
















EC机器人掉臂问题处理
2025-09-08
1. 简介
该文档主要针对当机器人断电后出现掉臂或者外力能够推动机器人时排查故障指导。目前EC机器人抱闸机构采用的为机械抱闸,由弹簧、销钉、电磁铁组成,原理为当机器人上电时,电磁铁吸合,抱闸打开,当机器人掉电时,电磁铁失电,弹簧弹出,锁住机器人,当出现掉臂或者外力能够推动机器人时大概率为抱闸机构异常。
2. 操作流程
2-1.拆开关节
目前EC端盖有2种型号,带胶圈与不带胶圈,目前最新型号均不带胶圈,如下图:

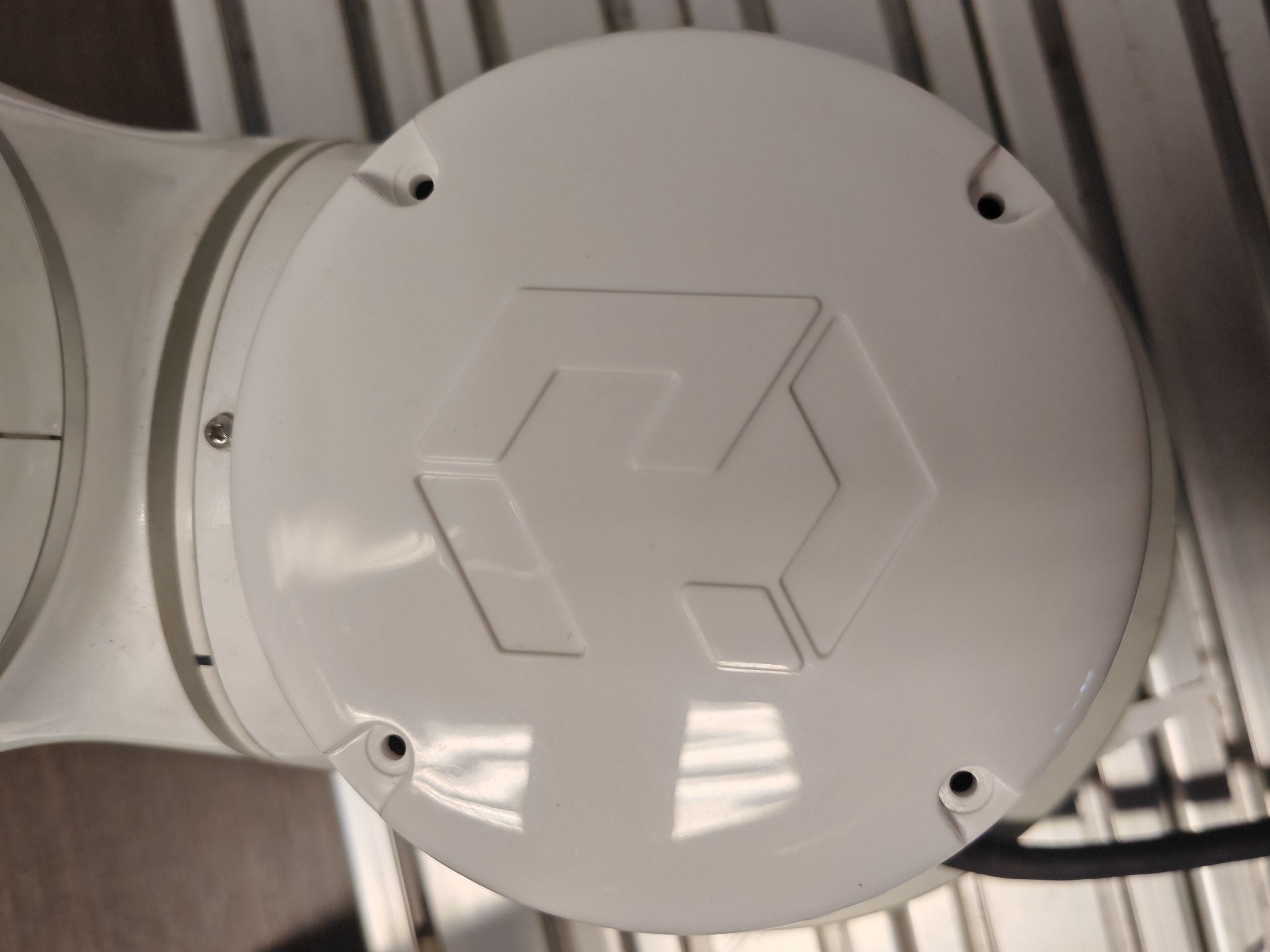
不带胶圈的直接拧掉外面4颗螺丝即可,带胶圈需要先将胶圈拆掉后才可看到螺丝,如下图:

2-2.检查抱闸
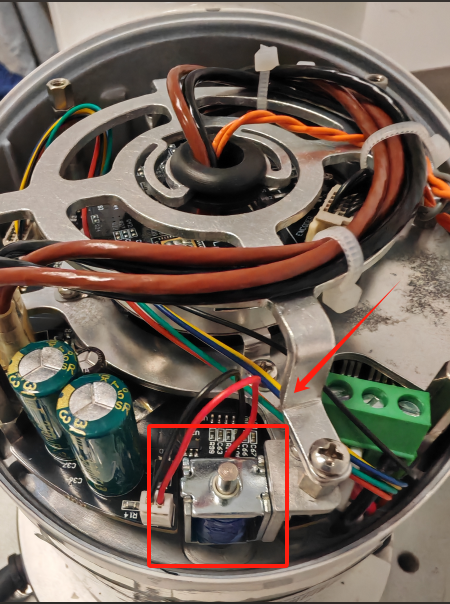
拆开端盖前需要对机器人进行断电,当拆开端盖后找到抱闸机构,如下图:
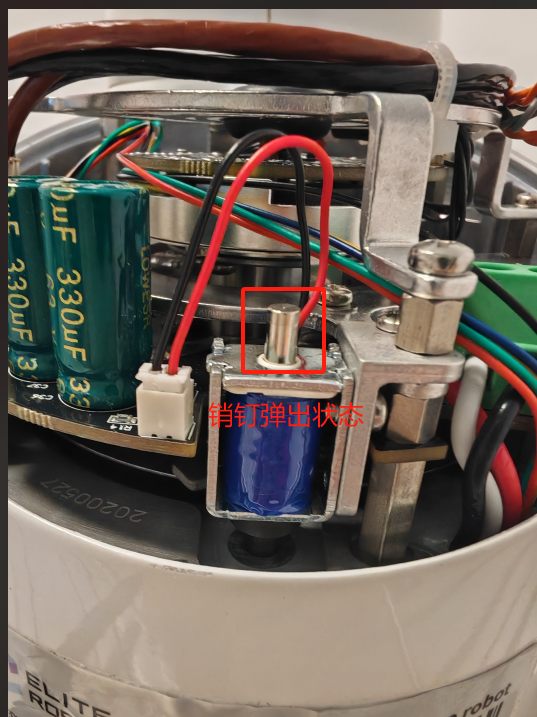
当机器人断电后抱闸机构关闭状态(销钉弹起),如下图:
当机器人本体上电后电磁铁吸合,销钉会处于吸合状态,如下图:
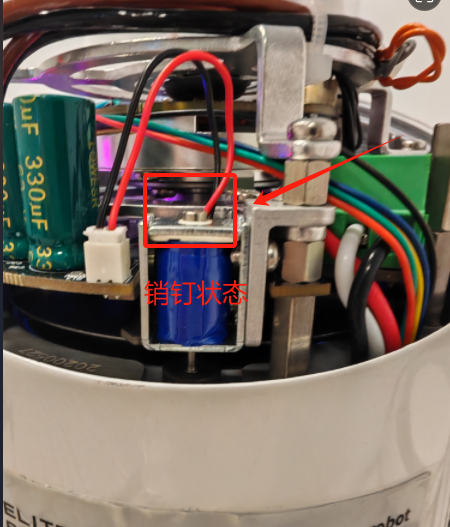
对比上图两种状态,当机器人断电销钉未弹出时大概率为弹簧故障,当机器人上电销钉未下落时大概率为电磁铁故障。
3. 常见问题解答
3-1.问:如果观察时为异常
答:可以在机器人断电情况下手动按压或者上拨销钉,看看是否存在没有完全到位,拨动销钉时确保机器人安全,手动释放抱闸注意机器人掉臂风险,如下图:



























