
















CS机器人生成ml文件以及微段插补的使用
1.简介
本文将介绍如何使用脚本获取当前位置生成ml文件,使用插件进行微段插补运动。主要运用于对轨迹要求顺滑的场景,例如涂胶。
2.操作流程
1.导入脚本
下载下方链接的脚本文件,使用U盘导入机器人。
getpoes.script
2.机器人程序
1.在 配置-全局变量 里声明一个名为 flag 的变量。
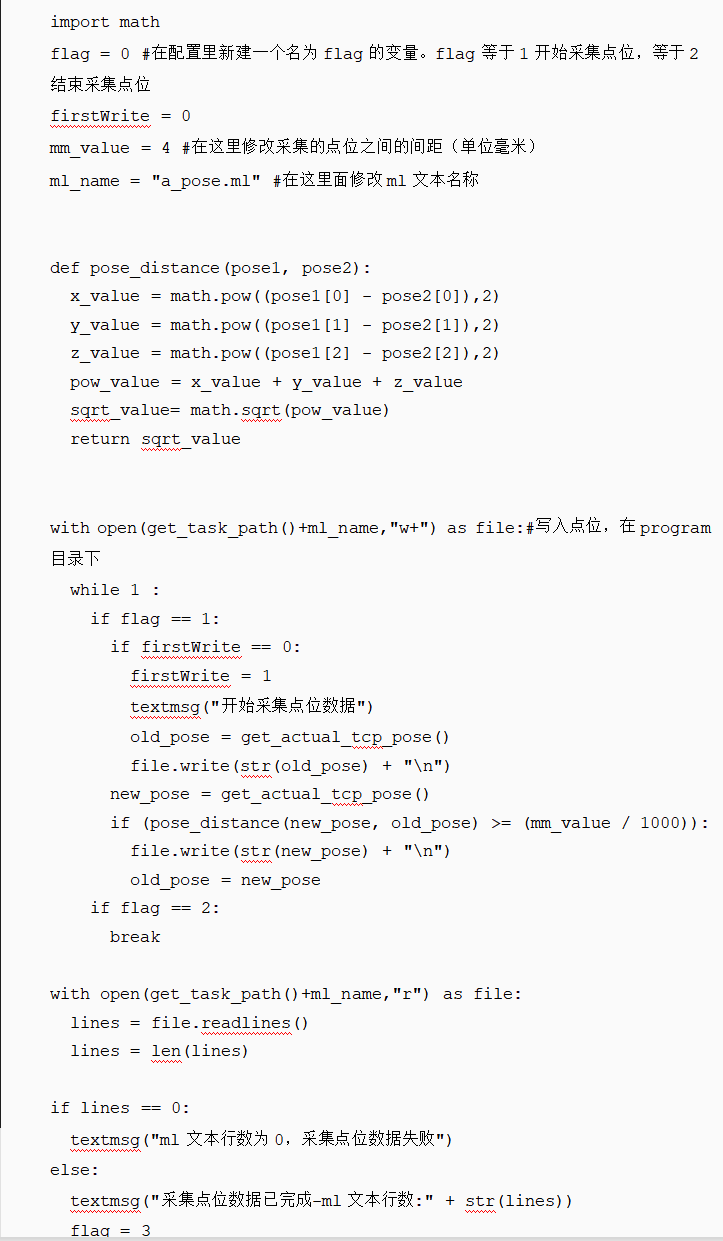
2.按图中的方式,在现有的程序里添加程序行。flag = 1 ; flag = 2 ; 等待 flag ?= 3 ,添加线程将getpoes脚本放到线程节点下。
flag = 1 是开始记录点位,flag = 2 是结束记录点位,flag ?= 3 是等脚本运行完成。

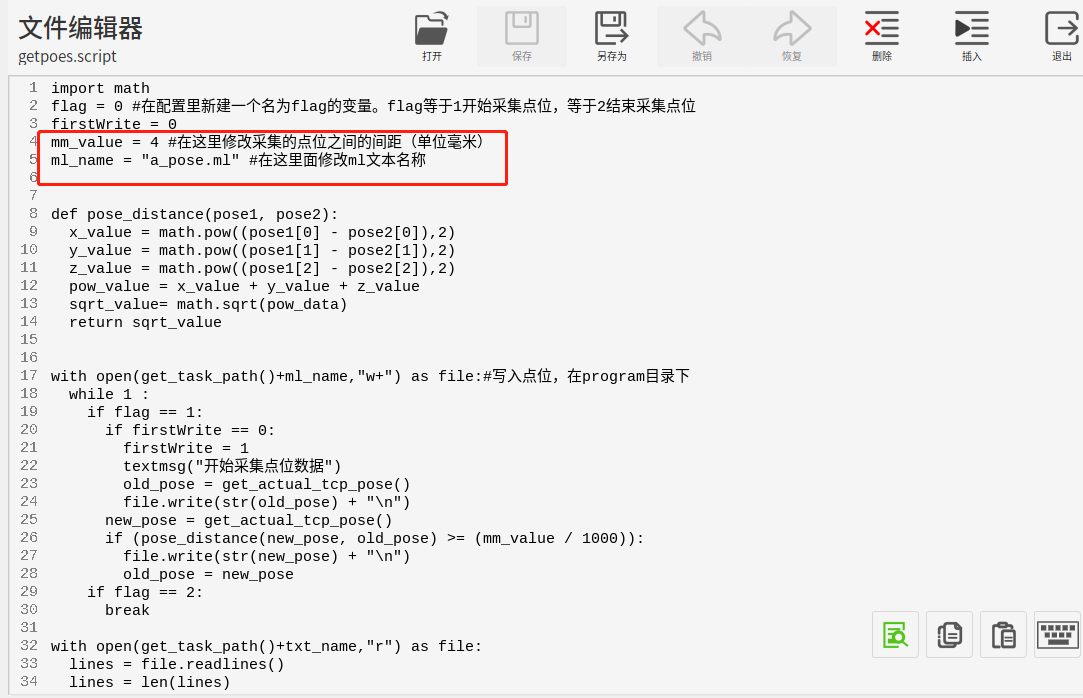
3.脚本说明:可在红框处修改采集的点位间距和ml文件的名称。
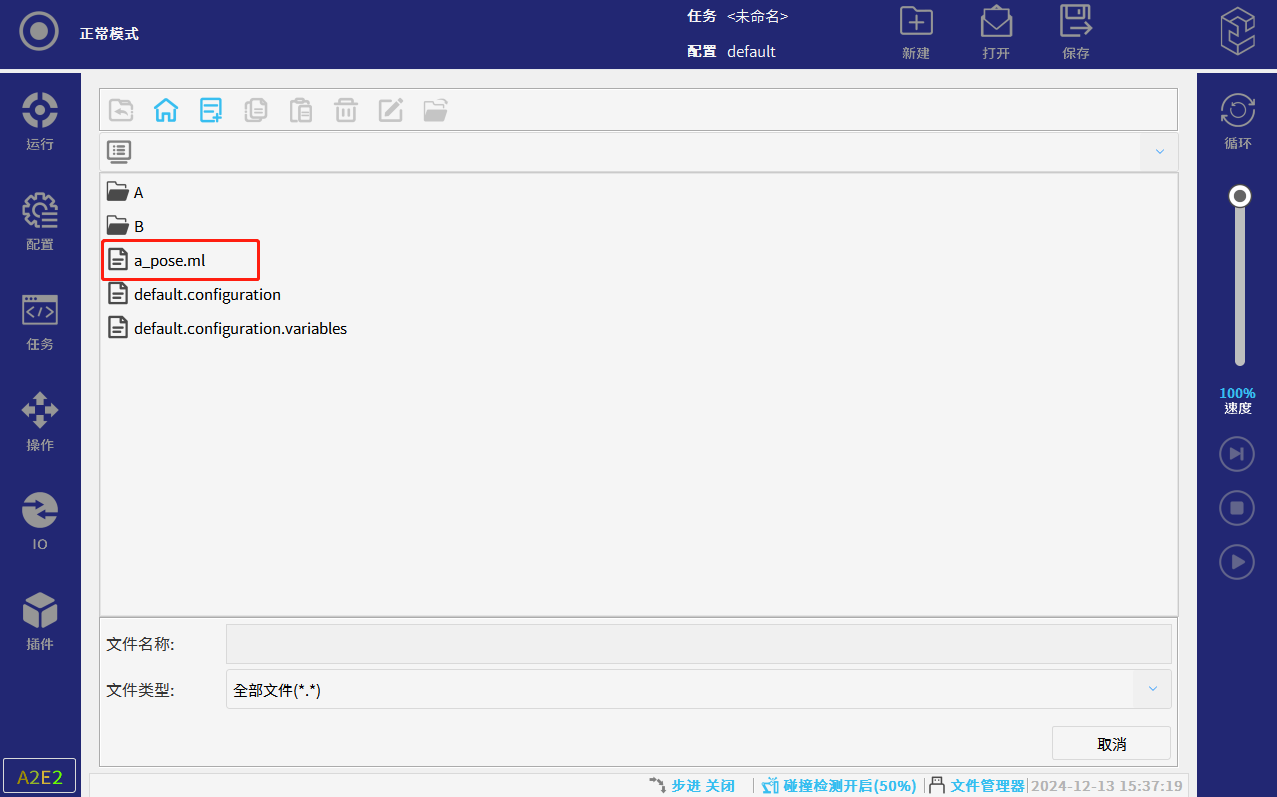
4.执行机器人程序,机器人的运行速度百分比可以调到20%以下。执行完成后,会在在如图片所示的目录下生成一个.ml后缀的文件。
5.注意,如果需要生成多个ml文件,就需要在脚本文件里修改ml文件的名称。不修改的话,会覆盖原有的ml文件。
3.使用插件
1.插件文件:remotetcp-1.2.9.0.elico
2.在红框处,点击选择添加.ml后缀的文件。时间间隔,ml文件中两个点位之间的时间间隔,间隔越短运行速度越快。

4.在机器人程序中使用微段插补
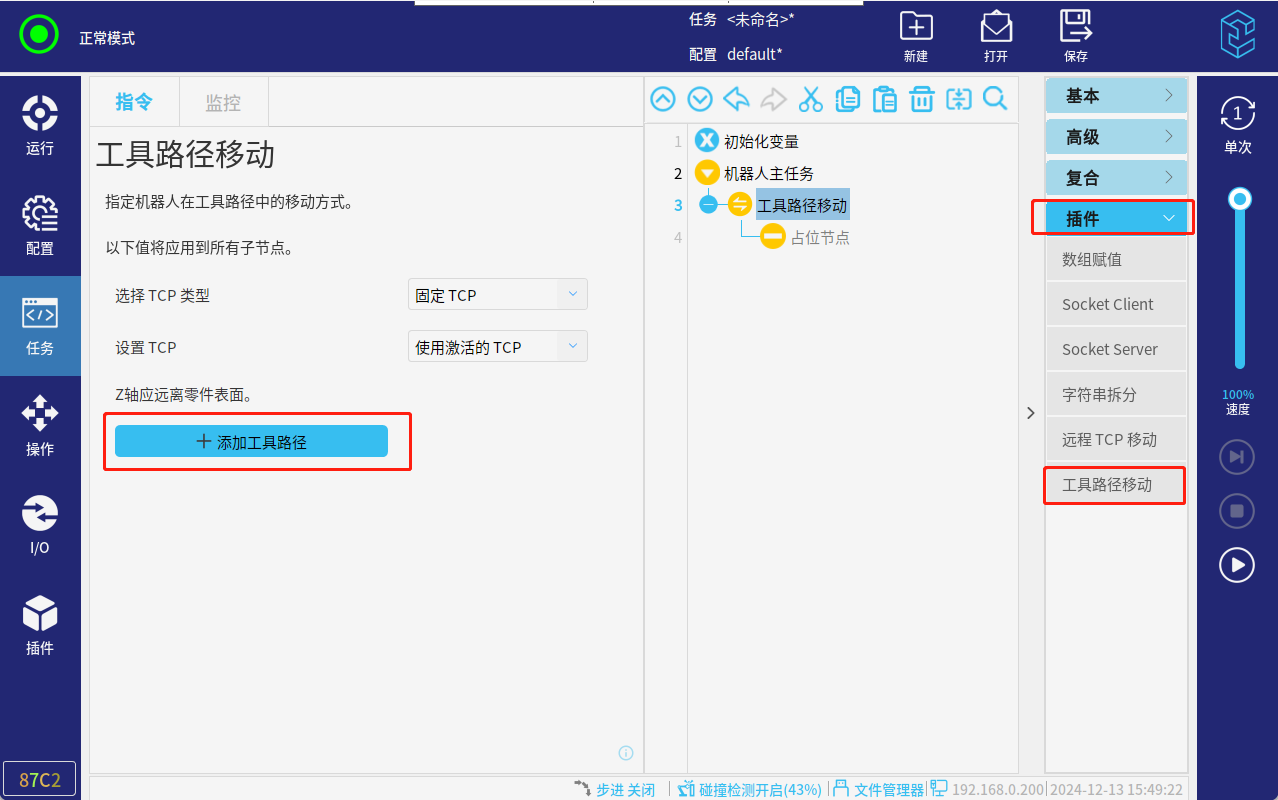
1.在插件目录下,找到工具路径移动,点击添加工具路径
2.在运行离线文件处,可以修改ml文件一共要运行几行,从第几行开始运行。点击添加自动运行脚本移动至起始点位,运行程序时,会运动到ml文件中起始行的位置。

3.以上操作完成后,就可以运行程序了。初次运行,速度百分比调低一点,插件参数设置的不对,运行过程中可能会有抖动。
3.常见问题解答
1.微段插补实际运行过程中有抖动
可以在插件里修改时间间隔,把时间间隔改大一些。ml文件中两点之间,间隔越大运行速度越快。插件中的时间间隔,间隔越大运行速度越慢。


























