
















CS机器人查看当前关节力矩
2025-09-08
1. 简介
机器人示教器暂无当前关节力矩数值可视化,可通过关节电流,以及指令获取当前关节力矩;
2. 操作流程
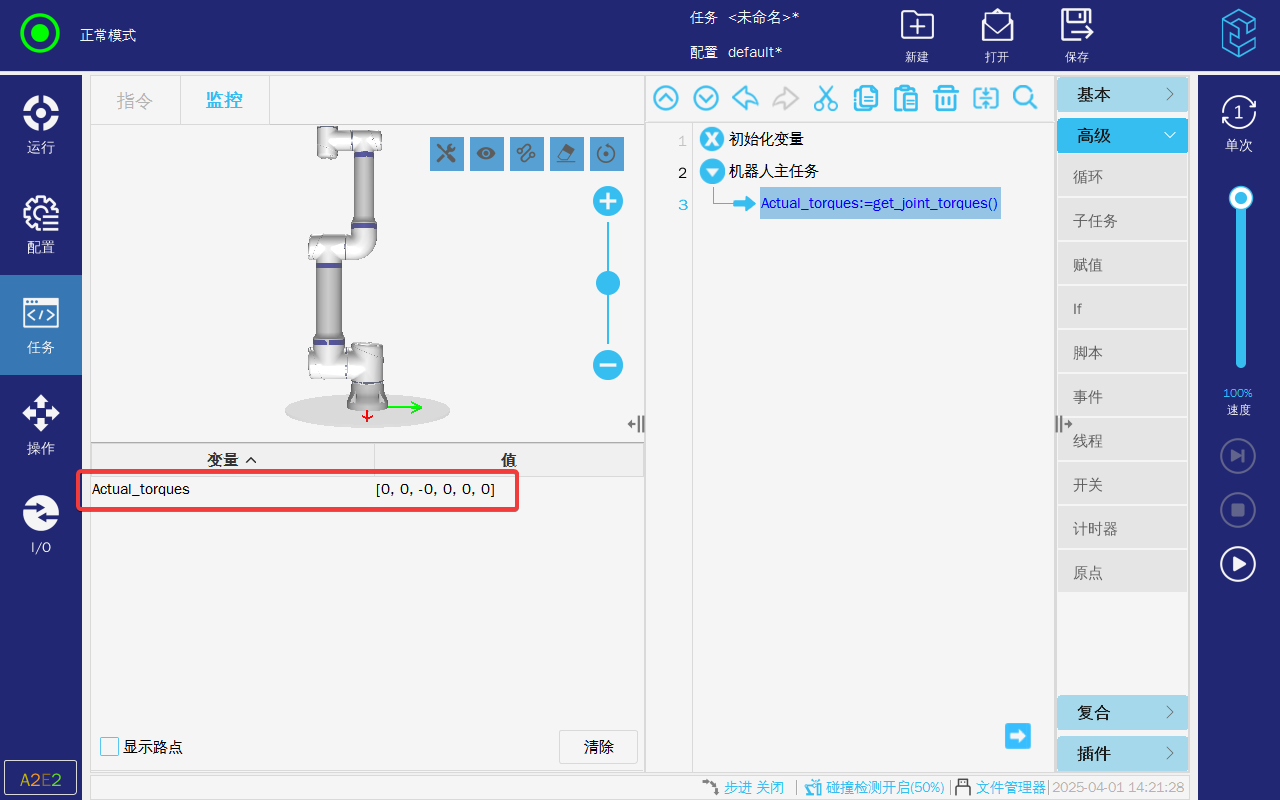
2.1 指令获取
通过指令:get_joint_torques() 获取1-6关节的当前关节实际力矩,单位Nm;
2.2 关节电流转换
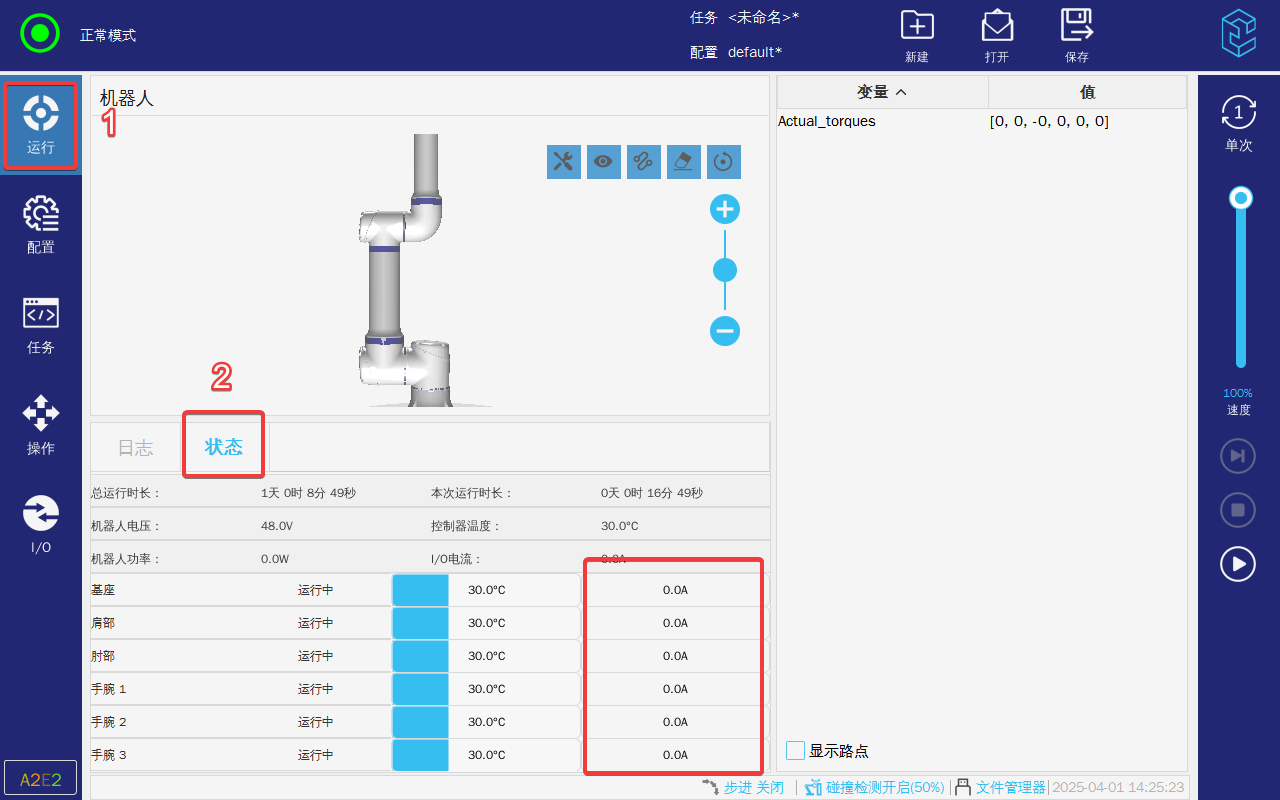
1、 电流监控界面
点击运行-状态后查看电流监控界面,实时显示当前各关节电流;
2、 电流与力矩转换
关节力矩(N.m)=(关节电流/关节额定电流)*额定力矩*减速比
用CS612关节2肩部关节为例,已知:关节额定电流=19.1A
额定力矩=3.58N.m
减速比=121
计算:关节力矩M=关节电流 I*3.28*121/19.1=关节电流 I*22.679
每个关节电机的减速比会有差异,CS612各关节综合计算公式为:
基座关节力矩(N.m)=关节电流 I*22.679
肩部关节力矩(N.m)=关节电流 I*22.679
肘部关节力矩(N.m)=关节电流 I*16.376
手腕1关节力矩(N.m)=关节电流 I*13.538
手腕2关节力矩(N.m)=关节电流 I*13.538
手腕3关节力矩(N.m)=关节电流 I*13.538
3. 常见问题解答
1、 各电机额定电流可在专家模式-伺服参数-0x64查看
2、 建议电机峰值电流不超过额定电流1.5倍,19.1A*1.5=28.65A;
4. 示例
5. 附录


























