
















CS取消关节自动标定
2025-07-21
1. 简介
使用SDK控制机器人时,在一些异常情况下,机器人断电停止,重新上电后,机器人的自动标定可能导致夹持的物料与机构发生碰撞;故可取消关节的自动标定,发送有效的指定路径运动来代替标定且能有效的避免碰撞干涉的出现。
2. 操作流程
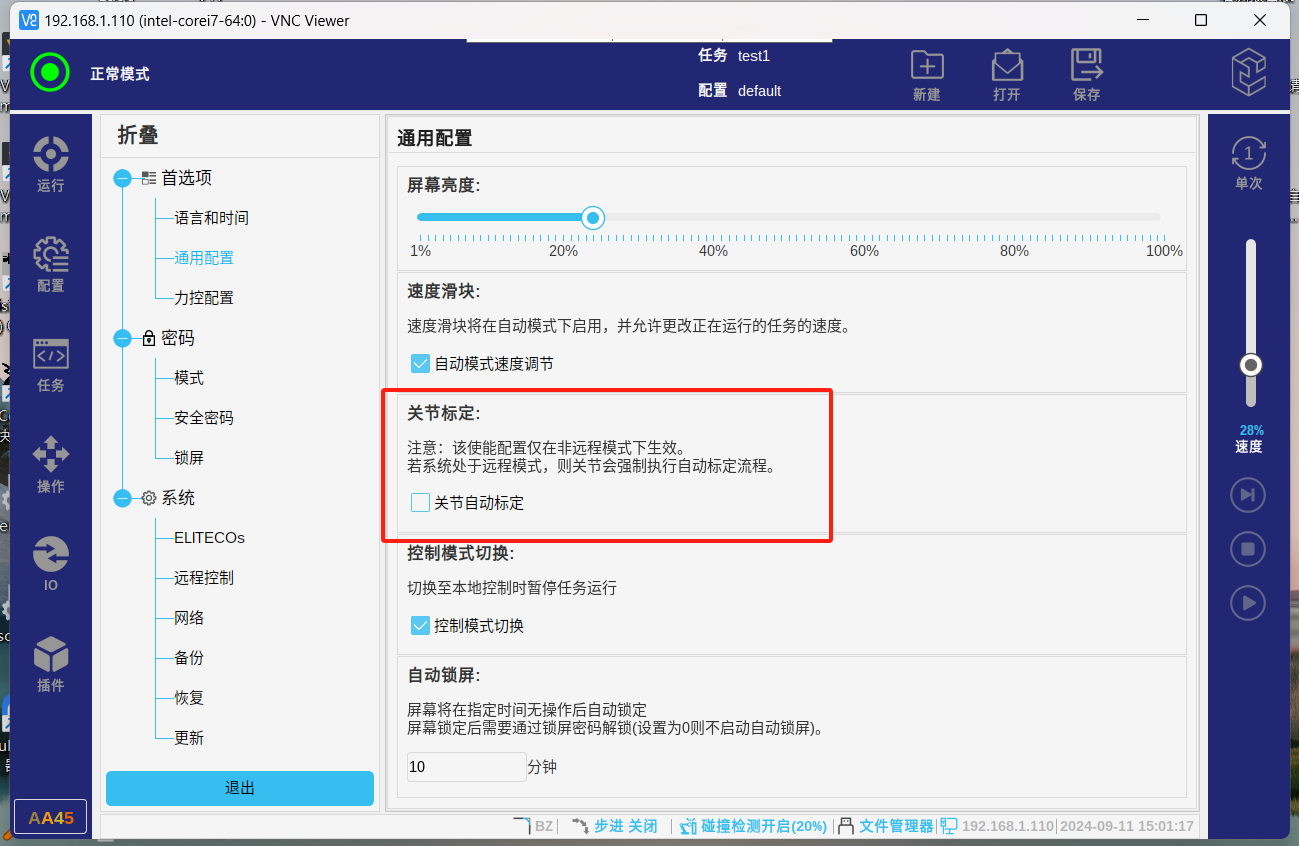
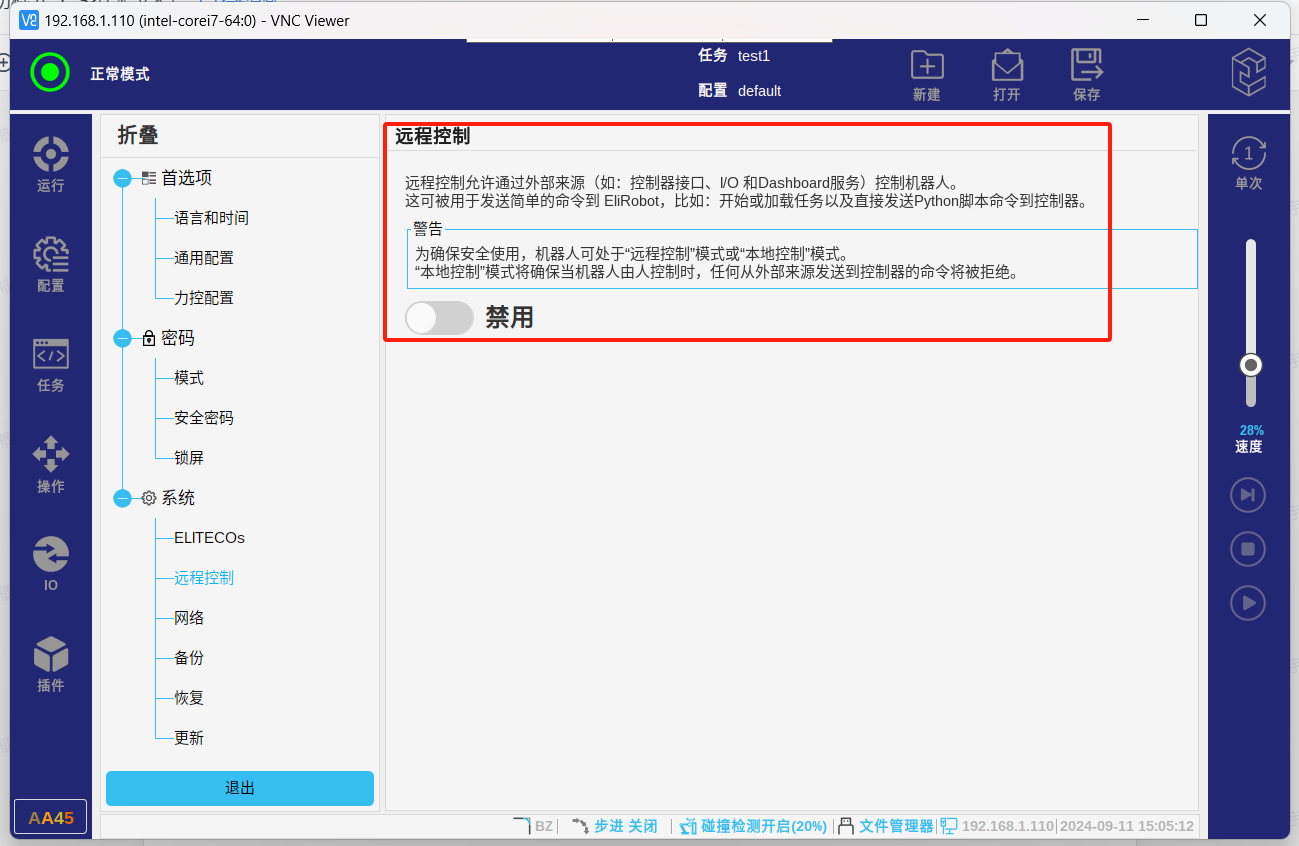
2.1 参数配置
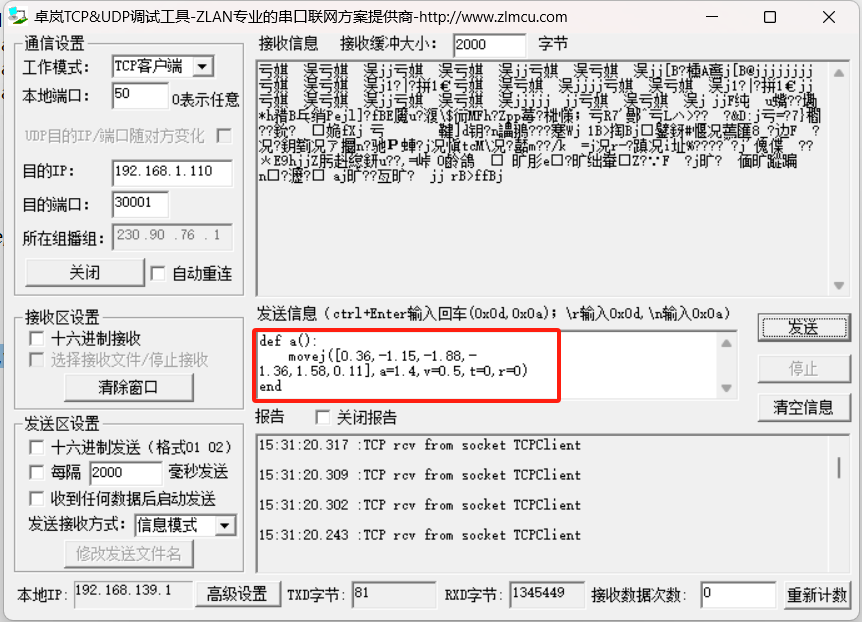
2.2 实际使用



3. 常见问题解答
如需在本地模式下进行手动标定,即可在弹出自动标定页面后,点击自动标定按钮进行标定,各轴会小范围自动移动,完成后各轴为黄色状态退出即可。



























