
















CS机器人码垛工艺包搭配视觉偏移使用方法
1.简介
在机器人应用场景中有很多场景都是带有视觉偏移,在码垛和拆垛的场景中也少不了视觉引导定位,使用码垛工艺包时搭配视觉引导定位的方法就与其他的视觉引导定位方法有所不同。一般视觉引导点位是直接在目标点上进行偏移即可,但是使用码垛工艺包时不能直接在目标点上进行偏移,这就需要通过其他方法进行偏移。
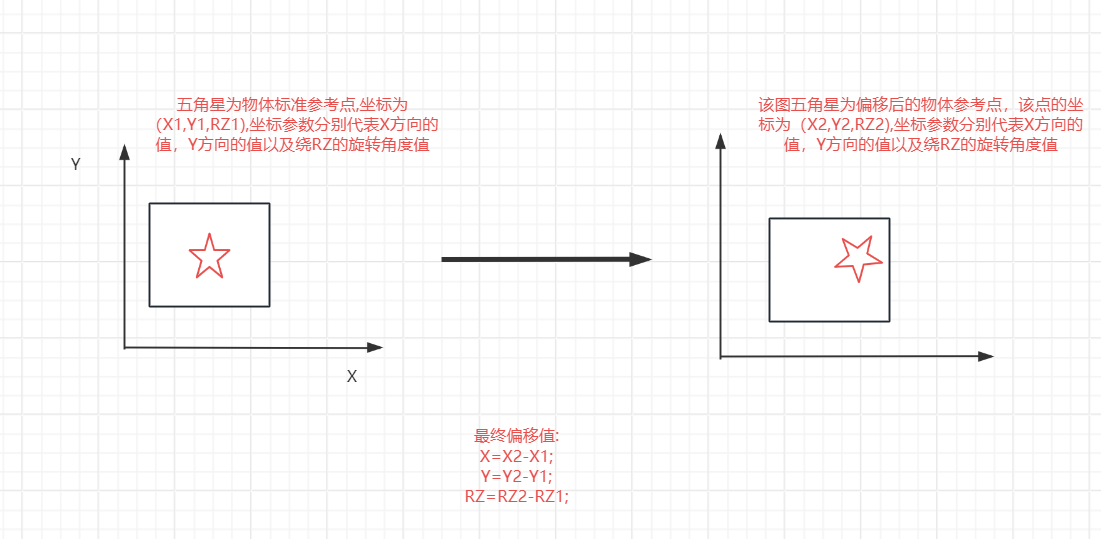
该图为偏移讲解图
码垛路点解释:
- 'ApproachPoint'接近点:无碰撞接近参照点;
- 'ToolActionPoint'工具动作点:默认为参照点,可根据实际需要修改;
- 工具动作:“工具动作”节点下,添加相应的工具动作;
- 'ExitPoint'离开点:无碰撞离开参照点。
2.操作流程
2.1方法一-偏移用户坐标系达到偏移效果
2.1.1建立用户坐标系
第一步:在料盘上找到3个点,分别是原点,X正方向的点以及XY平面正方向的点。
第二步:进入机器人配置→坐标系→添加新的用户坐标系(新坐标系命名需要是英文)→示教坐标系。(具体操作步骤请看图-1红色数字标记处)

图-1
2.1.2使用用户坐标系偏移
第一步:在机器人主任务里插入一个码垛指令,坐标系选择新建的用户坐标系(如图-2红框标记处)。
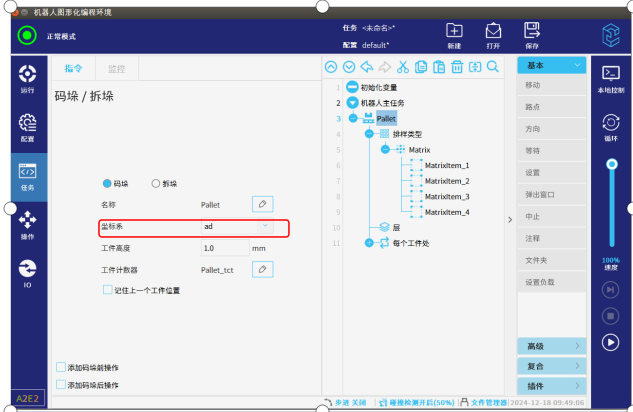
图-2
第二步:使用pose_trans函数将坐标系ad按照得到的偏移值进行偏移(如图-3红框标记处),这样码垛工艺包里的码垛点也会随着坐标系ad的偏移而偏移。
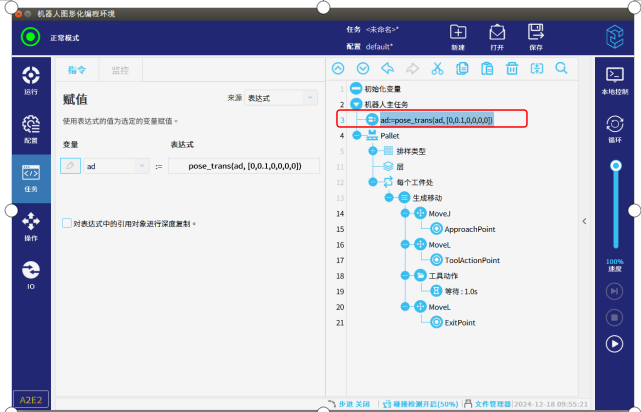
图-3
2.2方法二-直接偏移目标点位
2.2.1将码垛工艺包里3个运动点位都按照外部偏移值偏移(进入点,工具动作点,离开点)
第一步:在机器人主任务里插入一个码垛指令,然后按照码垛指令的使用方法将其各项参数设置好。
第二步:编写一个偏移脚本,具体脚本内容如图-4红框标记所示。
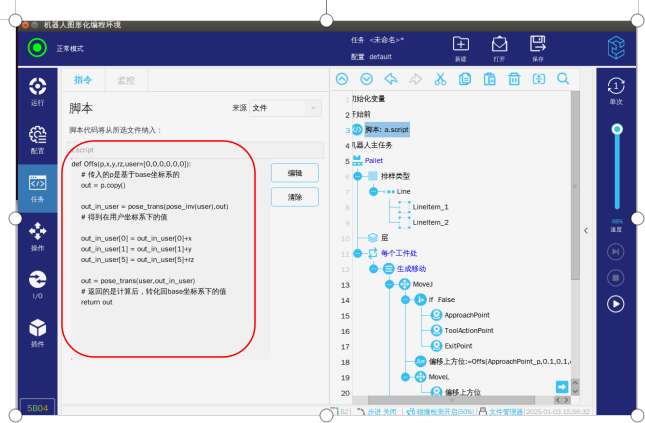
图-4
第三步:在码垛程序里按照图-5红框标记所示写好偏移程序,要重新插入一个movel运 动指令,然后将偏移点位放在新插入的运动movel指令下(如图-7红框标记所示),如果直接将偏移点位放在码垛指令自动生成的运动指令下就会出现机器人非正常运动。
注意:因为码垛指令会临时生成了个用户坐标系,需要偏移的话要把这个点位转换成基座标下加上补偿值后再转换成临时生成用户坐标系下的值去运动,所以在码垛指令下的运动指令要选择的是临时生成的用户坐标系(图-5绿框标记处)。
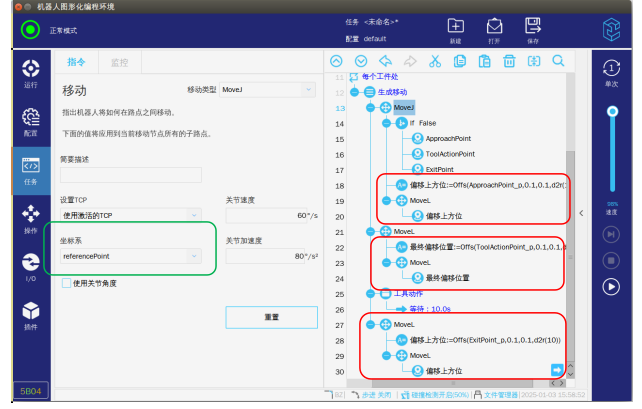
图-5
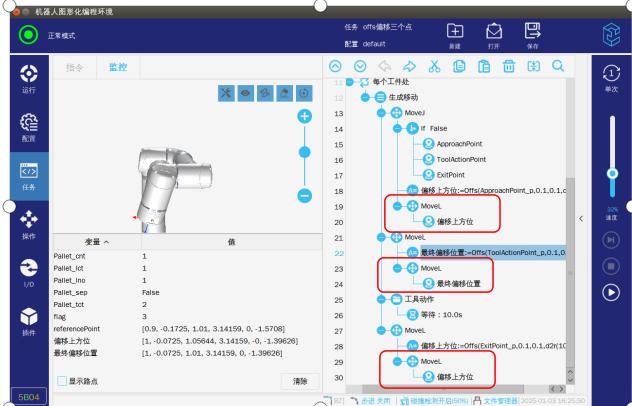
图-6
2.2.2只按照外部偏移值偏移最终目标点
第一步:在机器人主任务里插入一个码垛指令,然后按照码垛指令的使用方法将其各项参数设置好。
第二步:编写一个偏移脚本,具体脚本内容如图-7红框标记所示。
图-7
第三步:在码垛指令里编写好最终偏移点和偏移上方点的偏移程序(如图-8红框标记所示),要重新插入一个movel运动指令,然后将偏移点位放在新插入的运动movel指令下(如图-9红框标记所示),如果直接将偏移点位放在码垛指令自动生成的运动指令下就会出现机器人非正常运动。
注意:因为码垛指令会临时生成了个用户坐标系,需要偏移的话要把这个点位转换成基座标下加上补偿值后再转换成临时生成用户坐标系下的值去运动,所以在码垛指令下的运动指令要选择的是临时生成的用户坐标系(图-8绿框标记处)。
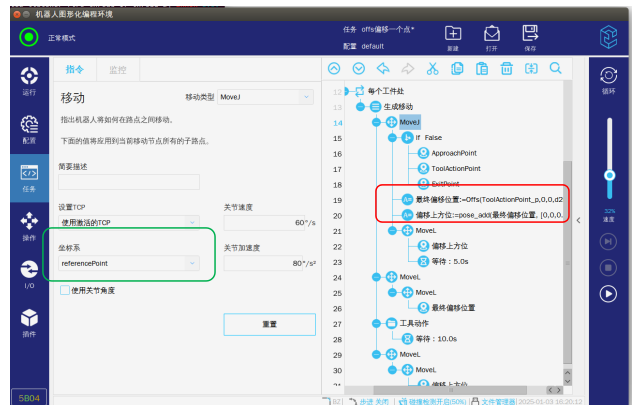
图-8
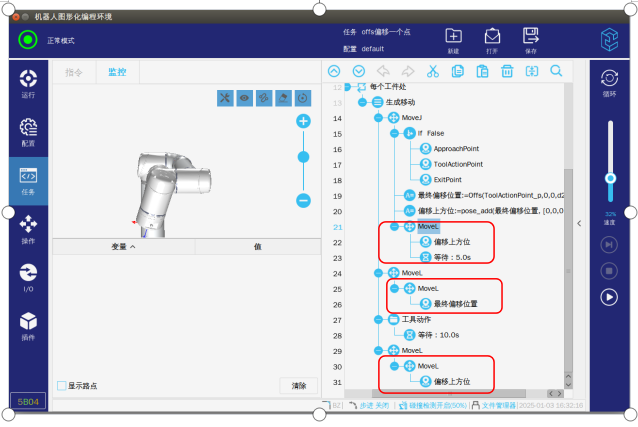
图-9
3.常见问题解答
- 使用坐标系偏移方式偏移时,一定要注意把坐标系改成新建的用户坐标系。
- 新建的用户坐标系要使用英文命名。
- 使用2.2(方法2)进行偏移时要重新插入一个movel运动指令,然后将偏移点位放在新插入的运动movel指令下(如图-6和图-9红框标记所示)。
- 使用2.2(方法2)进行偏移时因为码垛指令会临时生成了个用户坐标系,需要偏移的话要把这个点位转换成基座标下加上补偿值后再转换成临时生成用户坐标系下的值去运动,所以在码垛指令下的运动指令要选择的是临时生成的用户坐标系(图-5和图-8绿框标记处)。


























