EC机器人中JBI编程使用规范
1. 简介
JBI编程主要分为三个步骤:
1.新建程序
2.程序编写
3.执行程序
2. 操作流程
一. 新建程序 ( 不能以jbi命名)
在示教器主页面下点击左下角新建-文件-输入文件名-选择并打开
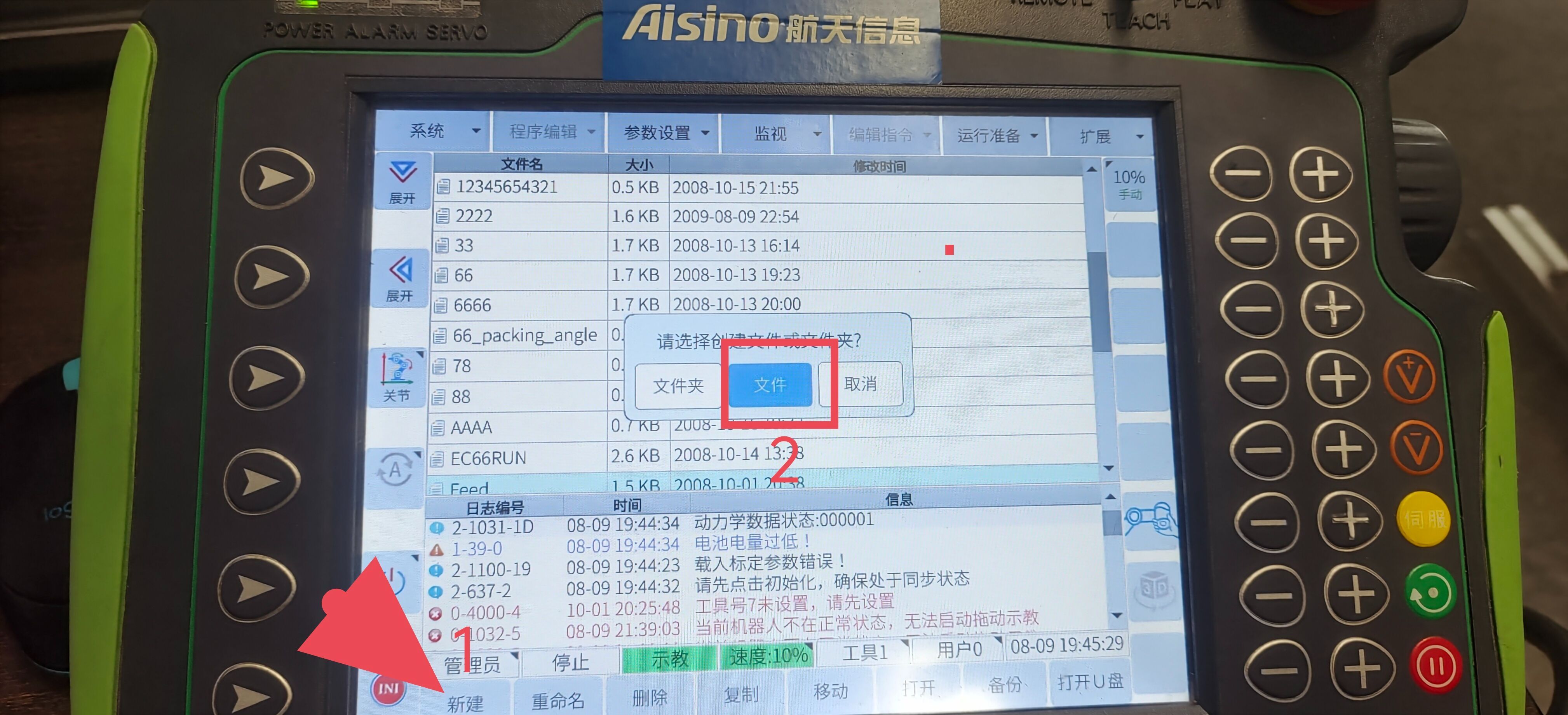
图.1
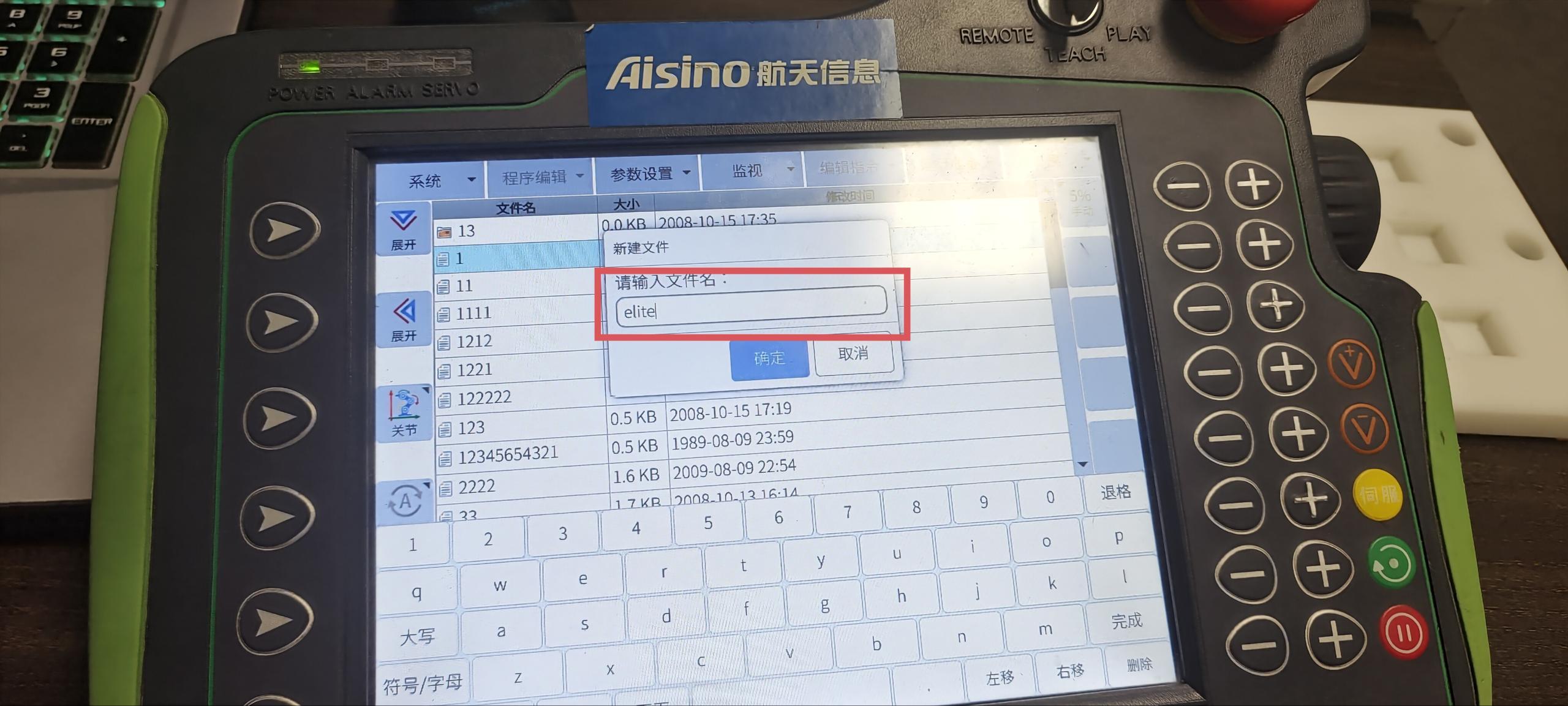
图.2
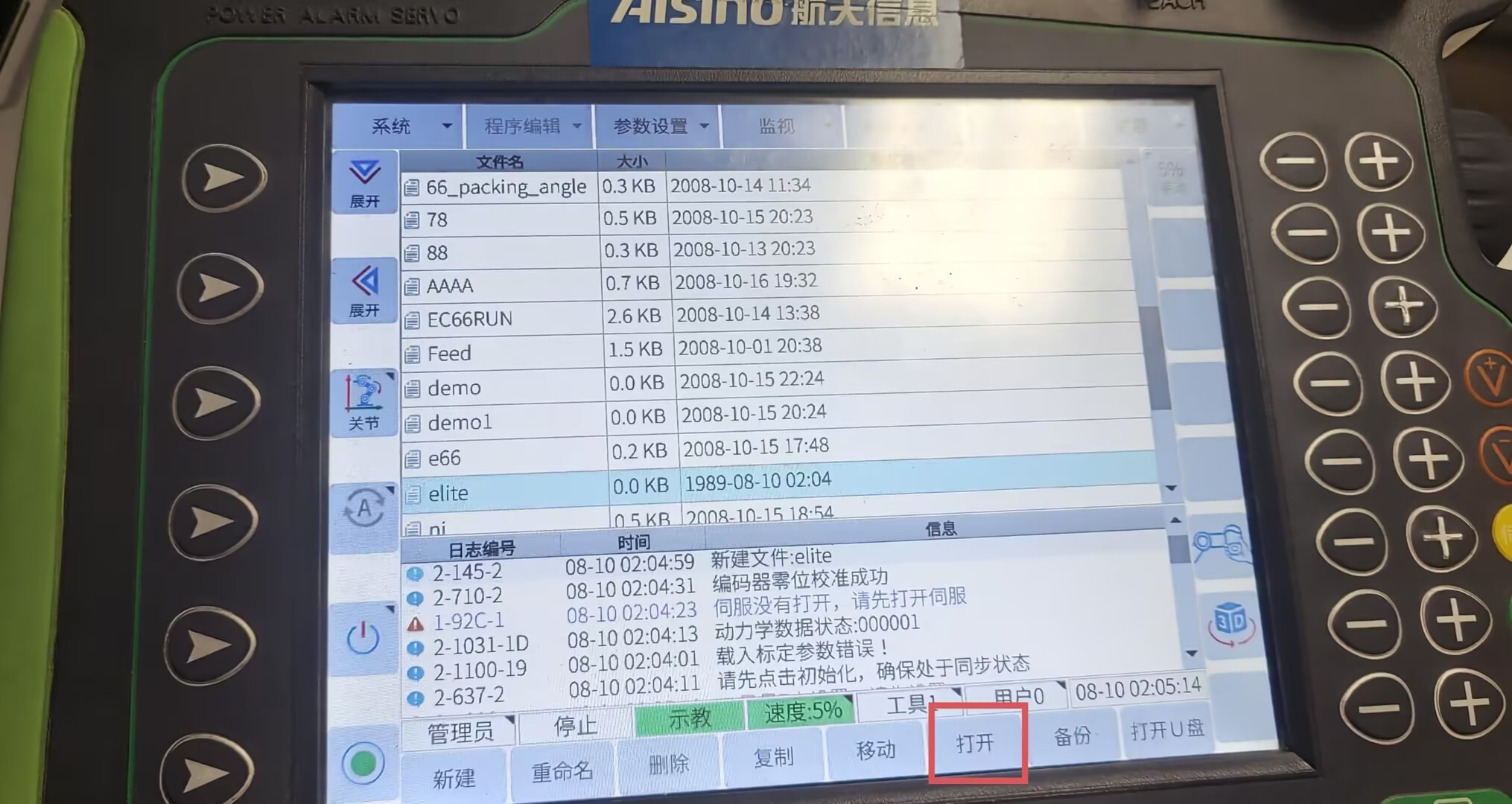
图.3
二.程序编写说明
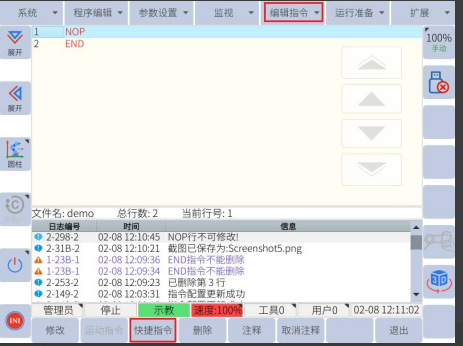
要插入命令,找到主菜单栏并单击“编辑指令”选项卡。以下命令类别可用:
1. 输入输出 2. 逻辑控制 3. 运算指令 4. 赋值取值 5. 码垛指令 6. 脚本操作 7. 其他指令 8. 移动指令
除移动指令外,所有指令的插入方法均相同。
1.在程序编辑页面,将光标移动到要插入指令位置的前一行。
2.然后按主菜单下的“编辑指令”或“快捷指令”在子菜单区选择要插入的指令
3.编辑完附加项目后,按“确定”插入指令。
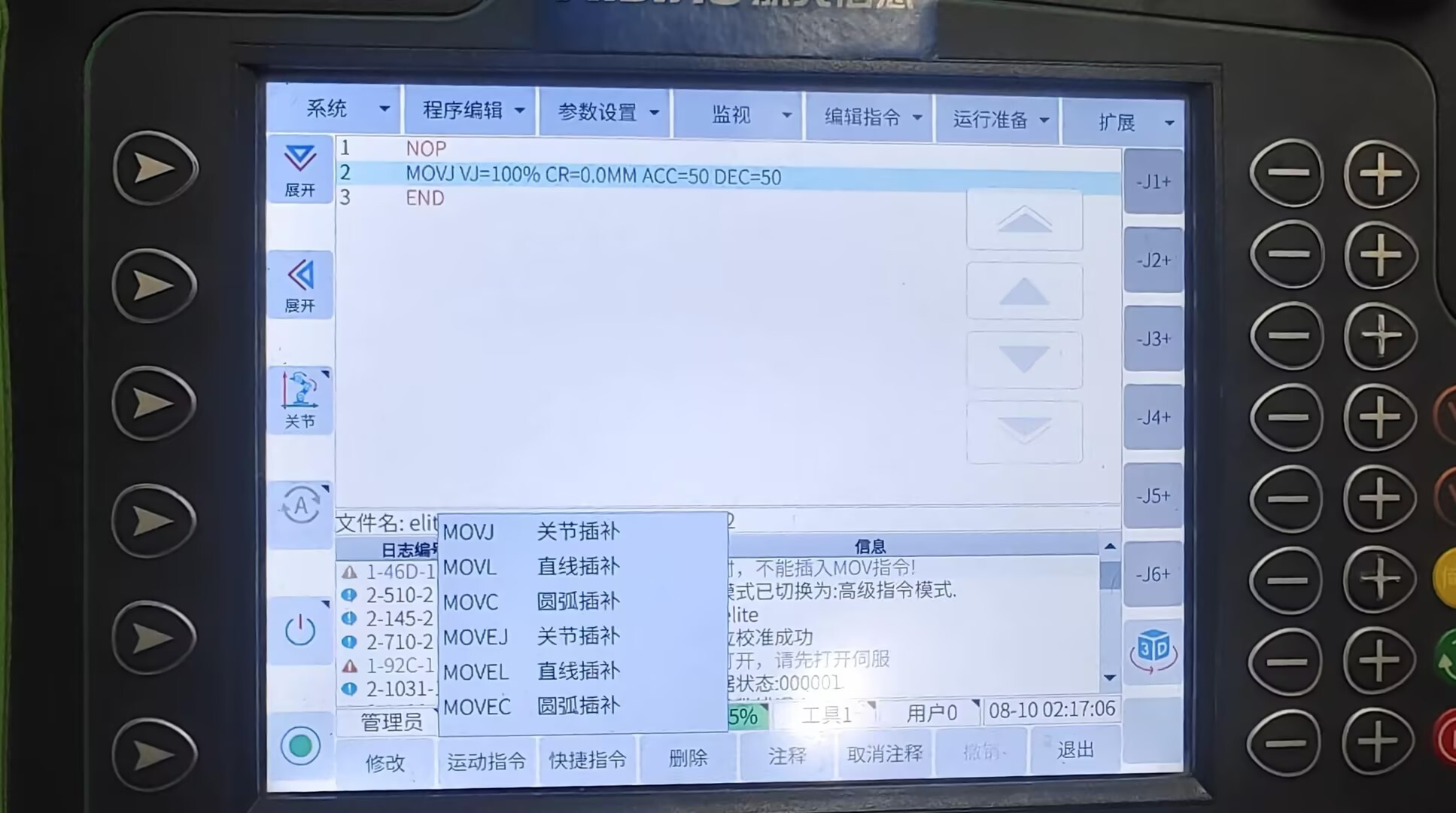
插入移动命令的详细步骤如下:
1. 使用拖动示教或单关节轴运动按钮将机器人移动到所需位置。
2. 将程序光标移动到要插入移动指令的位置之前的行。
3. 按住三位使能开关 - “SERVO”指示灯将亮起。
4. 单击子菜单栏中的“运行”或选择 编辑指令 -> 移动指令,然后在下拉菜单中选择所需
的移动方法。
5. 选择移动指令后,编辑参数,按“确认”插入。
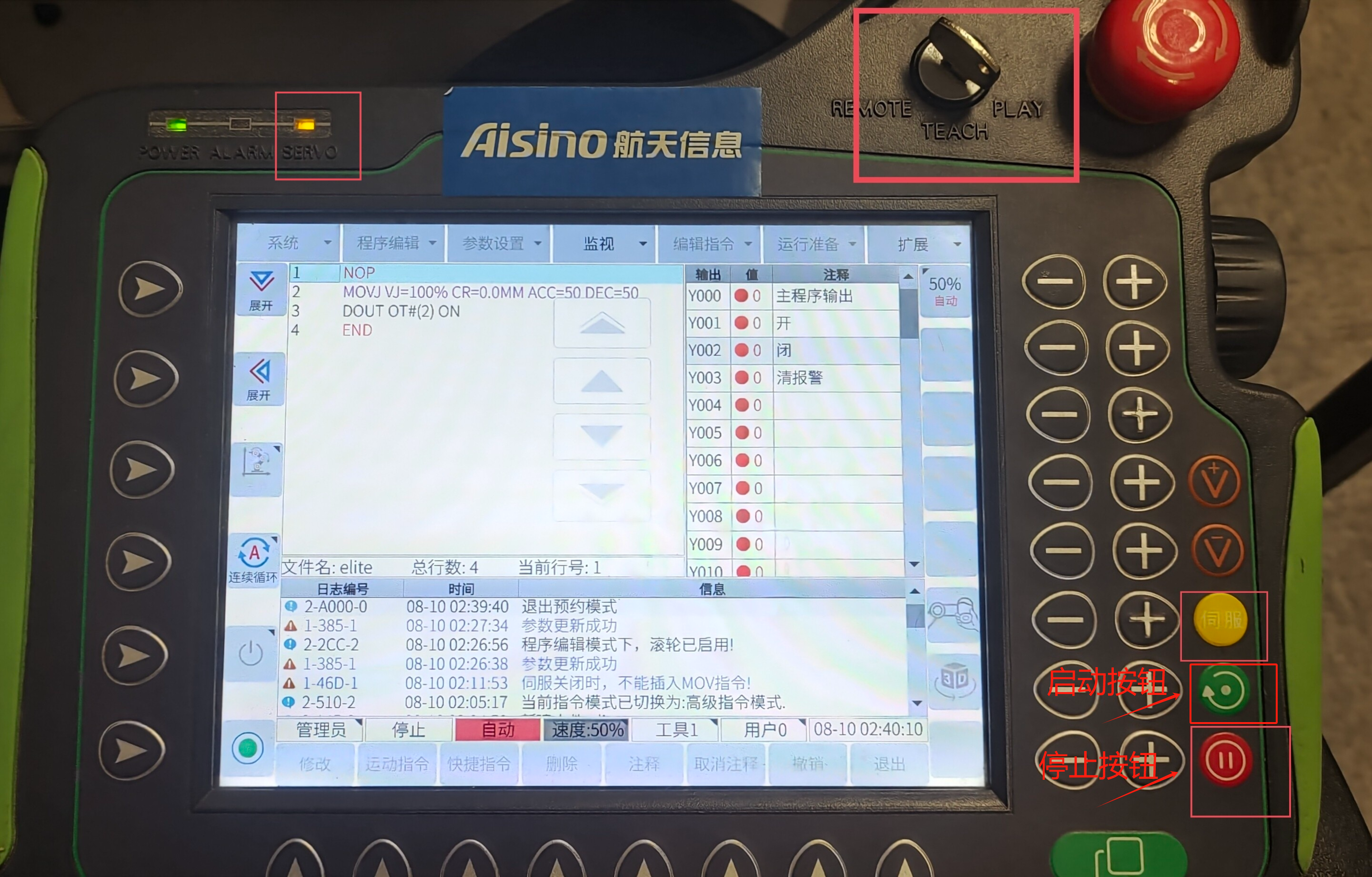
三.执行程序
切换到自动(PLAY)模式,按状态控制区的图标可选择三种机器人操作循环之一:
单步:每按一次运行按钮仅执行一行指令,不执行非运动指令。
单循环:执行一次程序。如果按下“程序启动”按钮,程序将再次执行。
连续循环: 连续重复一个程序。
执行程序前,首先在程序列表中选择要执行的程序,在子菜单区按“打开”键打开程序, 切换到自动(PLAY)模式,将光标移动到程序的起始行。通常,程序从 NOP 行开始执行。
完成上述所有准备工作后,首先按下示教器右下角的“伺服使能”按钮 。伺服使能
时,SERVO 指示灯亮。按绿色按钮程序启动 , 红色按钮是程序停止。