
















EC机器人新机快速使用
1. 简介
本章重点介绍机器人使用的快速入门,它不是一个全面的使用指南,有关设置和编程的更多信息,请参阅相关手册。
2. 操作流程
2.1 机器人系统介绍
1. 机器人系统主要由机器人本体(以下简称为:本体),机器人控制柜(以下简称为:控制柜)和机器人示教器(以下简称为:示教器)组成。
2. 本体主要由关节和连杆组件构成,用户可以使用示教器来控制关节的移动。
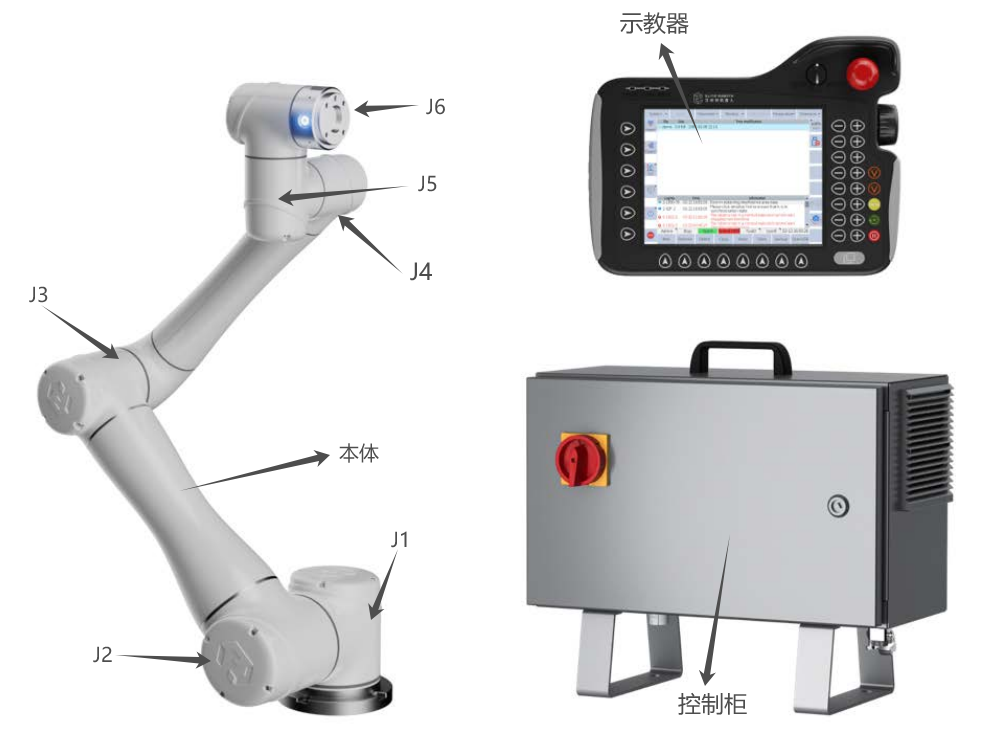
3. 控制柜为机器人系统的控制部分,可控制机器人在工作空间中的运动位置、速度、加速度、姿态和轨迹,以及连接设备的电气输入输出端。
4. 示教器是机器人系统中的显示和操作部分,用户可通过示教器操作机器人本体并对机器人进行编程。
2.2 硬件安装及开机
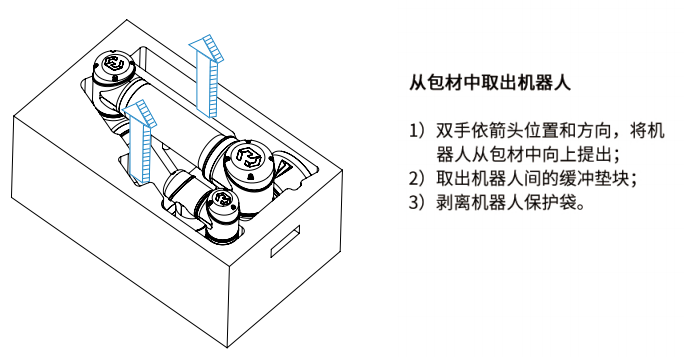
1. 装箱清单。
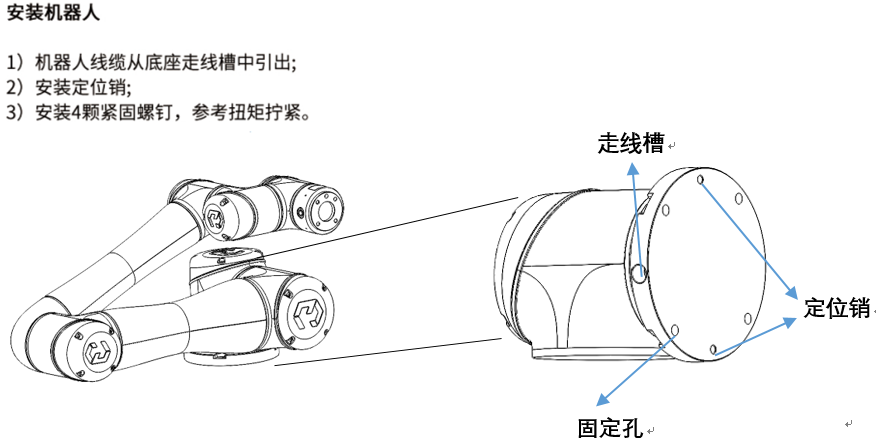
2. 安装机器人本体。
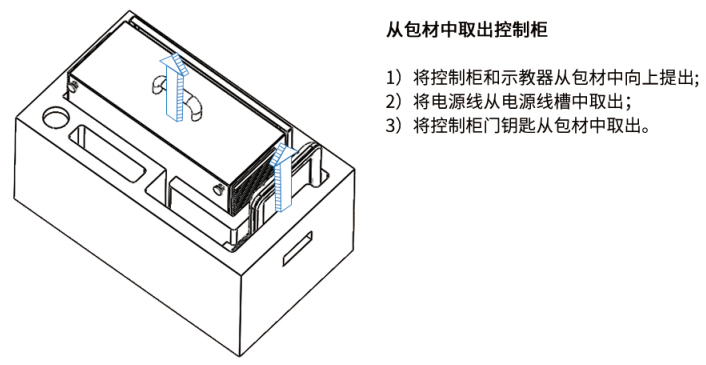
3. 安装机器人控制柜、示教器和连接线缆。
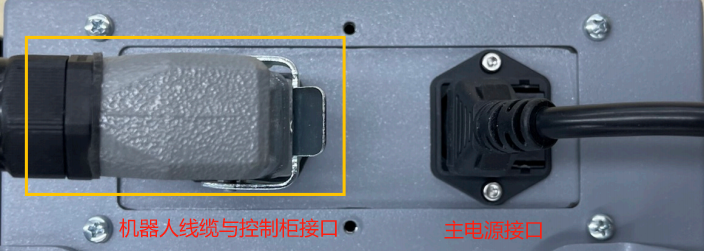
4. 控制箱的主电源线末端插入控制箱电源端口,并将另一端插入AC220V插座;机器人线缆末端有一个重载方形插头,将重载方形插头插入控制箱。注意插入方向,插紧后要锁上连接器。
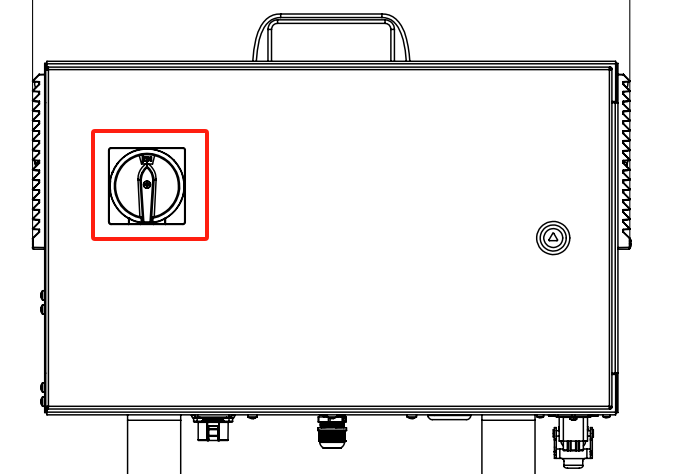
5. 线束连接完成后旋转电控柜上的开机按钮置ON。
2.3 机器人初始化
功能:清除报警初始化并同步、编码器校验,使机器人能正常准确运行。
步骤:1. 开机后,点击示教器屏幕左下角红色按钮以清除报警初始化。
2. 变黄后,打开伺服再次点击该按钮进行编码器校验,直到按钮变绿。 备注:旧版本中报警与同步按钮未合并,需点击左下角红色按钮清除报警、然后点击上方的 同步按钮进行同步。
2.4 机器人运行前准备
● 安装参数确认
功能:确认必要的参数,以免发生意外情况。
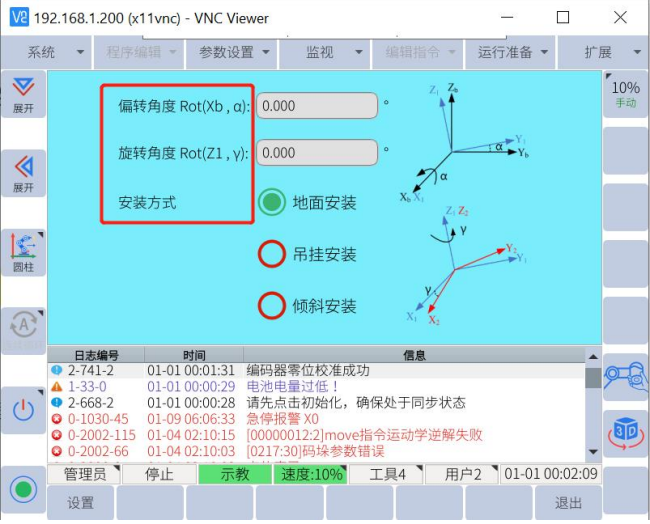
步骤: 点击“运行准备”>“安装设置”,选择安装方式,若机器人实际为水平安装,则如图选择 地面安装,角度俱为 0。若为其他安装方式,如侧装倒装,可参考: 相关文档进行设置https://bbs.elibot.cn/forum/detail/topic/142.html
● 工具负载设置
功能:由于每个工具重心质量不同,需要设置合理的负载数值,使机器人能正常工作
步骤: 在机器人末端安装工具后,打开“运行准备”>“工具负载设置”,选择工具号 (可选 0>7),填写下图圈出的部分 x, y, z(未安装末端治具时可不用设置)。
2.4 手动移动
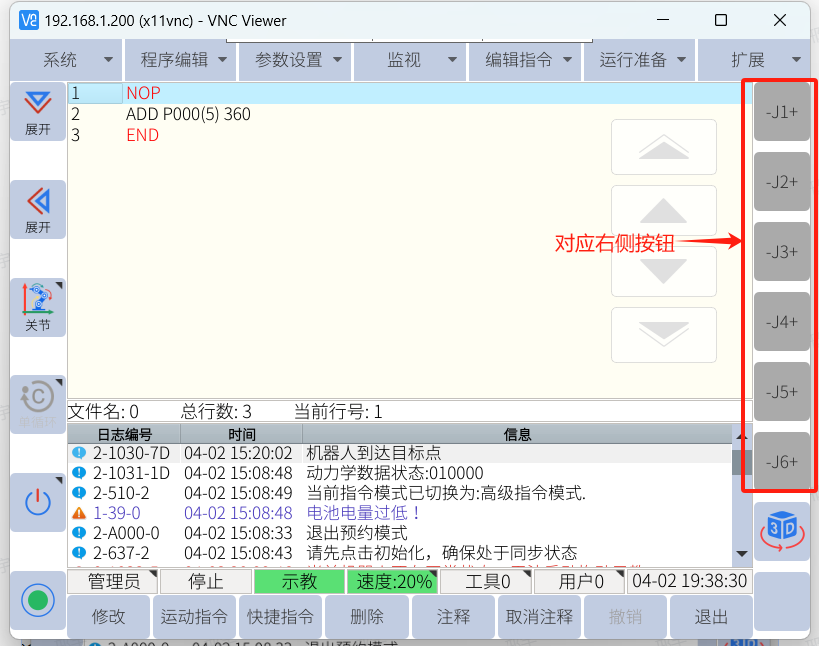
机器人系统启动后,机器人可以通过多种方式移动。以下为如何使用示教器控制单关节轴运动:
1. 点击示教器屏幕左侧菜单栏中的坐标并选中关节按钮
2. 远离机器人
3. 按住示教器背面的三位使能开关,伺服指示灯亮
4. 按下所需轴运动按钮的 +/- 按钮
用户还可以使用拖动功能移动机器人,要激活机器人的拖动示教功能,请找到位于工具法兰一侧的蓝色按钮。

用户须按住蓝色按钮,同时将机器人拖动到所需位置,松开拖动示教启用按钮,即可退出拖动示教模式。
2.5 机器人程序
2.5.1 新建程序
创建一个程序,点击“新建”,会弹出一个界面,如图 4-5 所示。

点击“文件”后,输入需要的文件名(英文或数字),点击“确定”即可创建一个新的程序文件
2.5.2 插入指令
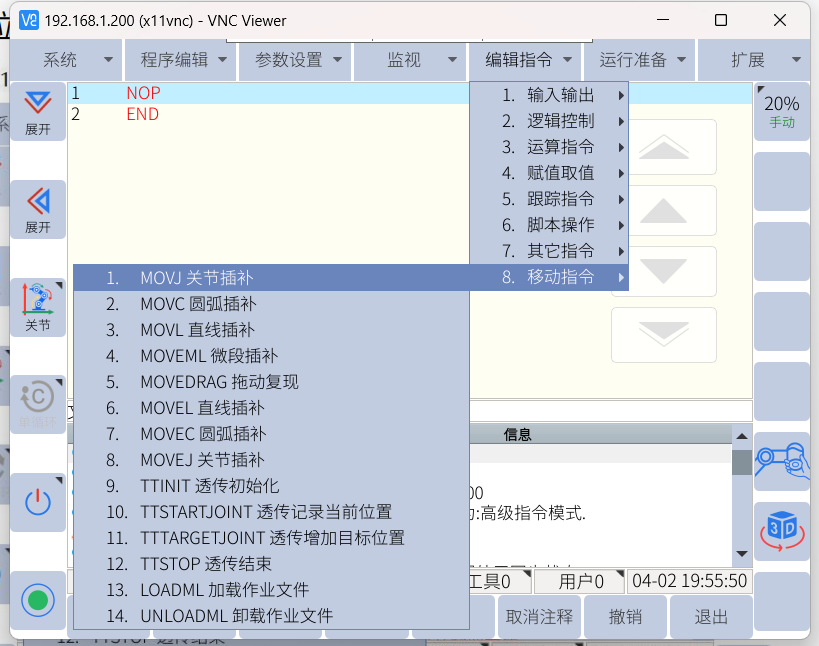
要插入指令,请找到主菜单栏并单击“编辑指令”选项卡。以下指令类别可用:
1. 输入输出
2. 逻辑控制
3. 运算指令
4. 赋值取值
5. 码垛指令
6. 脚本操作
7. 其它指令
8. 移动指令
除移动指令外,所有指令的插入方法均相同。
1. 在程序编辑页面,将光标移动到要插入指令位置的前一行。
2. 然后按主菜单下的“编辑指令”或子菜单区域的“快捷指令”选择要插入的指令,如 图4-6 所示。

3. 编辑完参数后,按“确定”插入指令。子菜单区域的“快捷指令”选项卡仅包含部分指令,但通过按主菜单栏中的“编辑指令” 可以找到所有指令。
2.5.3 插入移动指令
在不使用 P /V变量的情况下插入移动指令时,机器人的当前位置将被记录到移动指令中。请务必按下三位使能开关,机器人上使能后才能成功插入移动指令。
插入移动命令的详细步骤如下:
1. 使用拖动示教或单关节轴运动按钮将机器人移动到所需位置;
2. 将程序光标移动到要插入移动指令的位置之前的行;
3. 按住三位使能开关 - “SERVO”指示灯将亮起;
4. 单击子菜单栏中的“运动指令”或选择 编辑指令 -> 移动指令,然后在下拉菜单中 选择所需的移动方法;
5. 选择移动指令后,编辑参数,按“确认”插入。
2.5 运行程序
切换到自动(PLAY)模式,选择循环模式,按下伺服按钮之后,点击启动:
1. 单步:每按一次运行按钮仅执行一行指令,不执行非运动指令。
2. 单循环:执行一次程序。
3. 连续循环: 连续重复一个程序。

2.6 关机
当用户准备关闭系统电源时,首先将示教器上的模式开关从 PLAY 或 REMOTE 转到 TEACH 以结束当前程序。


3. 常见问题解答
1. 插入移动指令时必须按住三位开关。否则,移动指令将不会被插入。
2. 程序在编辑时自动保存。
3. 如果没有保存工具信息或设置了错误的负载,机器人重力补偿将无法正常工作。
4. 如果没有使用正确的安装方式,拖动示教功能将无法正常工作,机器人可能会向无法预测的方向运动。


























