















EC机器人101报警处理
2025-09-08
1.简介
本文档对于EC伺服版本V11.48在机器人正常情况,工具负载安装方式都正确,动力学碰撞没有报警的情况下会误报101碰撞报警。对其屏蔽伺服参数。
2.示列
2.1打开参数设置-关节伺服,进入伺服参数界面找到0051参数
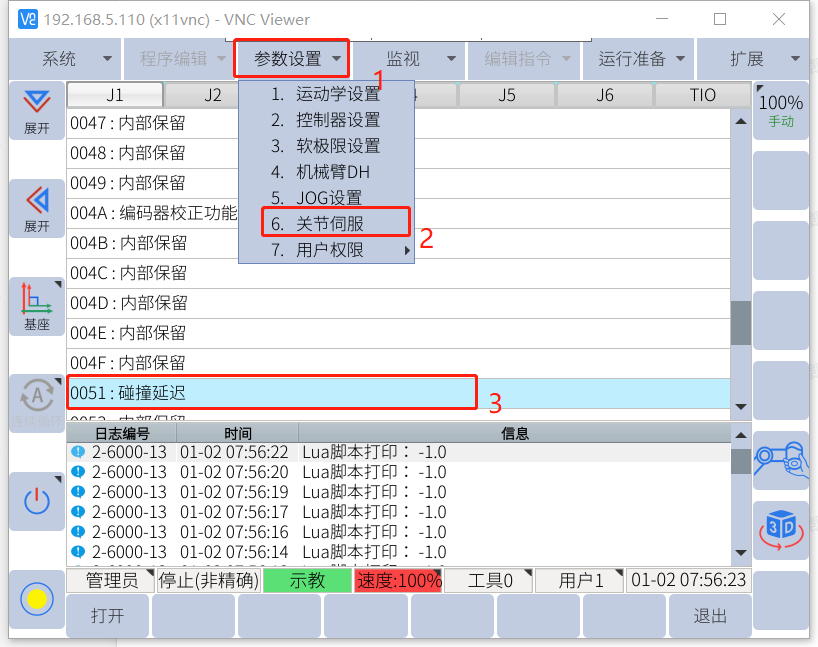
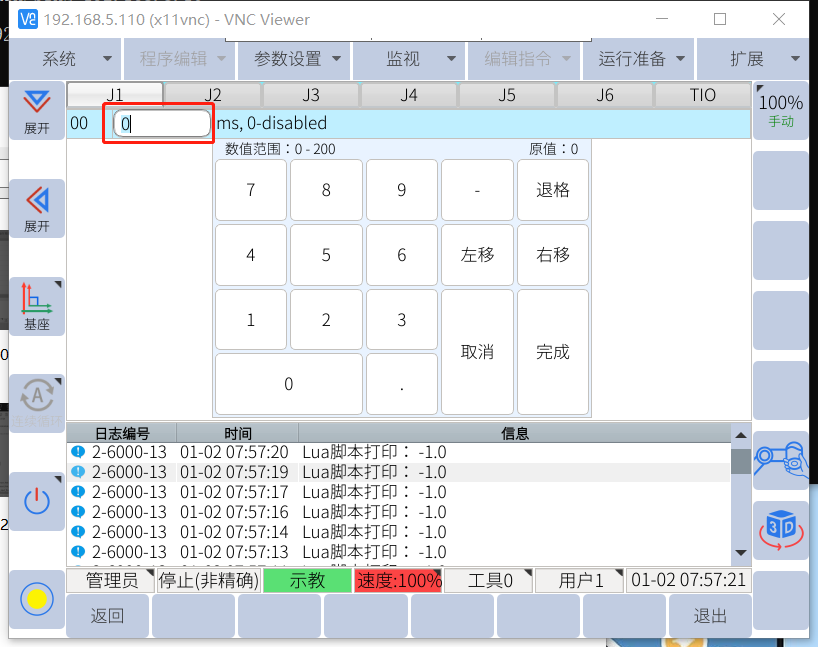
将0051的参数改成0并保存。
参数设置-关节伺服-打开0032参数写入5进入保存.
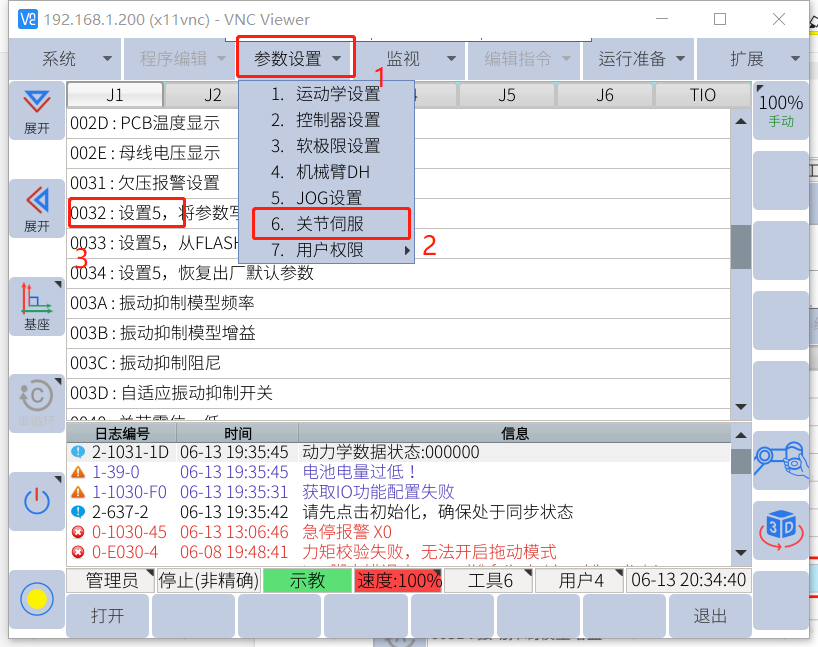
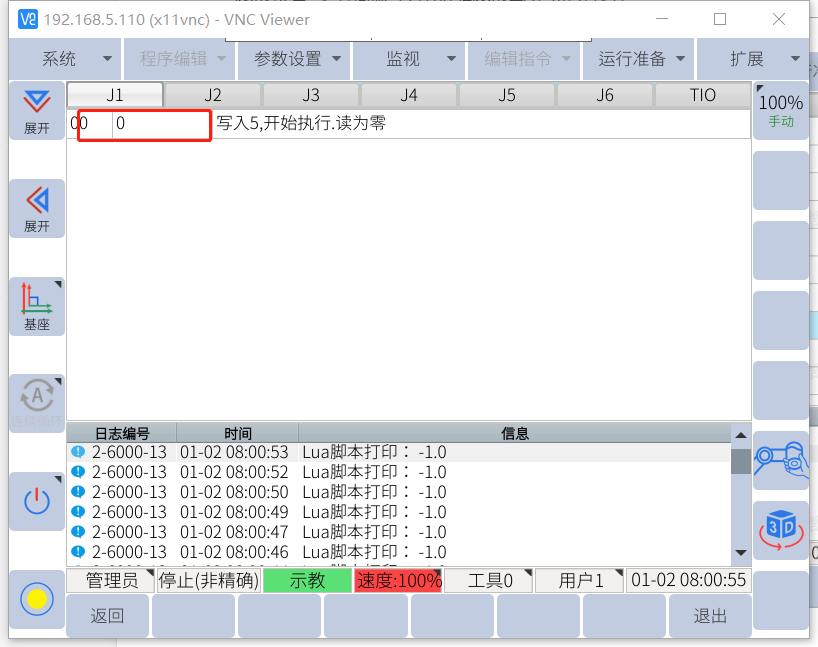
提示写入成功后重启生效。
2.2 或者升级其他版本系统。

1.简介
本文档对于EC伺服版本V11.48在机器人正常情况,工具负载安装方式都正确,动力学碰撞没有报警的情况下会误报101碰撞报警。对其屏蔽伺服参数。
2.示列
2.1打开参数设置-关节伺服,进入伺服参数界面找到0051参数
将0051的参数改成0并保存。
参数设置-关节伺服-打开0032参数写入5进入保存.
提示写入成功后重启生效。
2.2 或者升级其他版本系统。


























