EC机器人工具力超限报警处理
2025-09-08
1. 简介
在某些情况下会出现“肘部力或者工具超过安全限制”的提示,会暂停运行的程序。
2. 操作流程
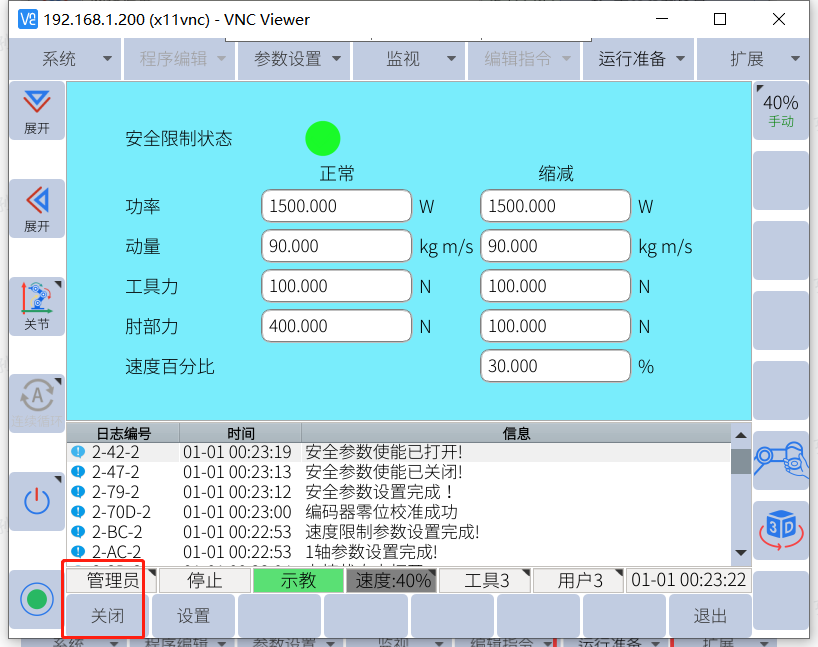
点击运行准备--安全配置---安全限制,
可以先调大参数,如果不行再关闭安全限制状态即可。
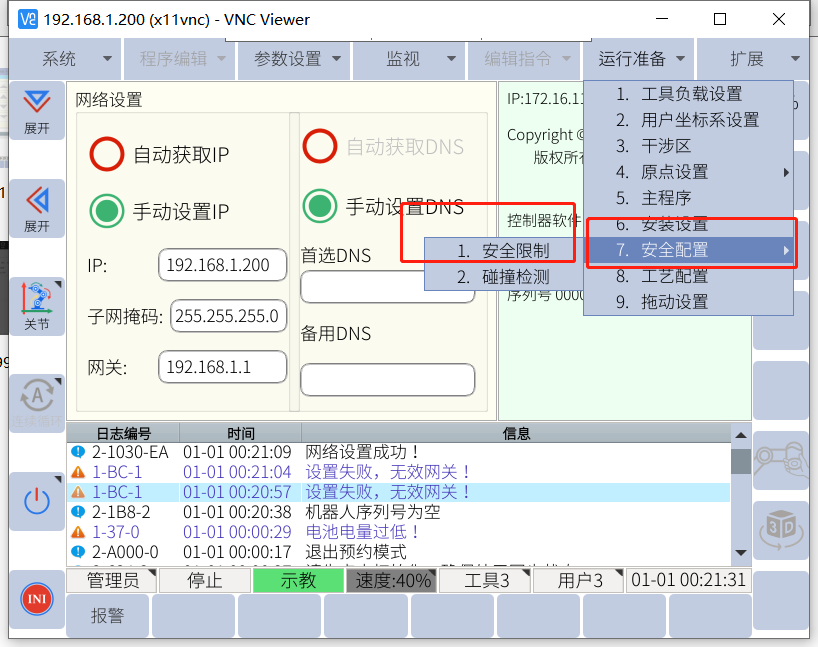
建议使用碰撞检测功能。
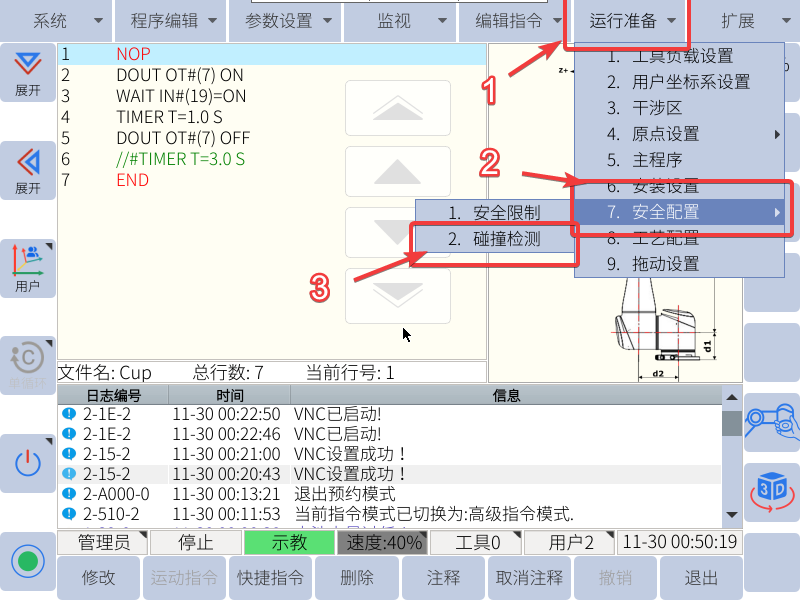
点击运行准备——安全配置——碰撞检测;
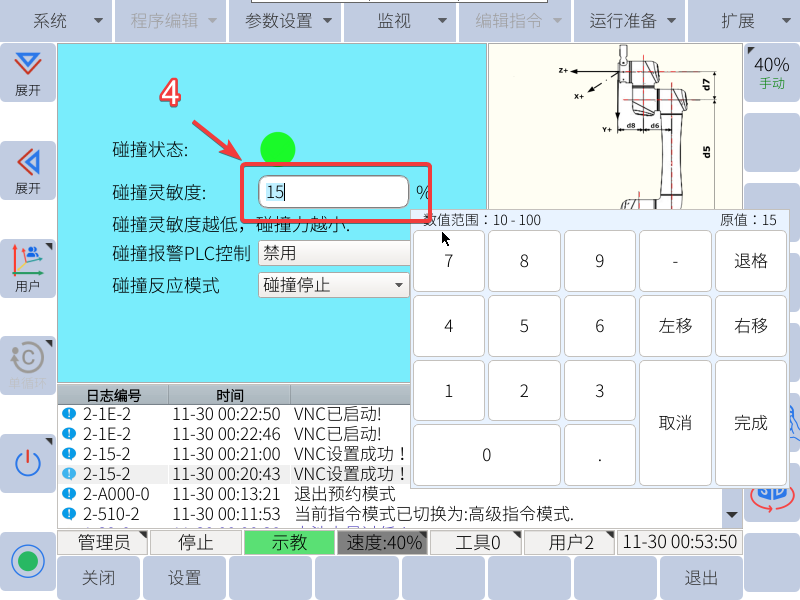
点击设置碰撞灵敏度(数值范围10-100)
tips:机器人开启碰撞检测后,灵敏度设置的越小,代表机器人越灵敏,触发机器人“碰撞检测报警”所需要的力便越小,碰撞检测是检测电流的大小,灵敏度设置过高,易引发碰撞报警误报,可根据实际情况,设置合适的灵敏度值。
注意:需要在管理权权限下操作,密码:333333