
















EC日志解读
1. 简介
本文用于通过日志排查机器人状态。
2. 操作流程
2.1机器人运行日志备份(基于 V3.10.2 系统版本)
将U盘插入控制柜USB接口(U盘格式为FAT32)
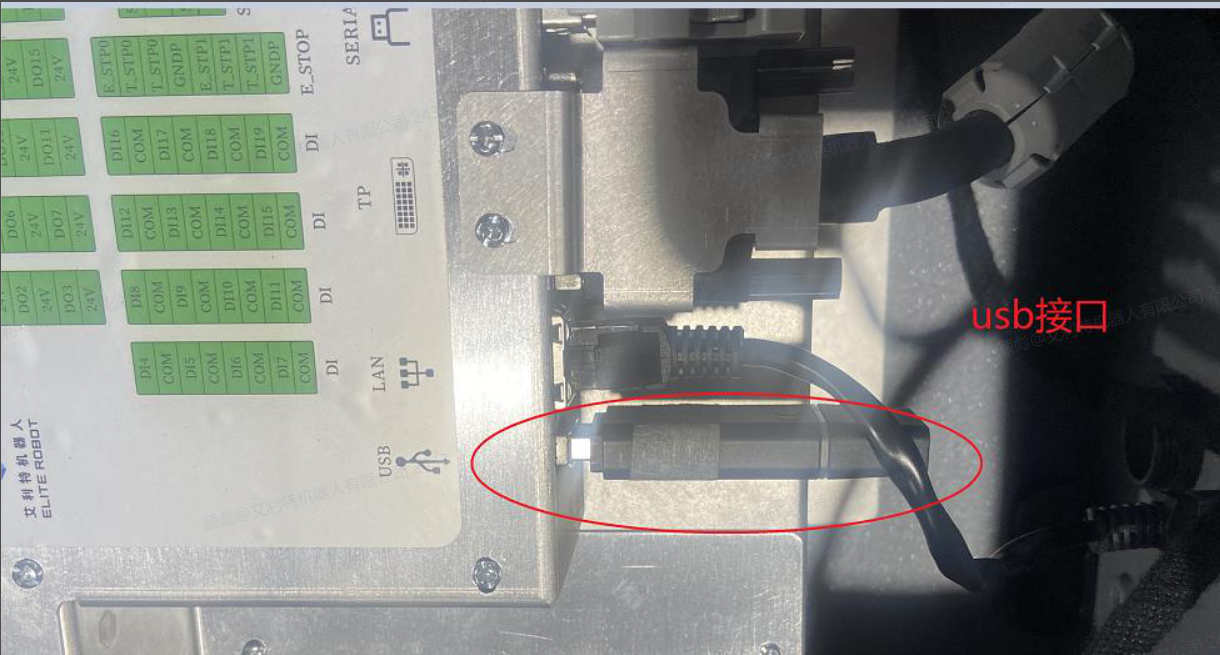
在示教器上可以检查机器人是否识别到U盘
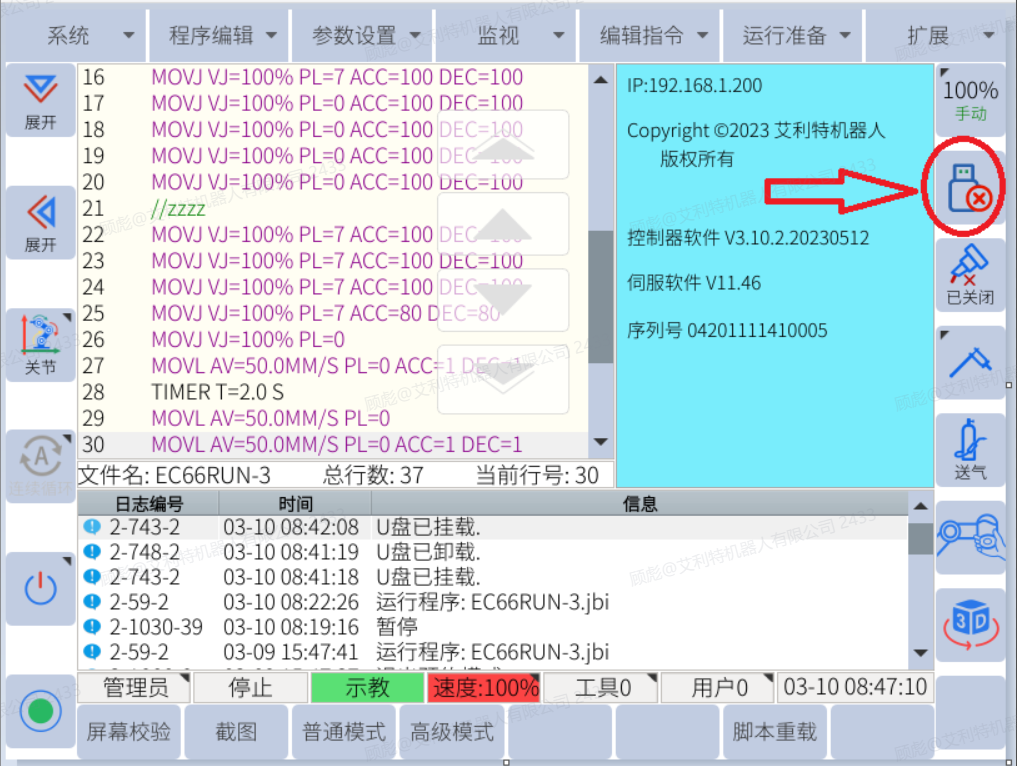
日志备份
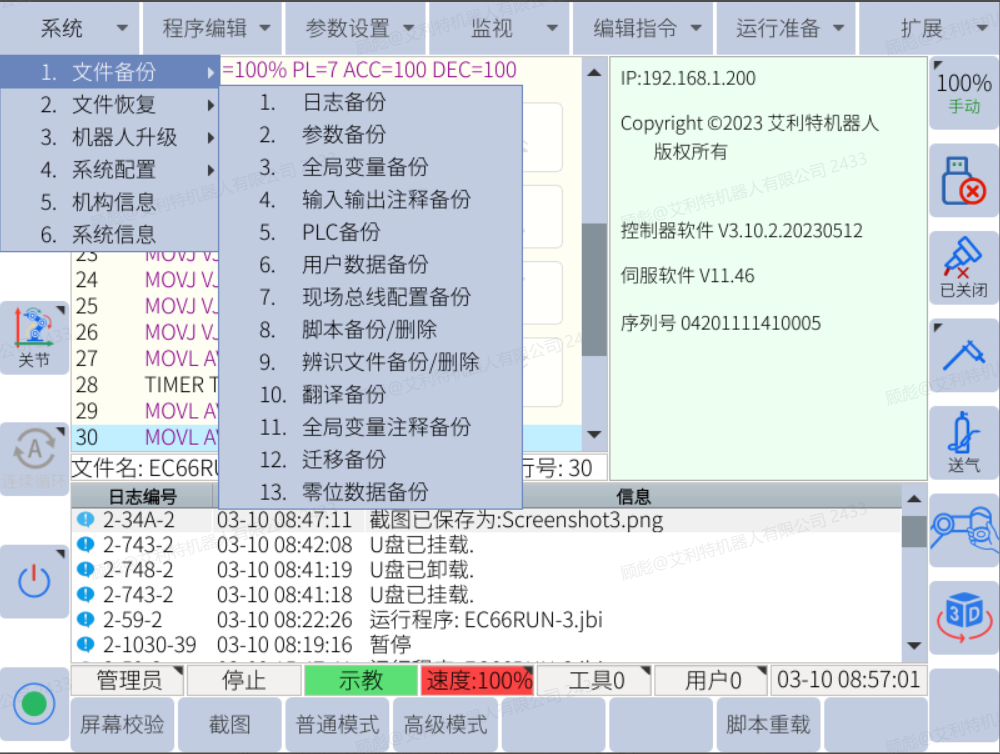
首先确认U盘里没有rbctrl文件夹,否则日志信息会覆盖
系统→文件备份→日志备份→确认(如果U盘里有rbctrl文件夹则确认覆盖)
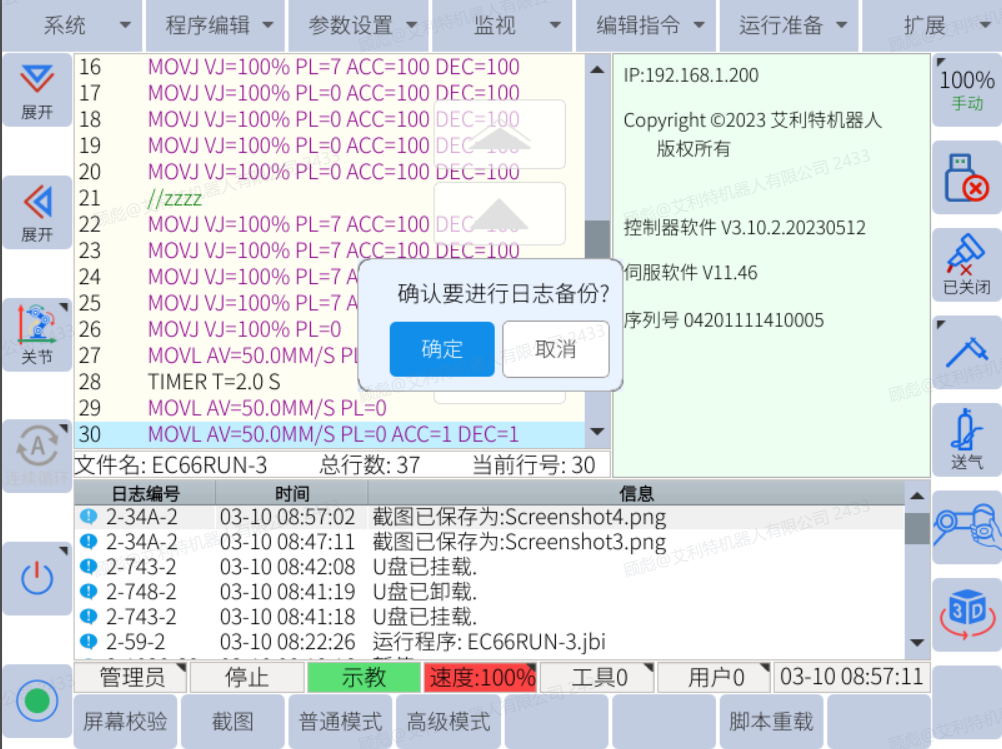
日志备份成功
2.2查看日志
打开U盘→打开rbctrl文件夹,找到mcserver文件,可以用记事本或者Excel打开。该文件中保存有机器人所有的日志信息。
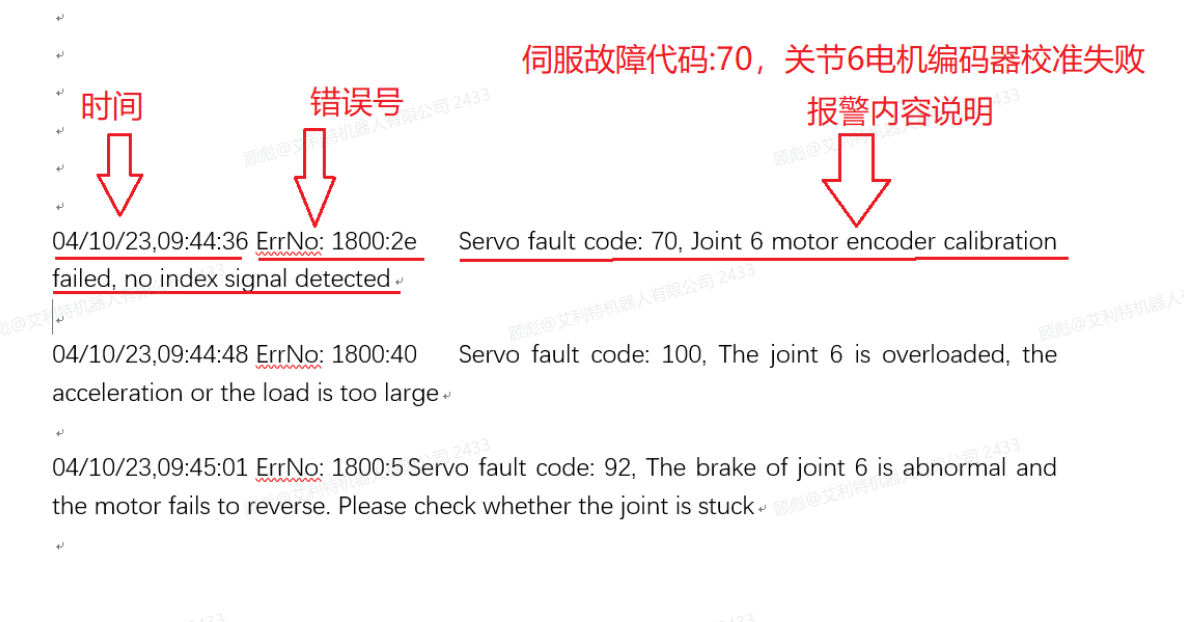
1、mcserver-all
mcserver-all为文件报警内容
EC系列伺服报警列表V1.1.xlsx
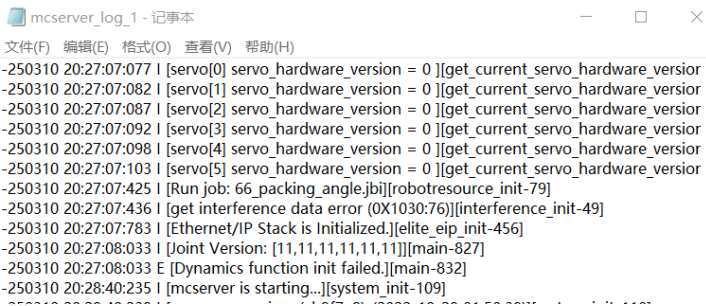
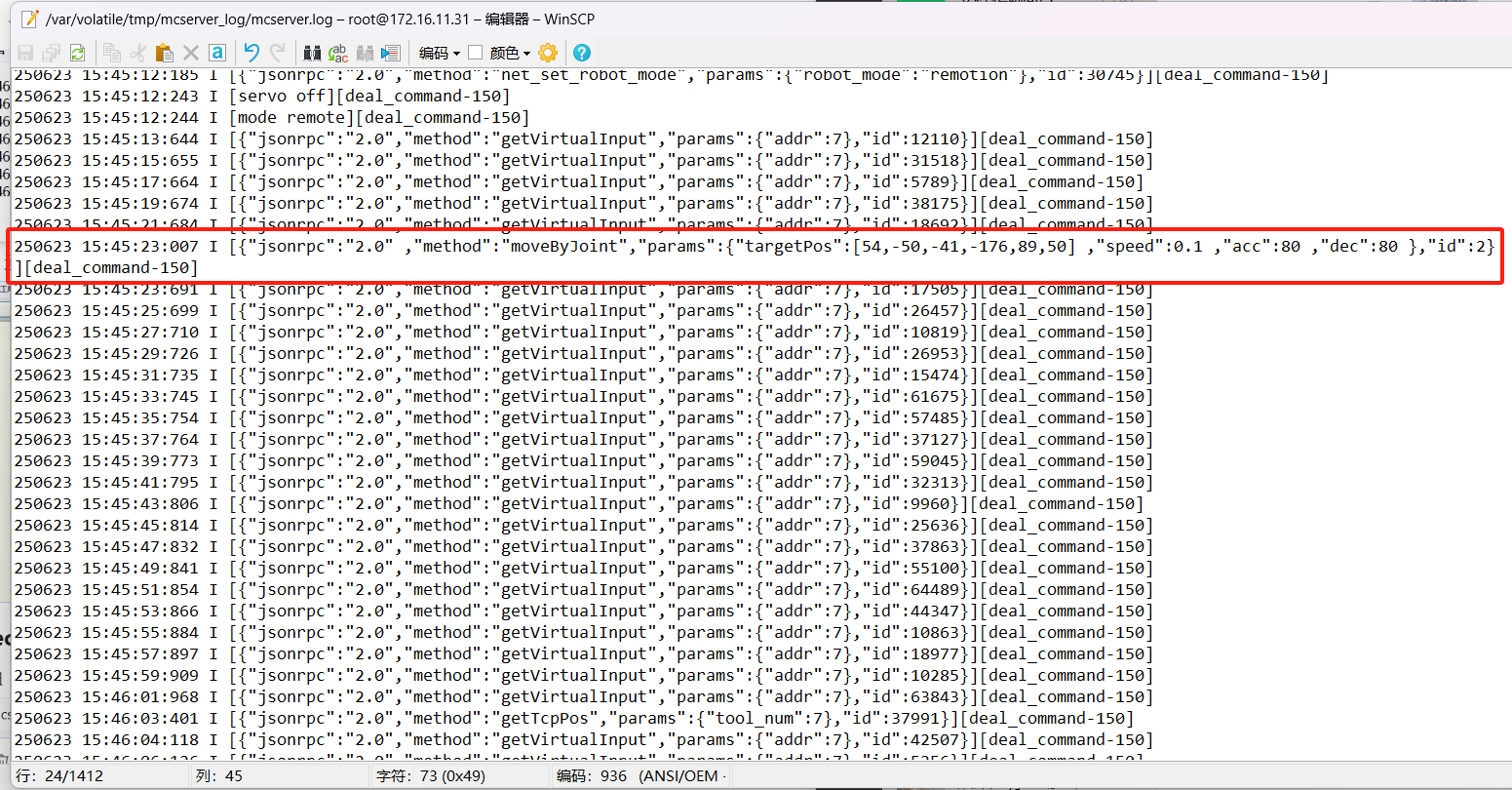
2、meserver.log
mcserver.log 是上位机运行日志,供设计人员排查错误。
路径/tmp/mcserver_log/mcserver.log
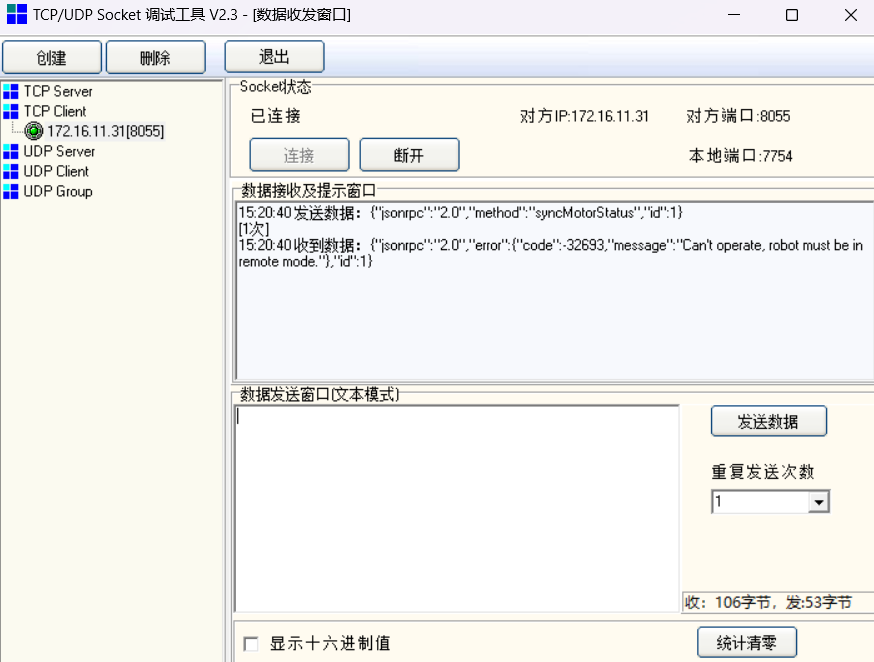
例如如下:运行的jbi(主程序,如果进入的是main,实际通过子任务进入了其他程序,在这里任然显示main)、网络初始化、关节版本号、动力学初始化失败、服务器启动等8055下发的指令。
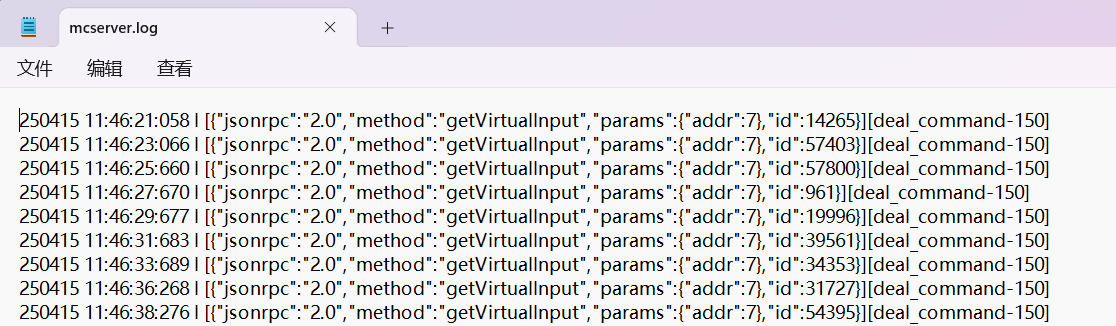
测试方法:通过8055发送一条指令,可在日志中看到执行的时间。
上位机日志特点:
1、 日志断电不保存。
2、 网页版示教器上的操作也能在日志中被记录。
3、 该日志通过缓存刷新,如果上位机发送指令太少则不会在日志中记录,缓存到一定数量才会加载到日志中。(可通过登录网页版示教器增加缓存量,网页版示教器每 2秒自动缓存一条日志;也可上位机多发一些指令增加缓存量)
4、 日志只记录机器人能识别的报文信息。
5、 日志时间遵循机器人示教器上的时间。
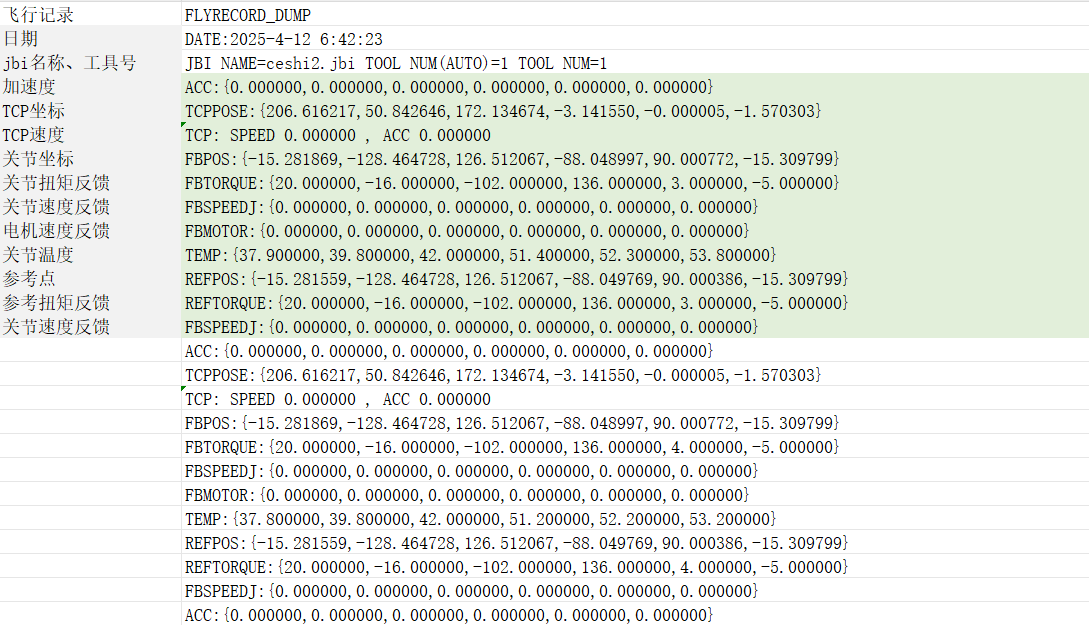
3、 flyrecord.txt
Flyrecord 文件夹里记录每一毫秒的运动过程的数据;机器人运行的点位,速度,温度,关节力矩等。
4、 Runlog
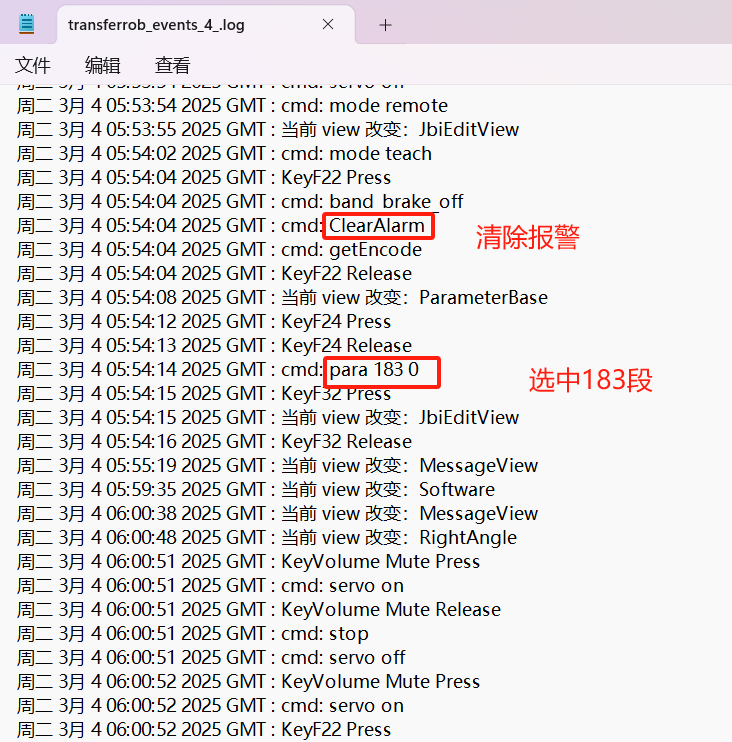
transferrob_events
1、 示校器程序运行过程的后台数据;包括在示教器上按了哪个按键,光标选中了哪一段程序。
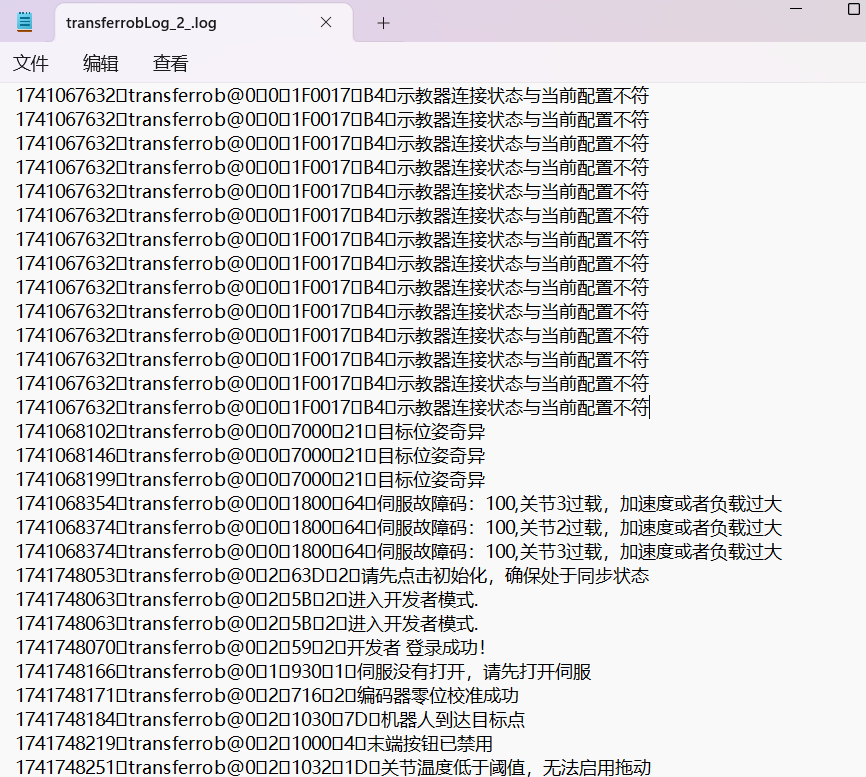
transferrobLog
1、示教器在日志栏发生的所有报警
3. 问题
1、 日志拷贝出来没经过编译,看不懂?
在拷贝日志的时候,如果弹出窗口选项【是否备份格式化文件】选择是。则备份出的日志是经过一定编译的,便于解读日志。
2、 拷贝出的日志只有mcserver-all,没有flyrecord文件和runlog文件?
机器人运行日志备份 V3.10.2 系统版本之后才会有。
3、 机器人版本过于老,日志还是看不懂?
极少情况机器人版本为2.6至2.9的,则伺服报警代码较特殊;故障判断也比较困难,最好还是请教售后协同排查。


























