
















EC非正交用户坐标系
1. 简介
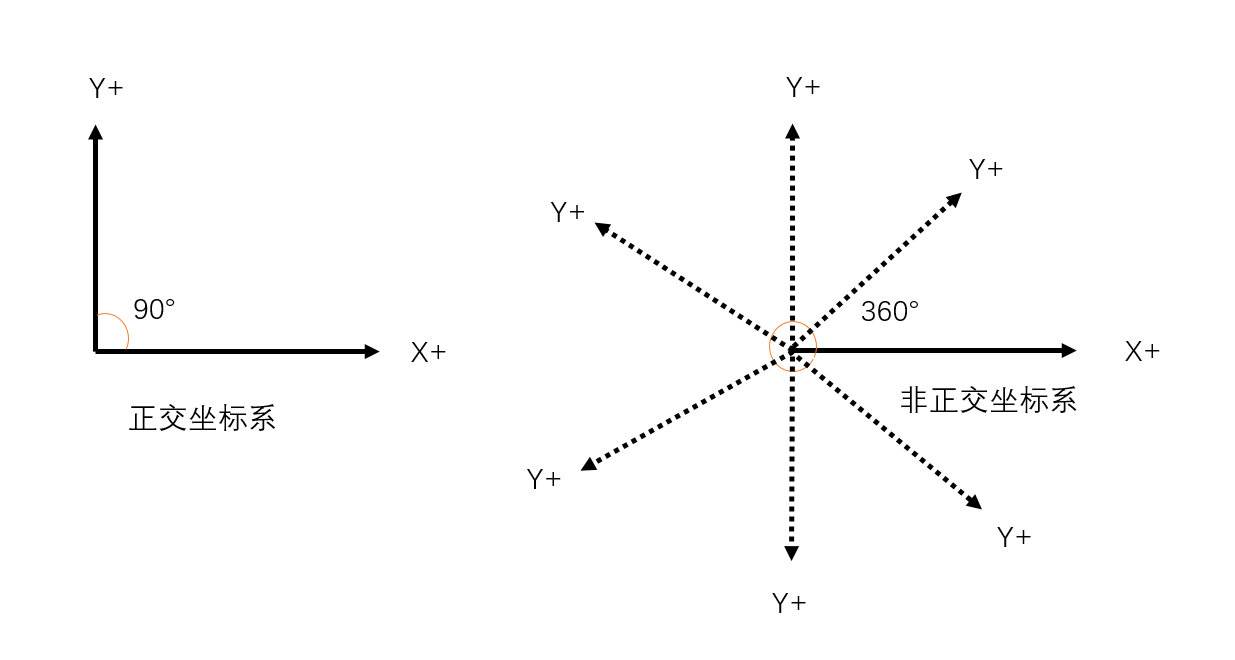
在机器人应用领域,坐标系是定义机器人运动和操作的基础框架。传统的笛卡尔坐标系是正交的,即坐标轴相互垂直,非正交坐标系是指坐标系的坐标轴之间的夹角不全为 90 度的坐标系。在机器人领域,它为机器人的运动控制和任务执行提供了一种不同于传统正交坐标系的参考框架。(非正交用户坐标下需机器人软件版本在3.16.0及以上)
2. 如何建立坐标系
2.1 非正交坐标系建立
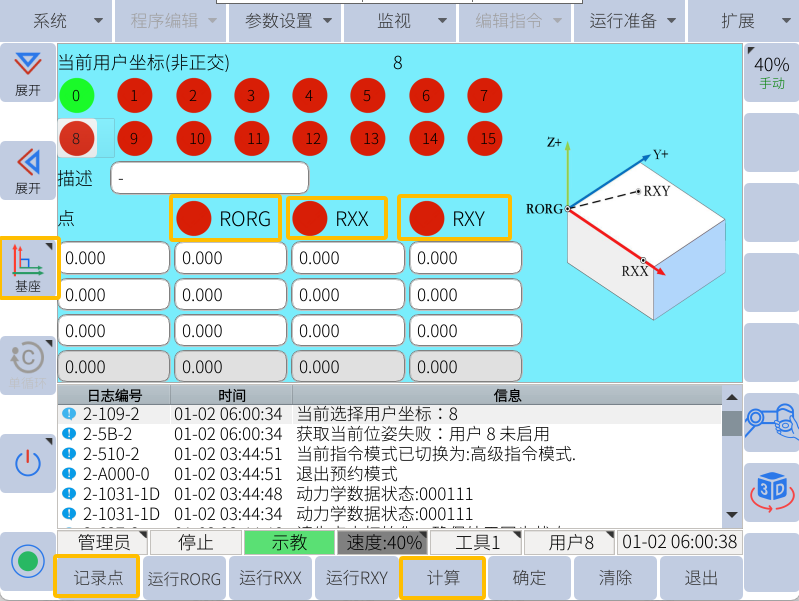
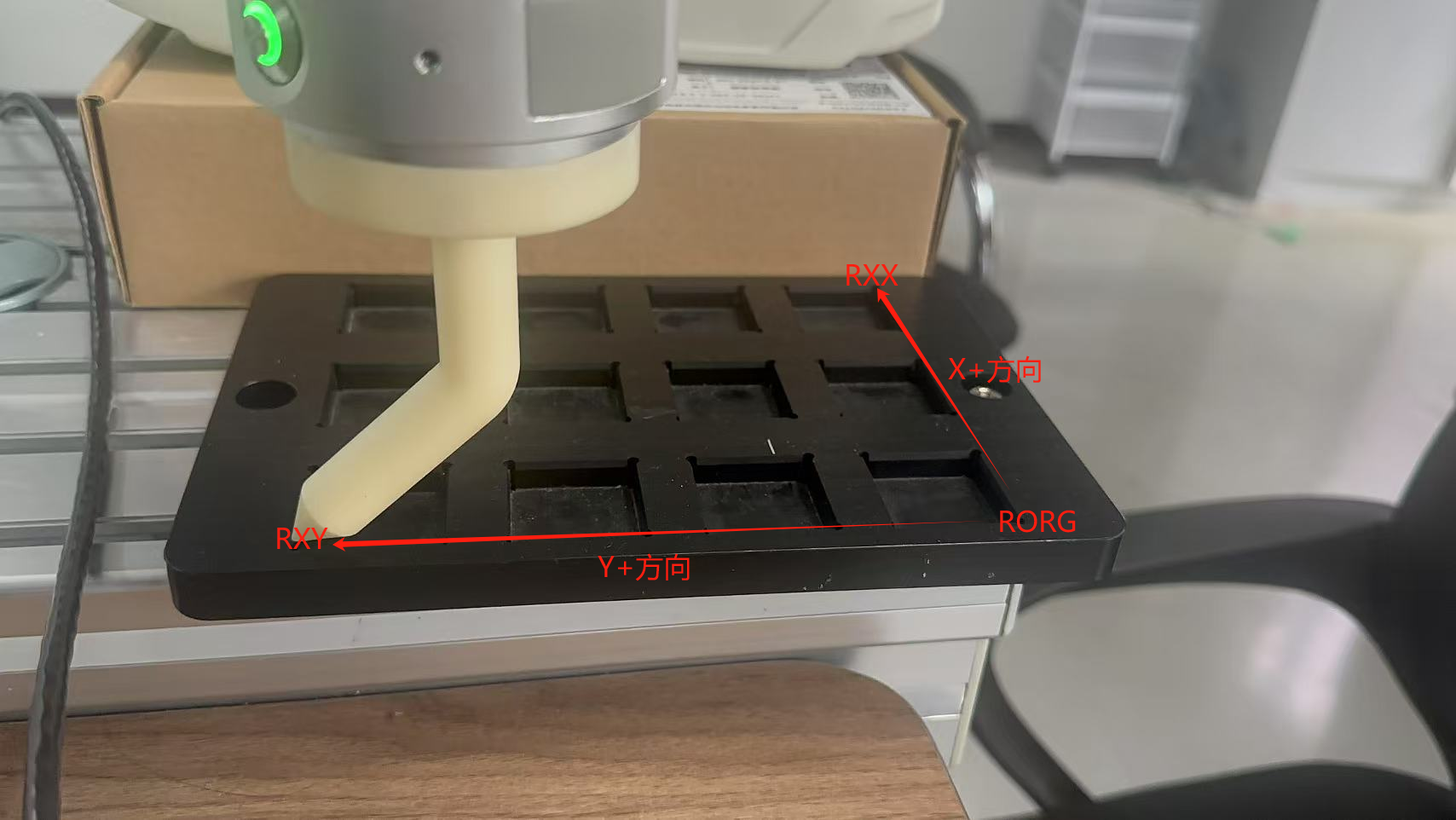
2. 2 选择8号坐标系>>示教三个点,RORG对应X和Y方向原点,RXX对应X+方向,RXY对应Y+方向,非正交的RXY需要基于原点精准示教出来,Z+方向是计算出来。注意:X+和Y+方向不能在同一直线内。建议机器人末端安装尖点,坐标系精度更高,如下图中三个点示教位置:


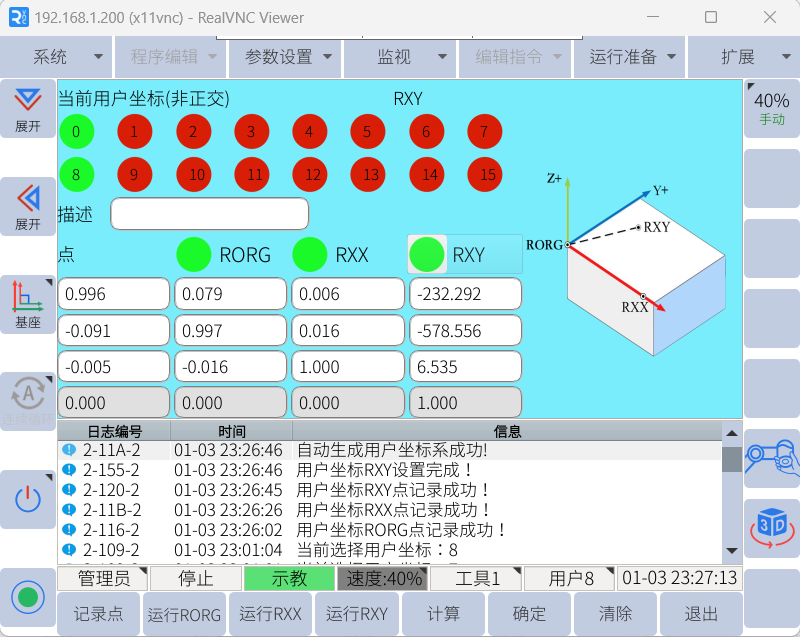
2.3. 可以通过切换坐标系,如上图基座切换到用户,通过手动示教移动XY方向确认用户坐标方向。
2.2正交坐标系建立
1. 正交坐标系建立需要使用0-7号坐标系
2. 例如选择0号坐标系>>示教三个点,RORG对应X和Y方向原点,RXX对应X+方向,RXY对应Y+区域,正交坐标系的RXY是不需要基于原点在Y+方向精准示教,只需要在Y+区域内任意点即可,机器人通过X+方向轴根据90°夹爪算出Y+和Z+方向。
3. 正交与非正交坐标系的区别及使用场景
区别:坐标轴夹角
● 正交坐标系:坐标轴之间的X,Y夹角为 90 度,如机器人的基座坐标系,x 轴和 y 轴相互垂直。这种垂直关系使得在该坐标系下的几何图形和向量运算等具有较为简单和直观的性质。
● 非正交坐标系:坐标轴之间的X,Y夹角不是 90 度,可能是任意角度。
使用场景:
● 在使用正交坐标系建立后发现X或者Y方向存在偏移,可能是X,Y的夹角不是90°,可使用非正交坐标系单独建立X和Y方向。
● 在有些码垛的场景,X和Y可能需要45°夹角去偏移,可使用非正交坐标系。


























