、任务启动等)
3、选择触发模式,和使能状态(默认为禁止,需每个手动切换到启用)
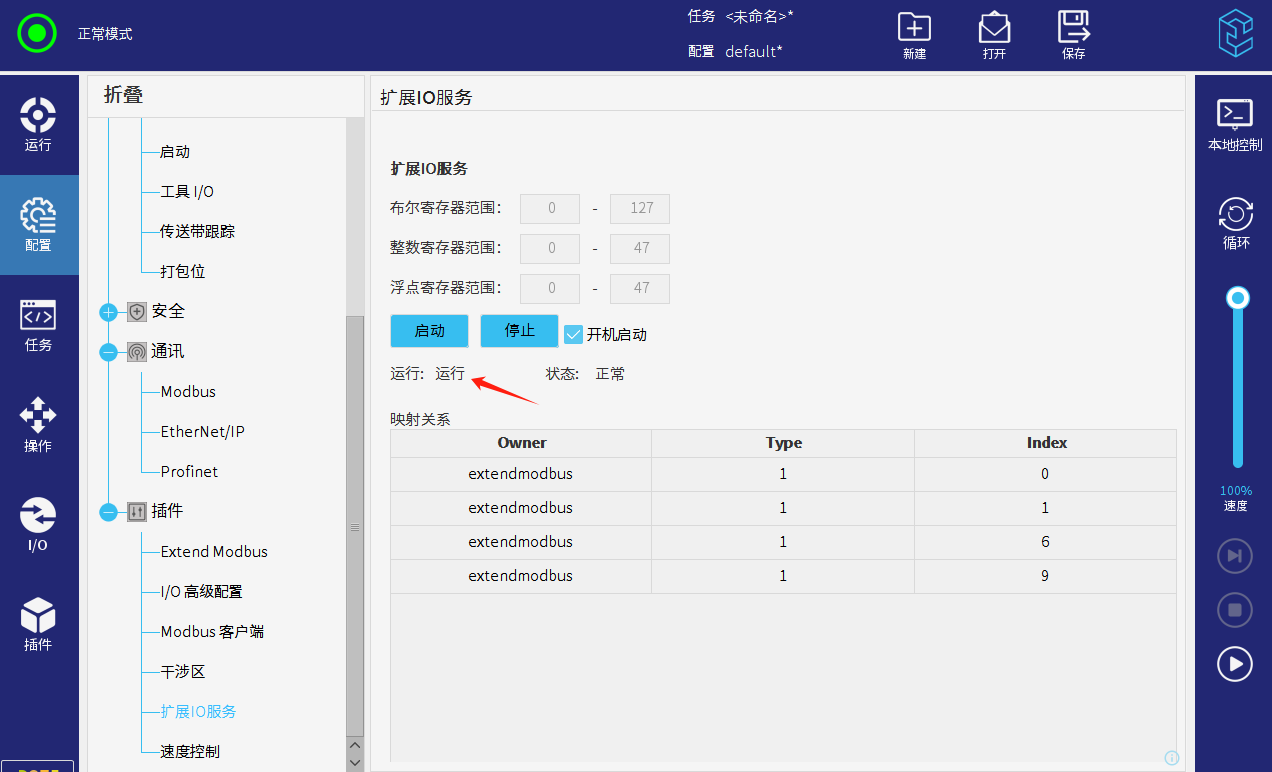
2.4. 映射mudbus与整数寄存器配置
配置 > 插件 > 扩展IO服务。检查是否启用并运行正常,建议勾选开 机自启动。
Owner:占用的类型
Type:寄存器的类型,0 布尔寄存器、1 整数寄存器、2 浮点寄存器
Index:输入整数寄存器的地址位
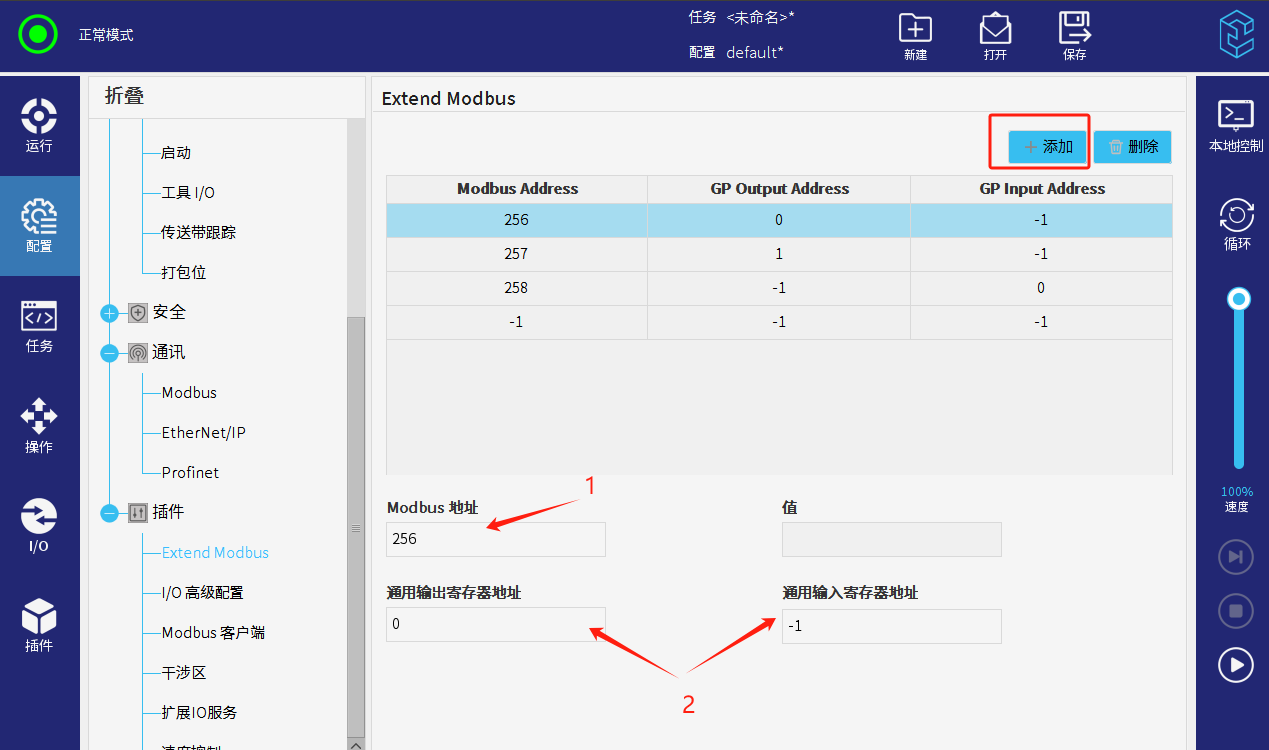
在配置 > 插件 > ExtendModbus,添加modbus寄存器,通用寄存器的映射。modbus可以使用的范围是256-383,通用整型寄存器的范围是0-47
1、 modbus地址位
2、 modbus寄存器输入类型,选择输出绑定整数寄存器输入地址(modbus寄存器输入256 绑定 整型输入寄存器0)
modbus寄存器输出类型,选择输入绑定整数寄存器输出地址(modbus寄存器输出258 绑定 输出整型寄存器0)
3、地址是-1是默认值,表示未更改的
接下来可以使用modbus主站客户端或plc测试触发是否正常
3. 常见问题解答
1. I/O高级配置页面需要信号确认名称和类型后,才会显示。使能状态注意切换,默认都是禁止。
2. 通用整型寄存器的范围是0-47(不使用总线时)或24-47(开启总线时)
4. 示例


























