
















EC机器人与欧姆龙EthernetIP
1. 简介
本篇文章使用EC机器人与欧姆龙PLC实现EthernetIP通讯 plc 型号:NX1P2-9024D
eds文件请联系Elite官方技术支持或通过链接:下载中心_机器人技术-艾利特机器人
2. 操作流程
1.1 软件需求以及配套文件
所需软件下图,Sysmac Studio 可自行百度下载,Network 为 sysmac 的配套软件无需单独安 装,注意:软件版本最好大于等于plc 版本
Network位置找到C盘下欧姆龙安装目录软件所在位置:Omron\SysmacStudio\StartMenu\Sysmac Studio\Network Configurator for EtherNetIP


1.2 硬件连接
PLC连接 24V 以及 0V,将网线插入 EtherNet/IP 口,另一端连接至机器人控制柜网口或交换机

plc电源接线

机器人控制柜网口
1.3 Sysmac Studio通讯设置
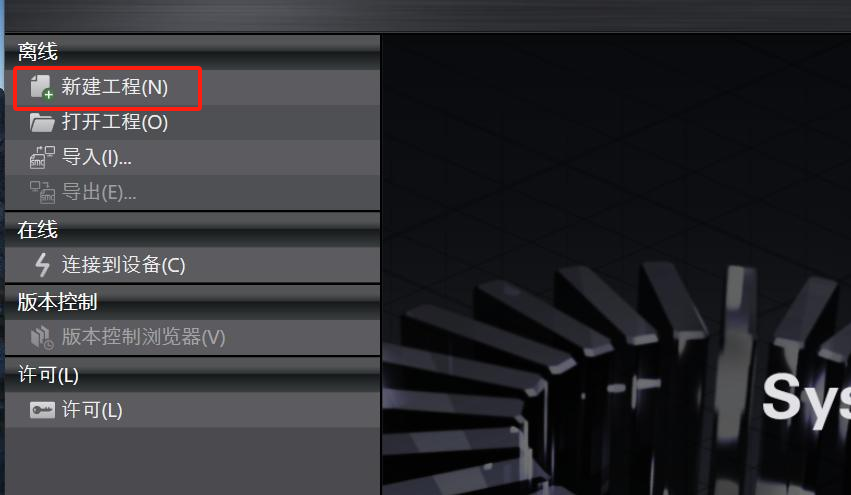
1、下载后安装既可,打开软件新建工程
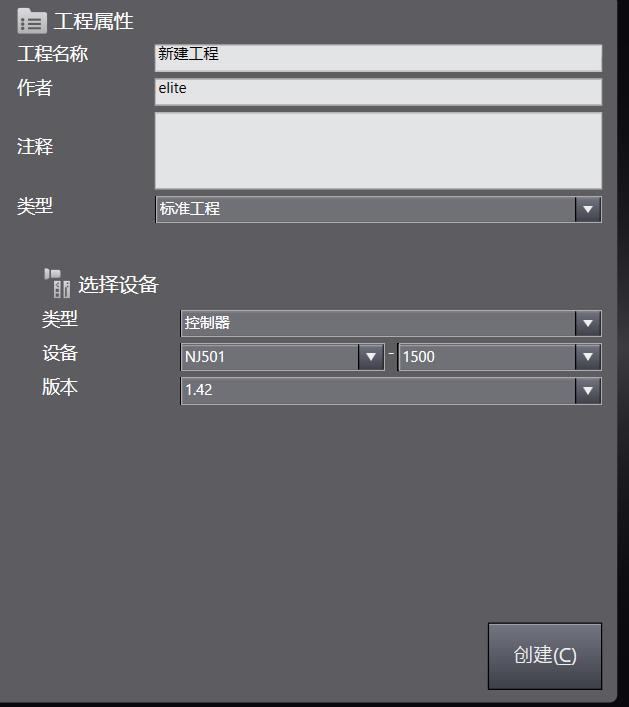
2、选择对应的plc版本,以及对应的设备型号,点击创建
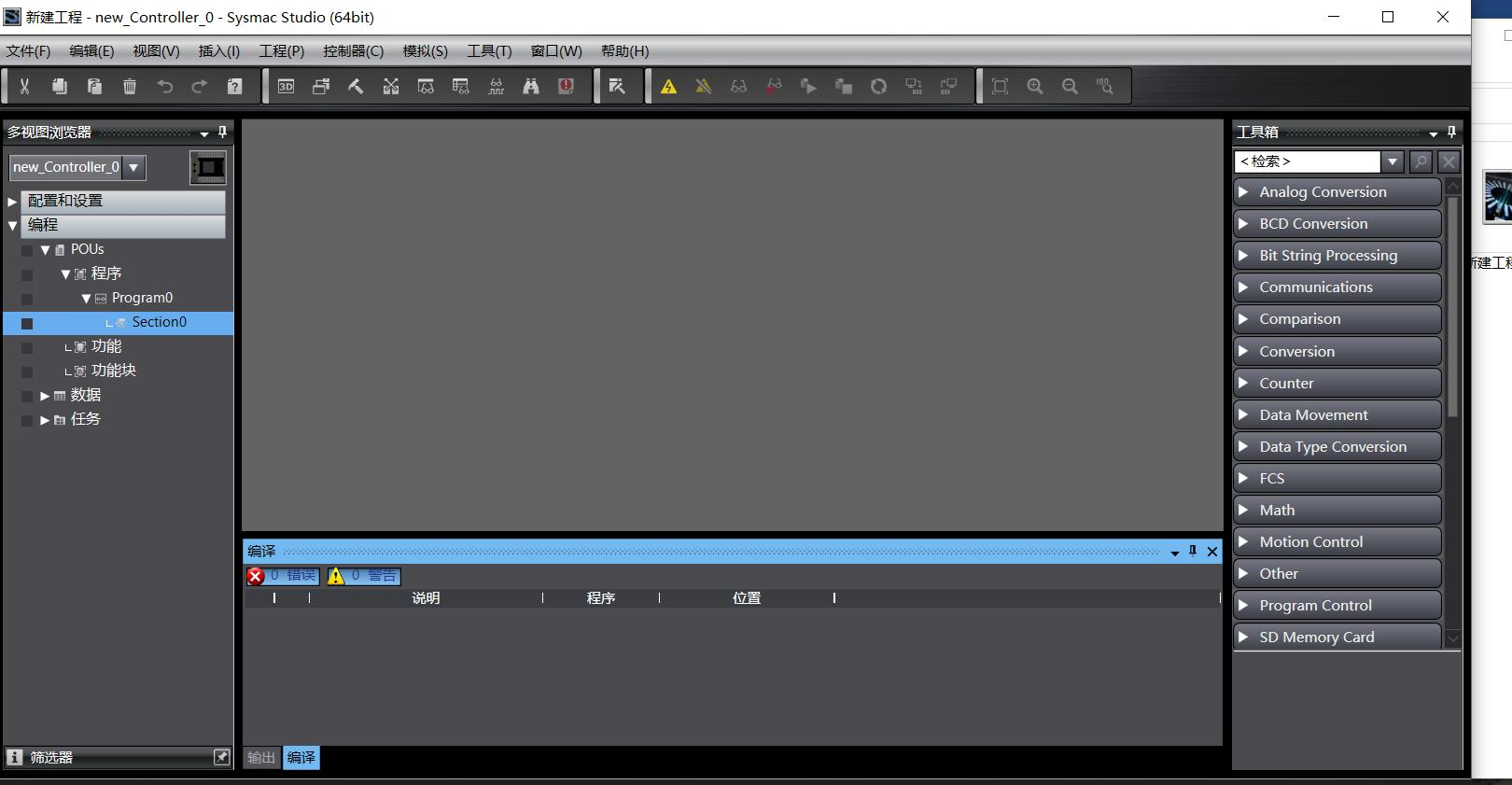
3、创建成功后进入下图
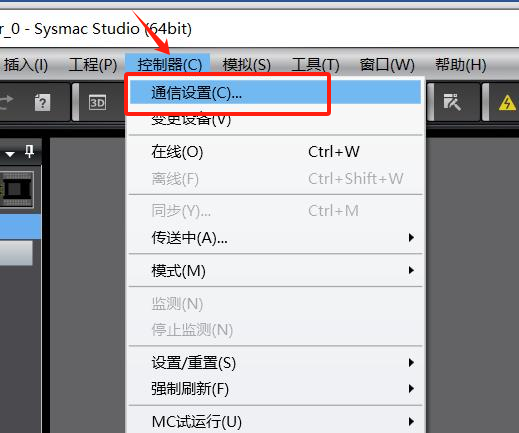
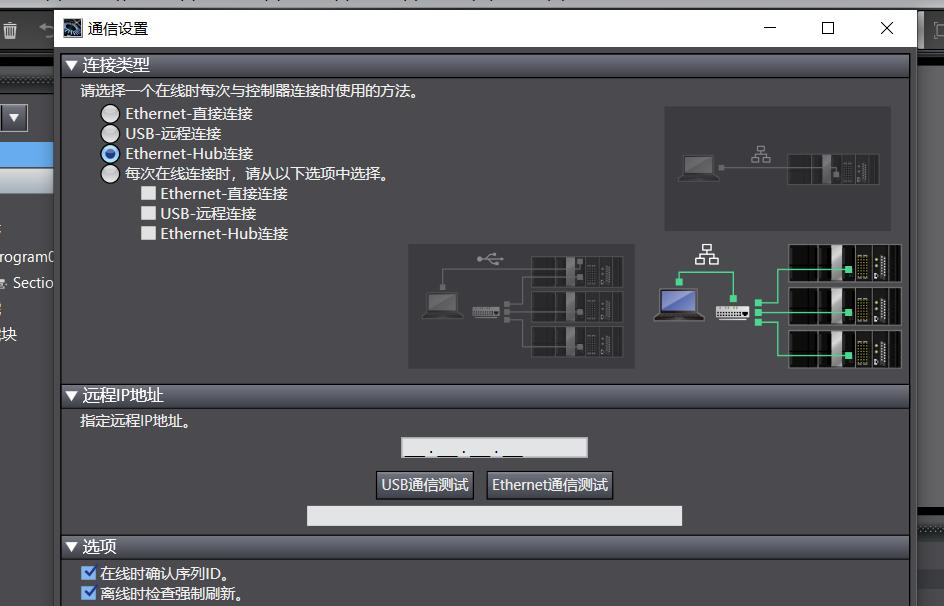
4、找到控制器,点击通讯设置
5、选择Ethernet-Hub连接,并设置远程IP地址,设置完成后并保证pc与plc在同一网段,点击Ethernet通讯测试,看看是否连接成功。(欧姆龙plc初始ip192.168.250.1)
1.4 变量建立
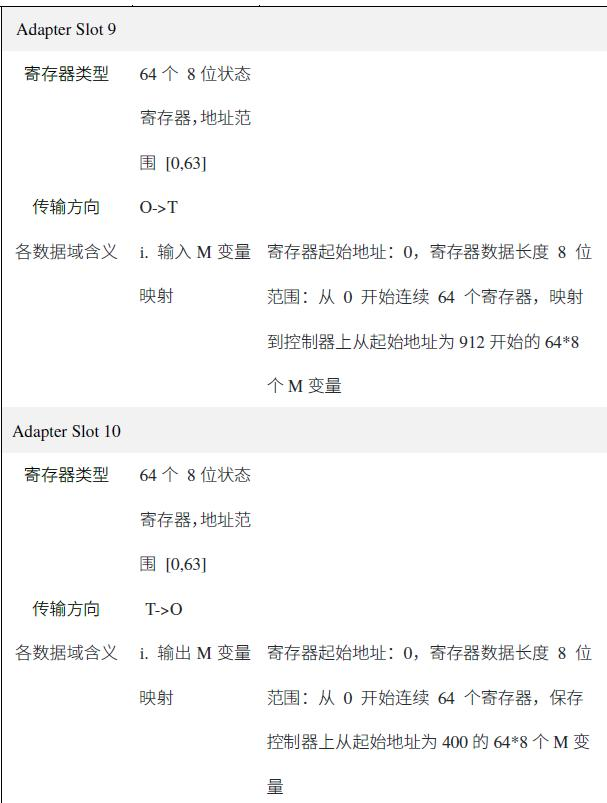
1、艾利特机器人EIP通讯支持10个适配器插槽,对应不同功能,具体请查看艾利特机器人EC系列通讯手册中第4章Ethernet/IP接口与协议。
下面以插槽9和10为例,介绍一下全局变量,这两个插槽主要用来传输虚拟输入输出。
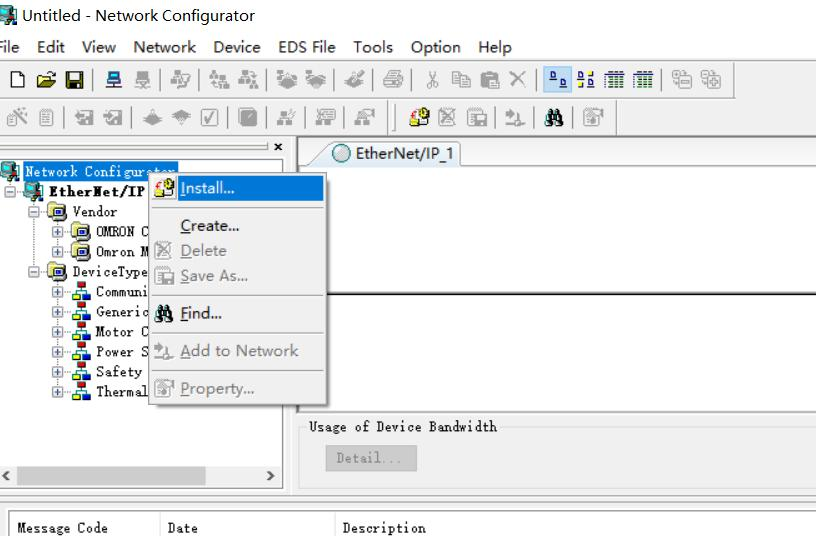
2、 首先打开Network,这个软件可以帮我们看到适配器插槽对应变量的大小,以及目标变量,右击左边栏Network Configurator图标,选择install,找到对应的EDS文件
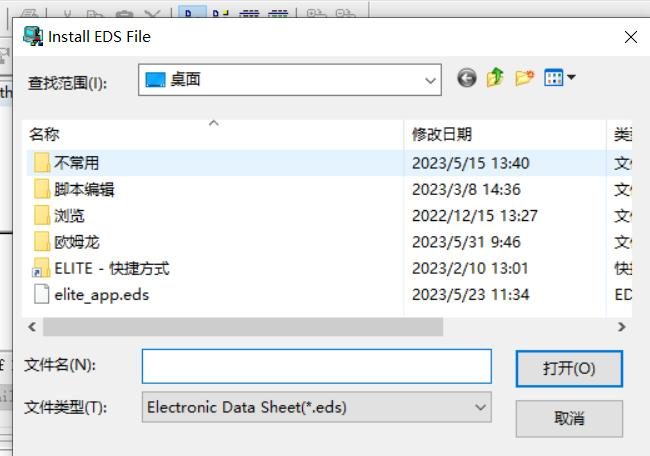
4、双击eds文件添加既可,出现提示栏点击否,添加成功,左侧栏 EliteIntelligence
5、 在文件夹OMRON中的Communications Adapter找到对应的plc型号的文件,双击文件既可加入中间栏,在从Elite Intelligence中找到机器人eds描述文件,双击文件既可加入中间栏
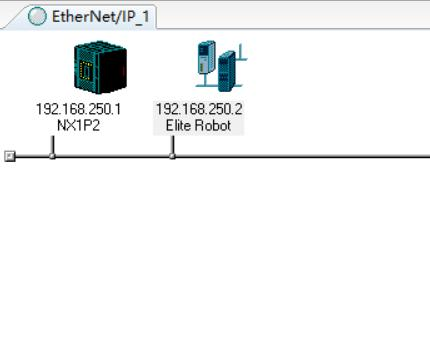
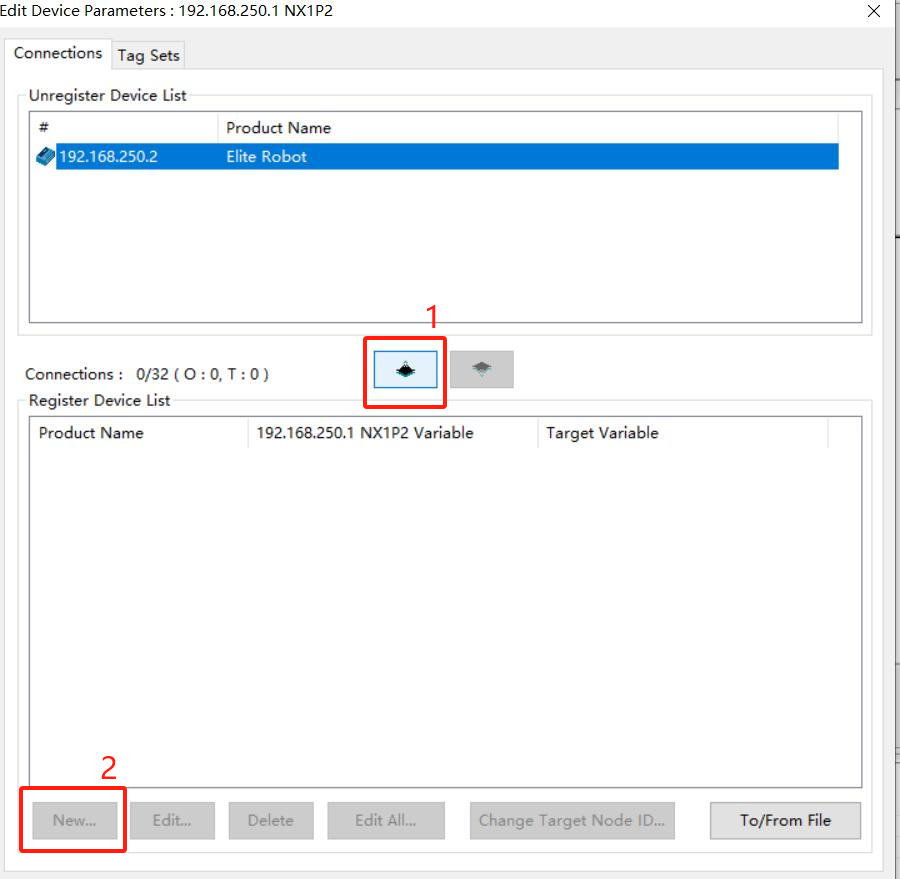
6、 添加完成后双击plc图标,点击向下箭头,出现下方右图后,点击左下角NEW图标
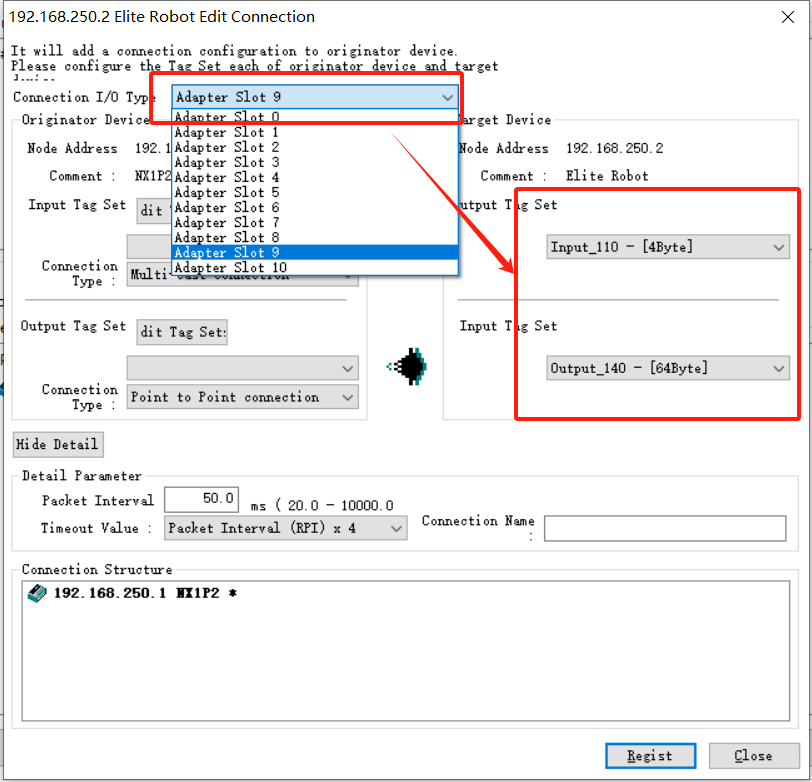
7、 出现下图既可查看对应插槽的目标变量以及需要配置的字节大小,下图中表示的就是插槽9,对应plc输出目标变量140变量大小64byte,输入目标变量110变量大小4byte。
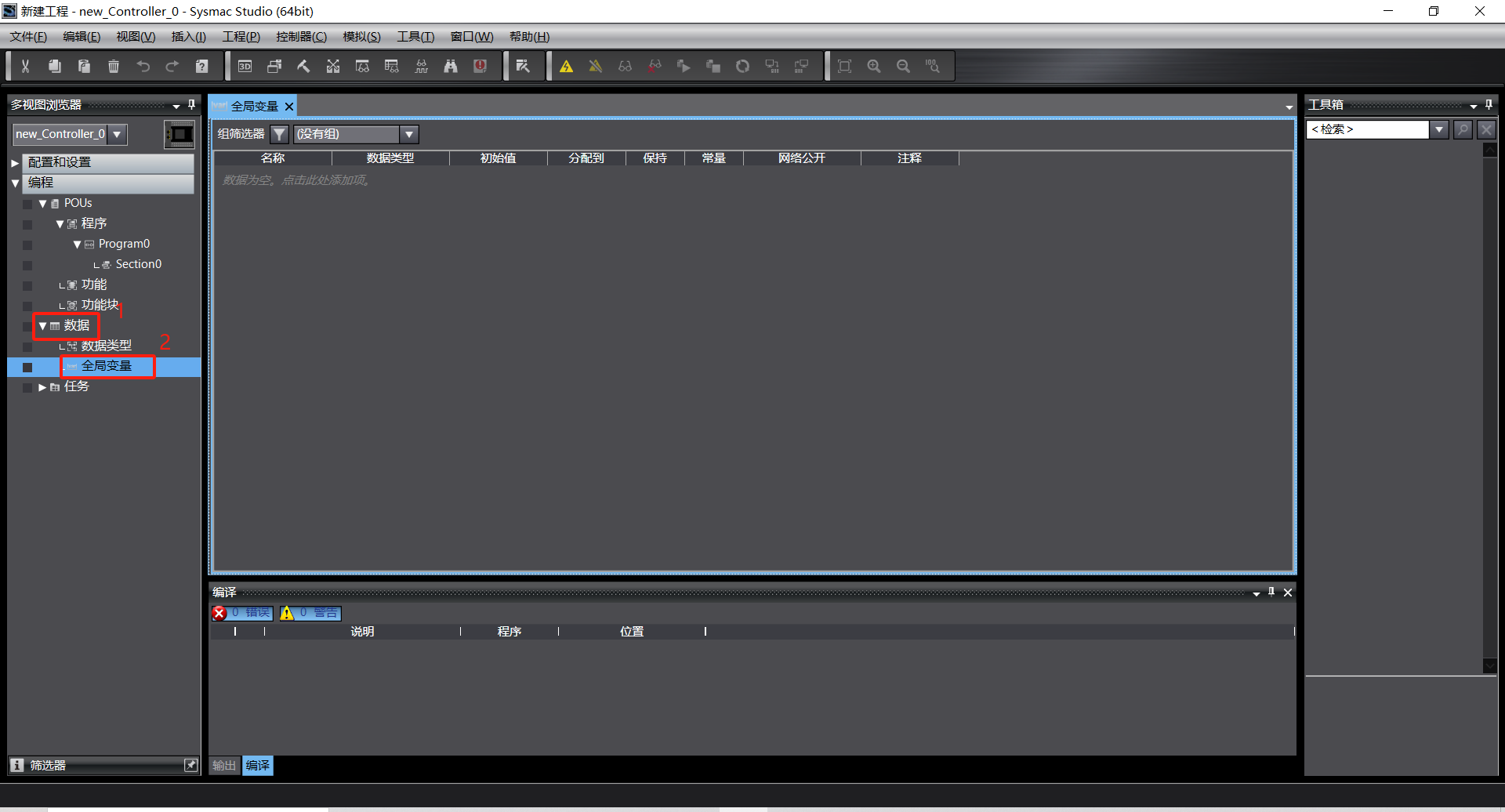
8、Sysmac与plc通讯设置完成后,点击左侧栏数据,找到下面全局变量,双击打开
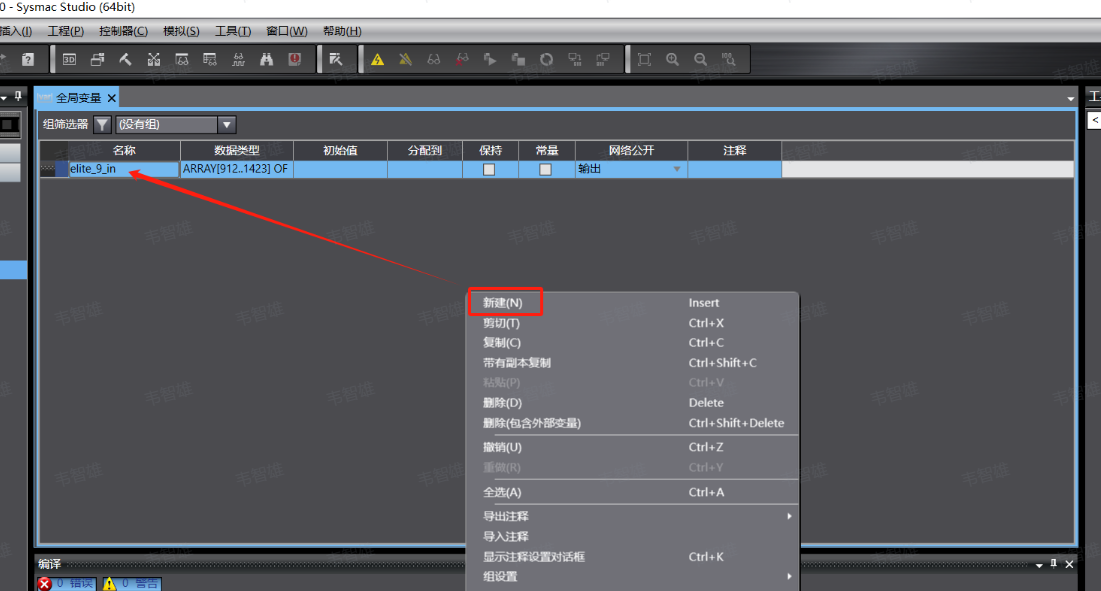
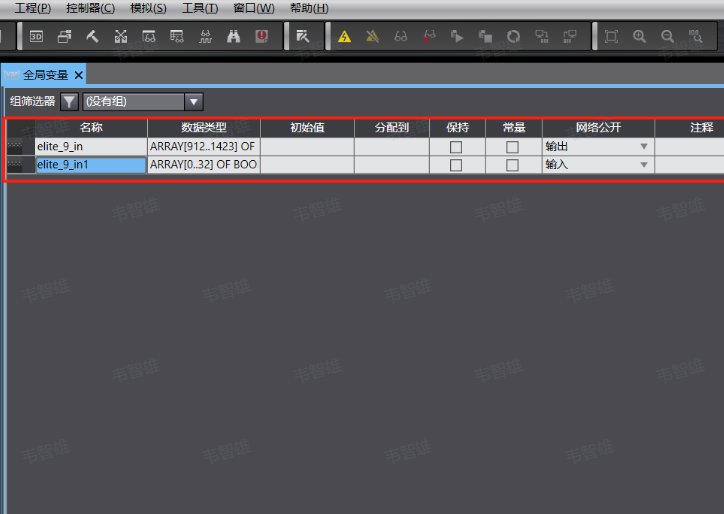
9、点击空白处,新建全局变量创建插槽9,在数据类型中填入ARRAY[912..1423] OF BOOL,(其中括号内为变量从多少位到多少位,具体可参考通讯手册,bool代表数据类型,可以按照通讯手册中来设置大小),网络公开设置成输出状态
10、 由于每个插槽都有对应输入输出,所以设置完输出还需要输入,点击空白处,新建全局变 量,在数据类型中填入ARRAY[0..31] OF BOOL,网络公开设置成输入状态
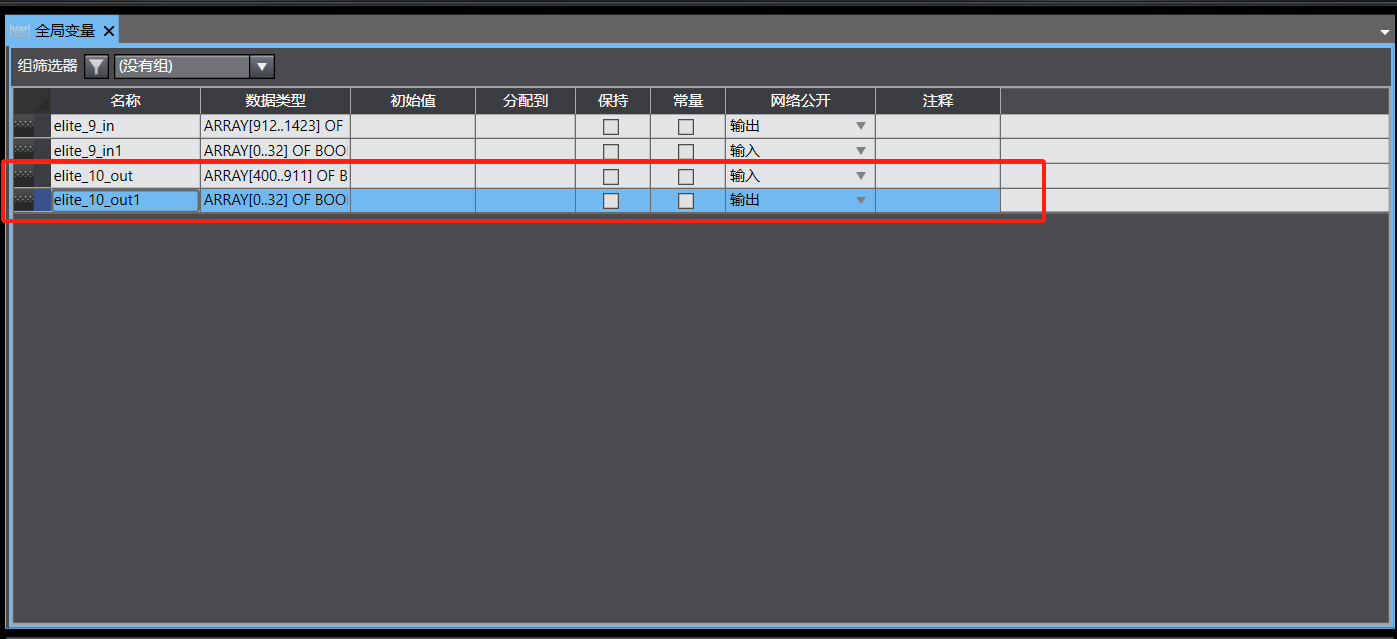
11、 续创建插槽 10,点击空白处,新建全局变量在数据类型中填入 ARRAY[400..911] OF BOOL,网络公开设置成输入状态,再次创建所需输出,点击空白处,新建全局变量,在数据 类型中填入ARRAY[0..31] OF BOOL,网络公开设置成输出状态
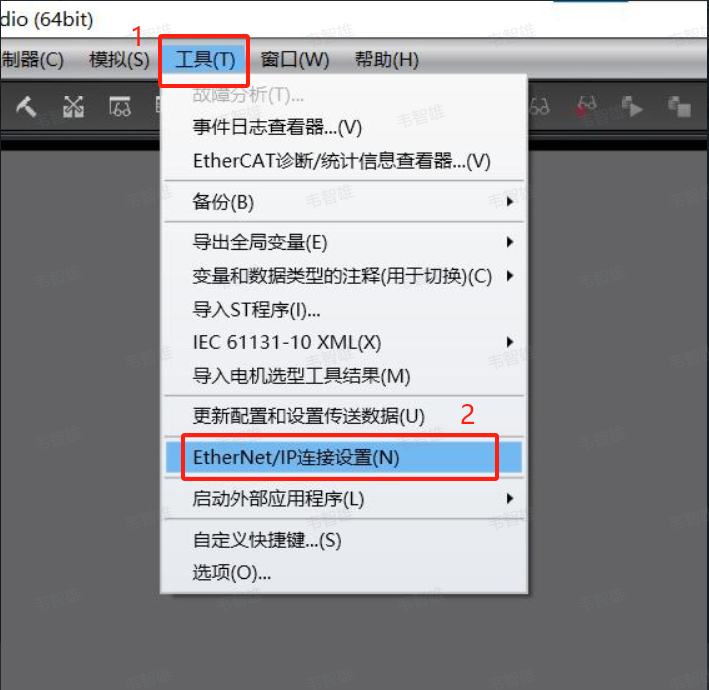
12、 全局变量设置完成后,点击上方栏工具选项,找到 EtherNet/IP 连接设置点击进入
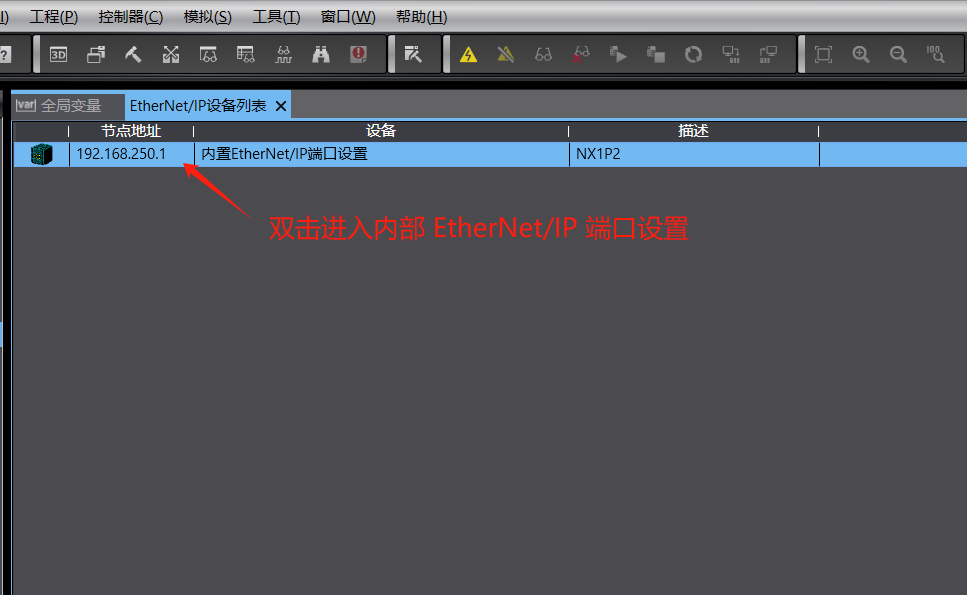
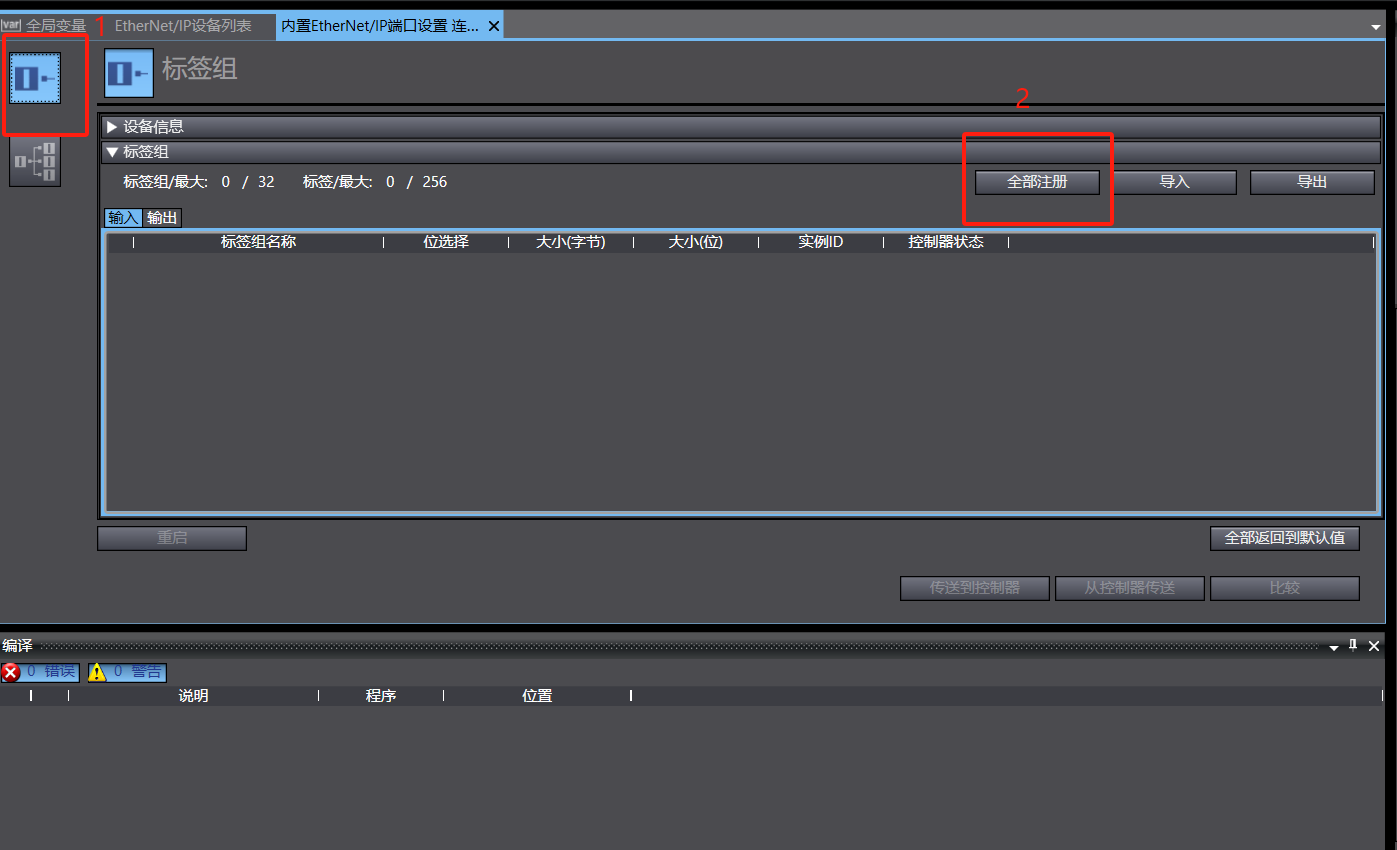
13、 进入内部 EtherNet/IP 端口设置,选择标签组,点击全部注册
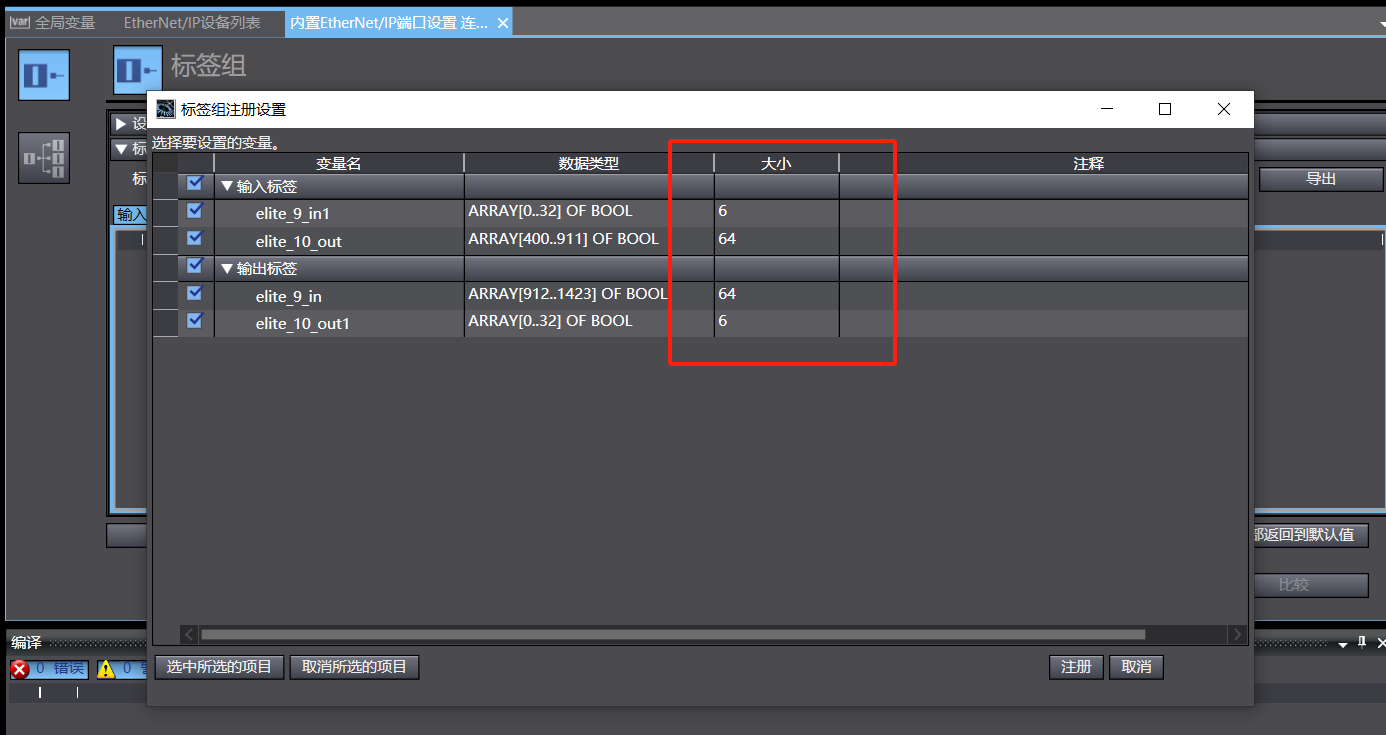
14、打开注册设置页面,注意查看大小是否符合插槽对应变量大小如与其不对应需在全局变量 重新设置,点击右下角注册按钮
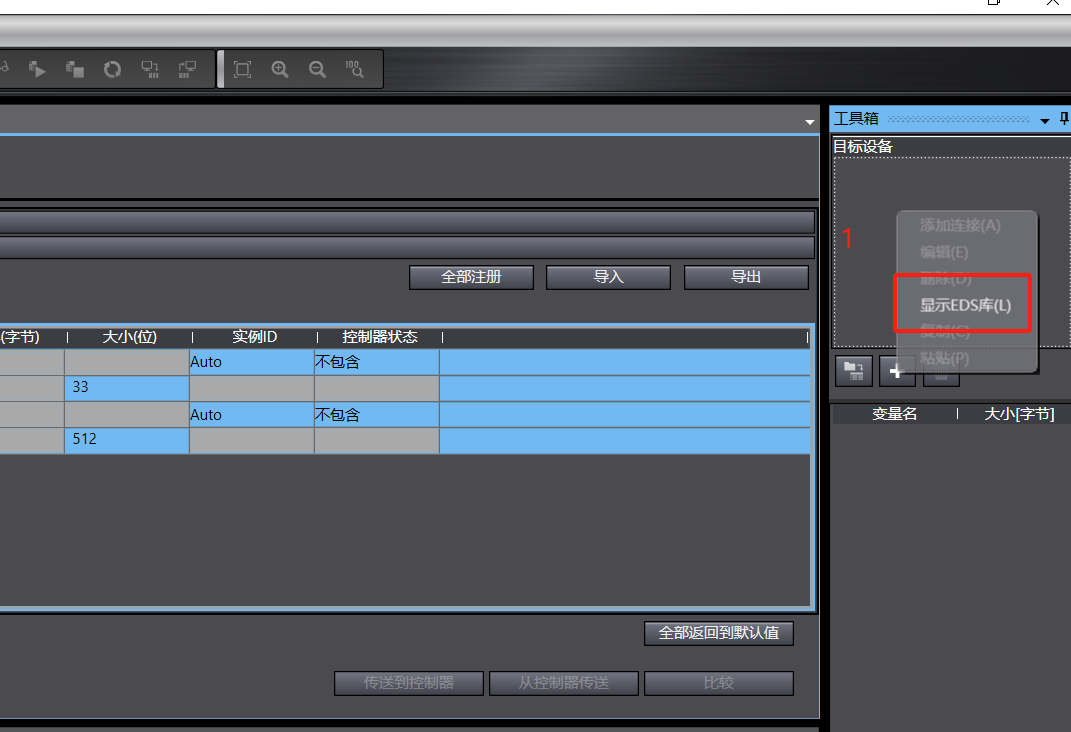
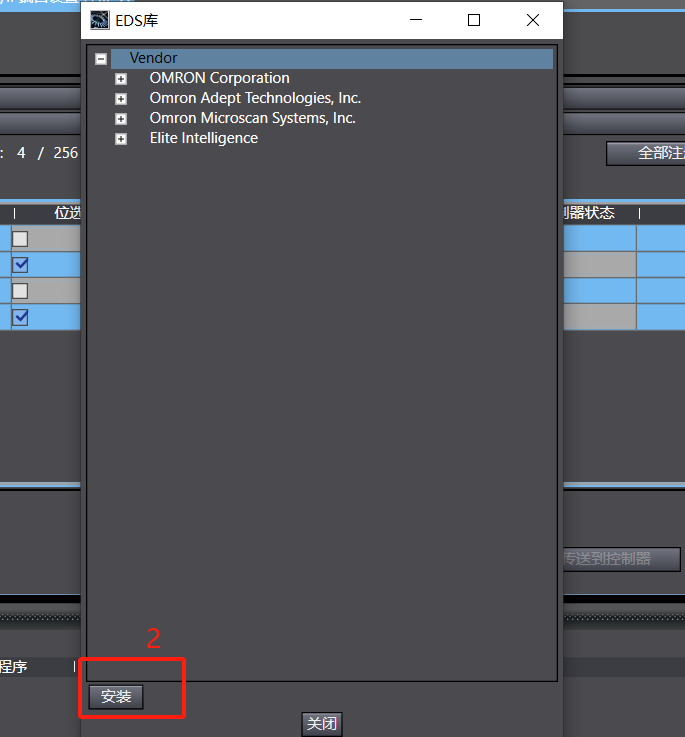
15、 注册完成后点击工具箱空白处,点击显示 EDS 库,点击左下角安装,找到机器人 EDS 文 件安装,成功后页面出现Elite Intelligence
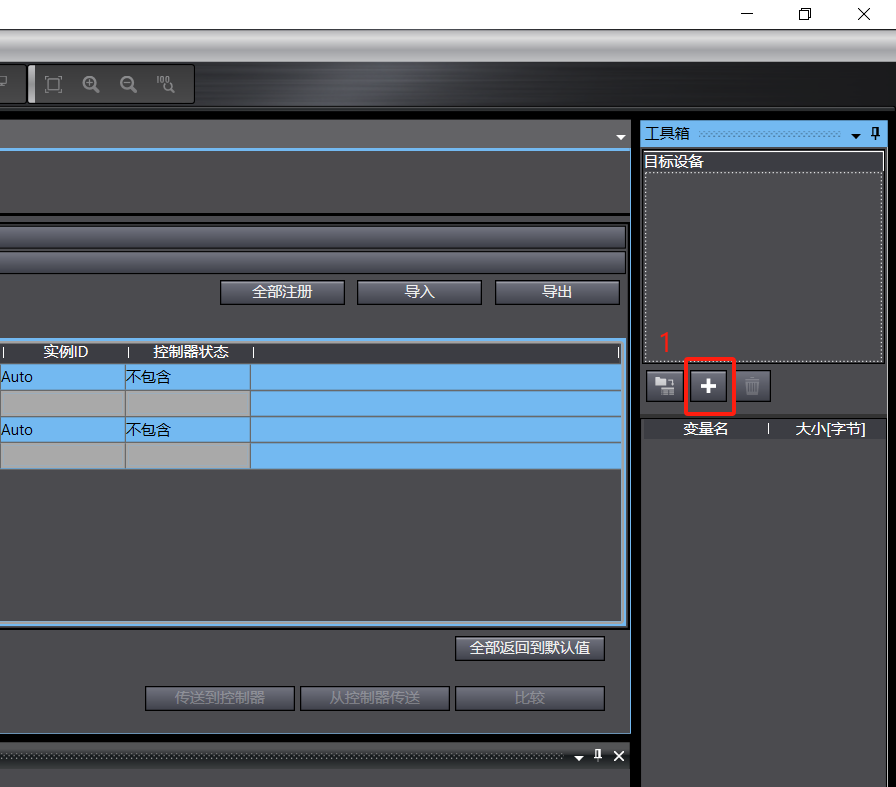
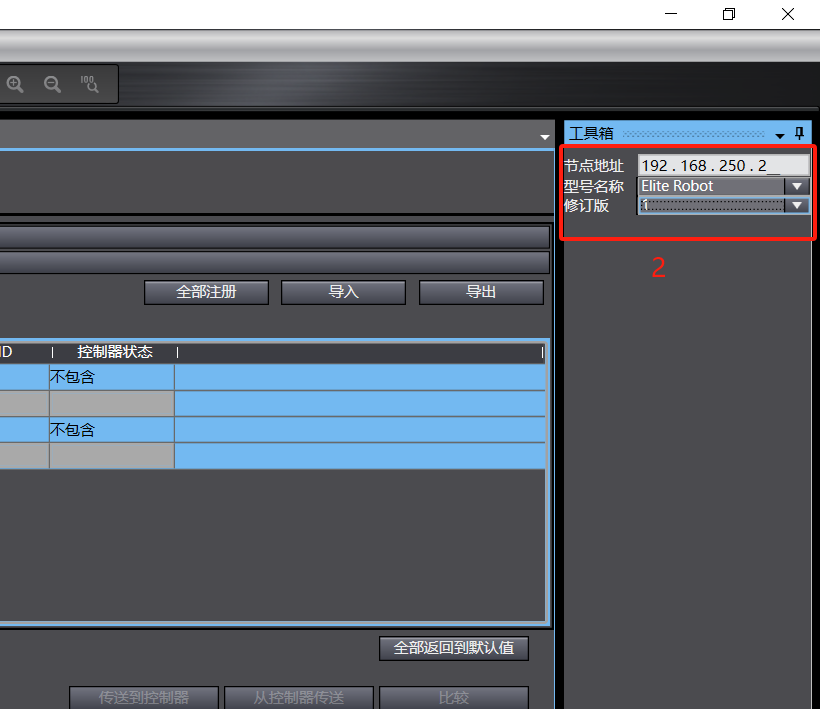
16、安装完成后,点击工具箱下方加号,添加连接节点,节点地址:机器人 ip,型号名称:设 备名称,修订版:版本,设置完成后点击添加
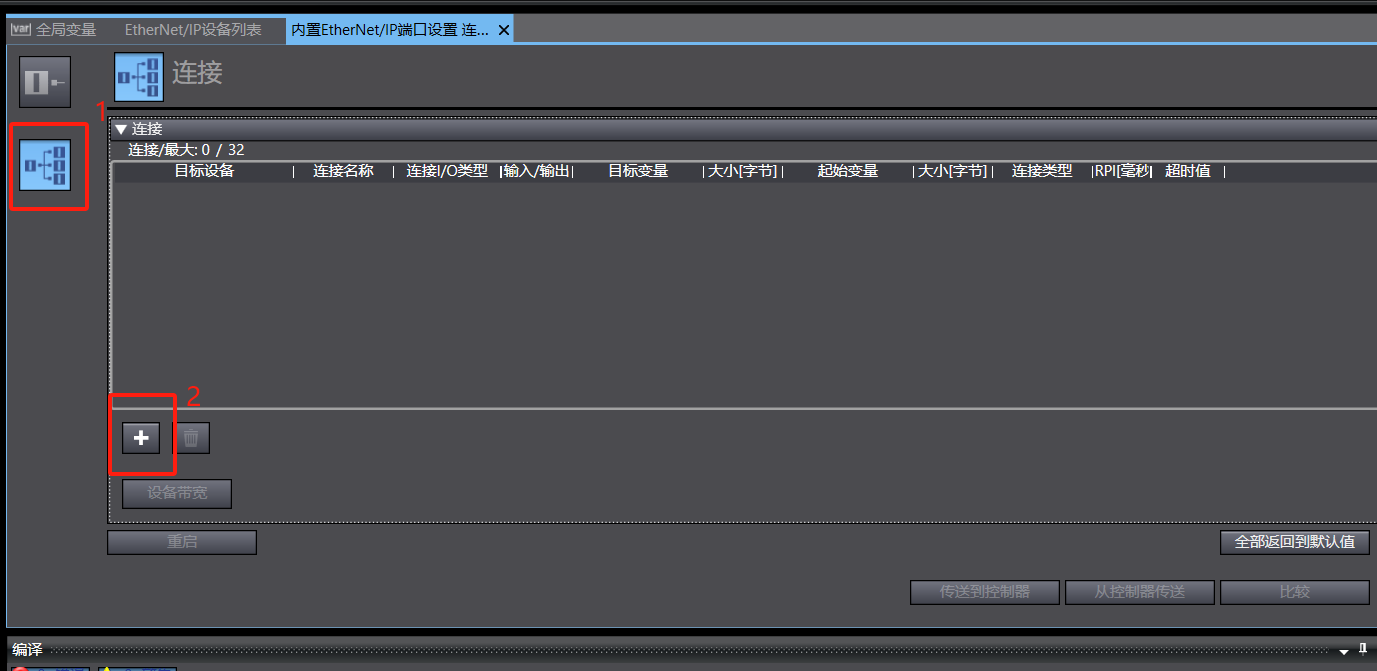
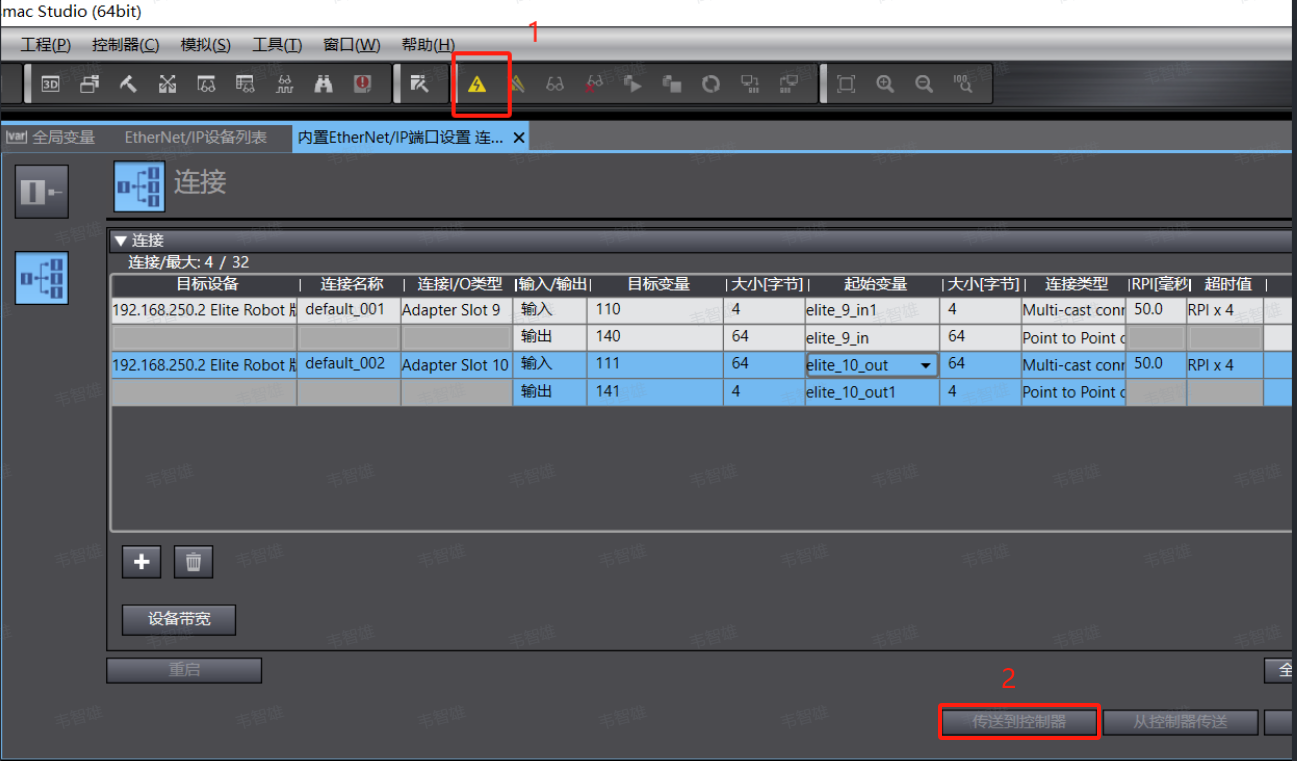
17、设置连接,点击左侧连接图标,并点击左下角加号
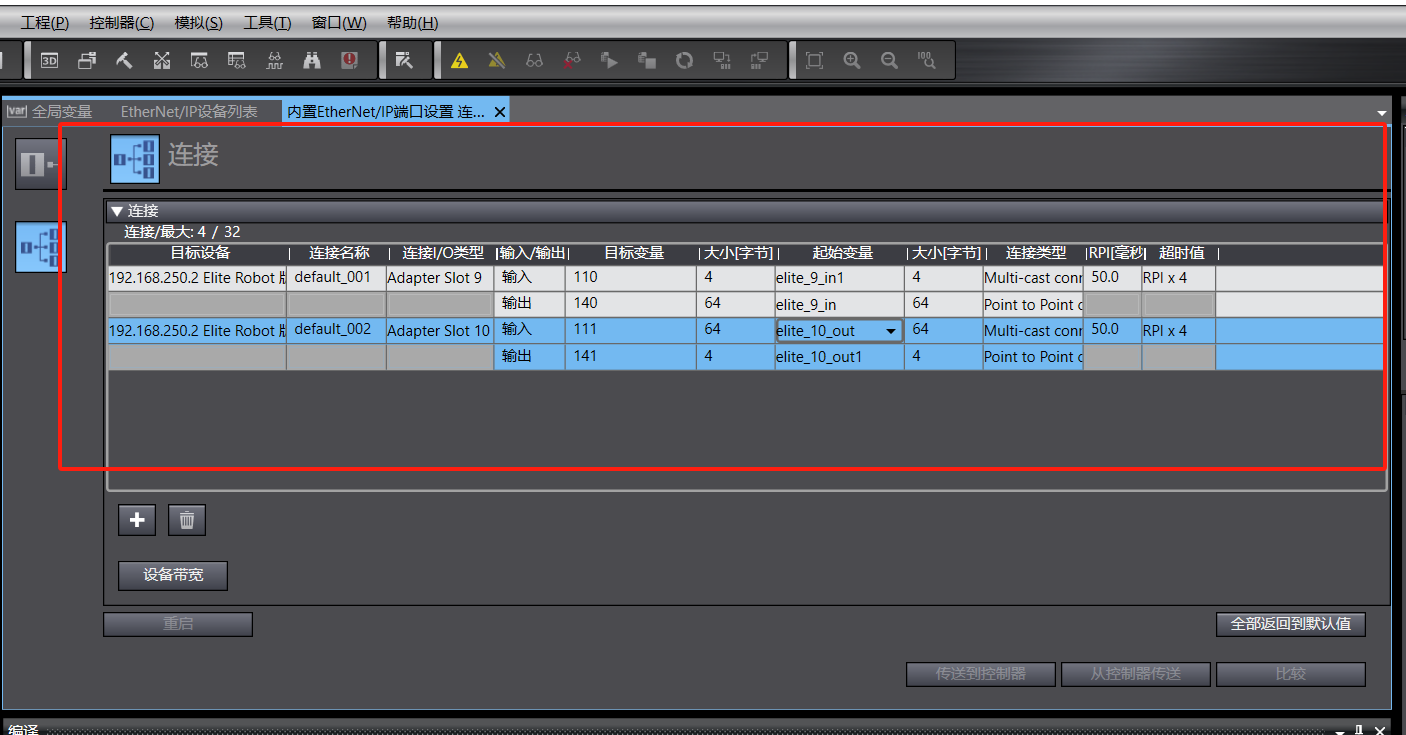
18、 选择目标设备,设置起始变量,目标变量,需根据插槽配置
19、 设置完成后既可进行下载,点击图片中标识,将设备转至在线后点击传输到控制器,出现弹窗点击是,选择在运行模式下执行传送到控制器操作
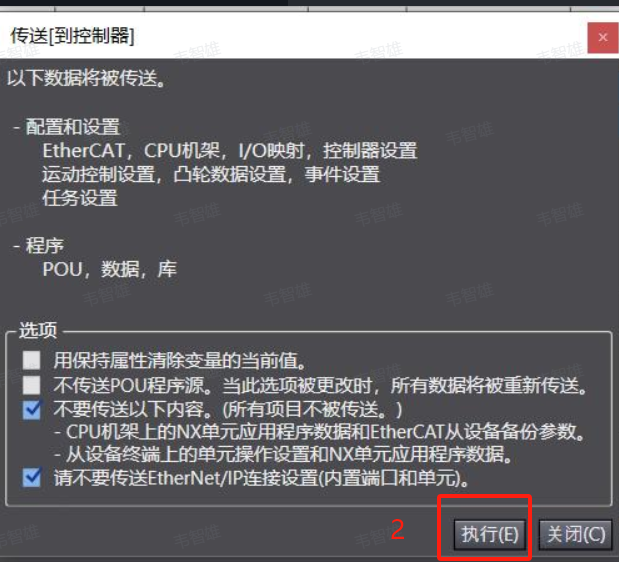
20、 将配置一并传输至控制器,点击图片中按钮,点击执行既可,完成后重启机器人
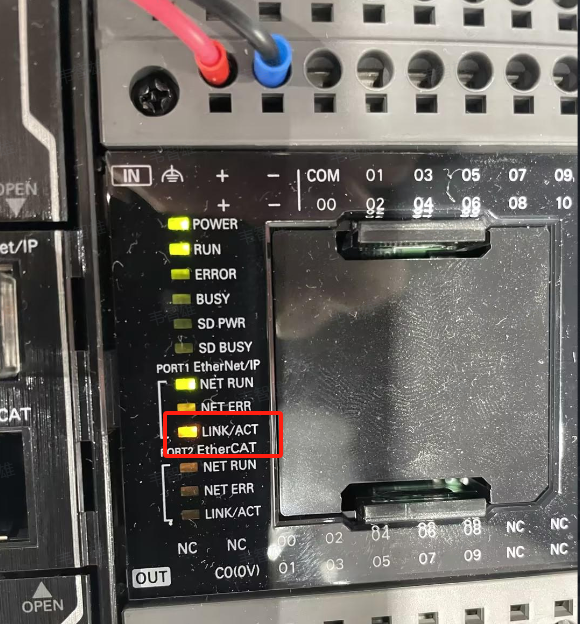
21、 连接成功,LINK/ACT持续闪烁
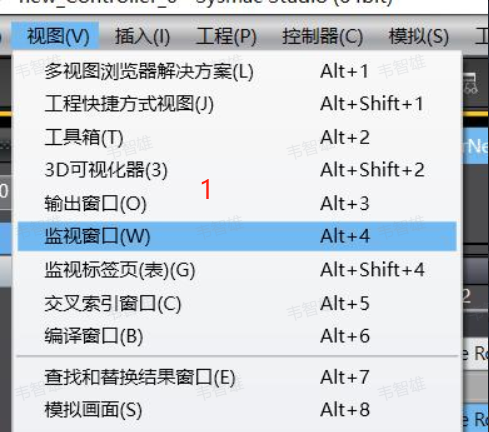
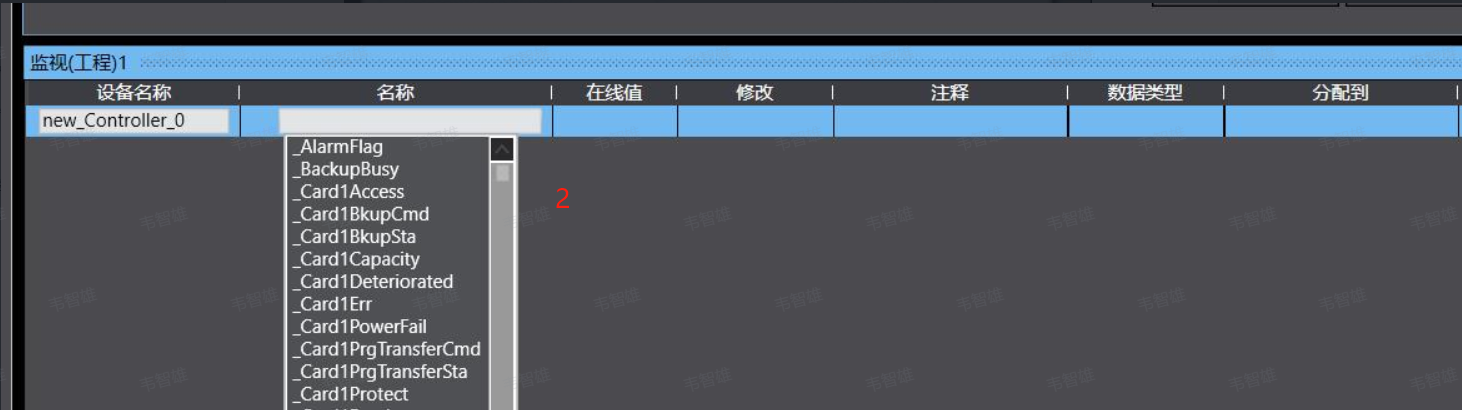
22、 点击视图找到监控窗口,输入变量名称既可对变量进行监控(插槽 10)

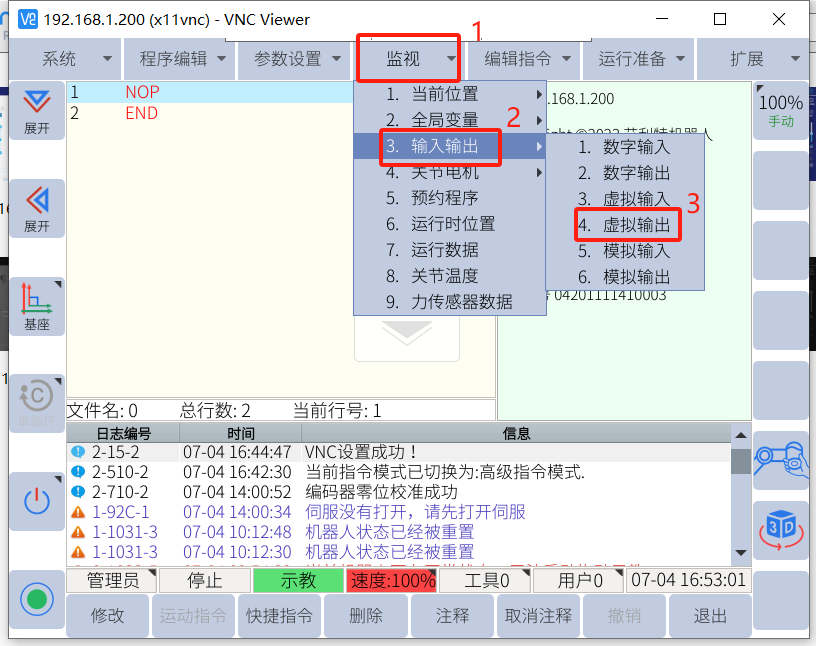
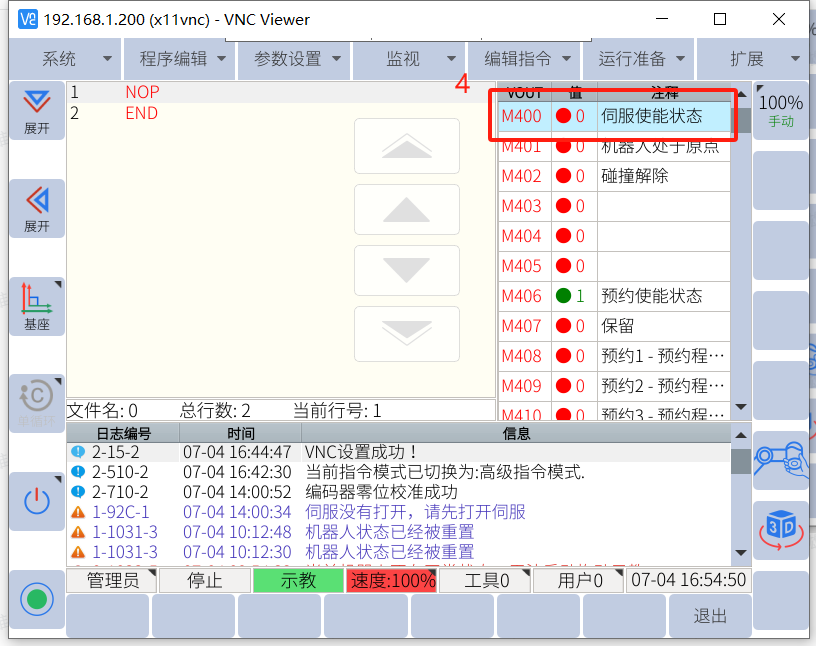
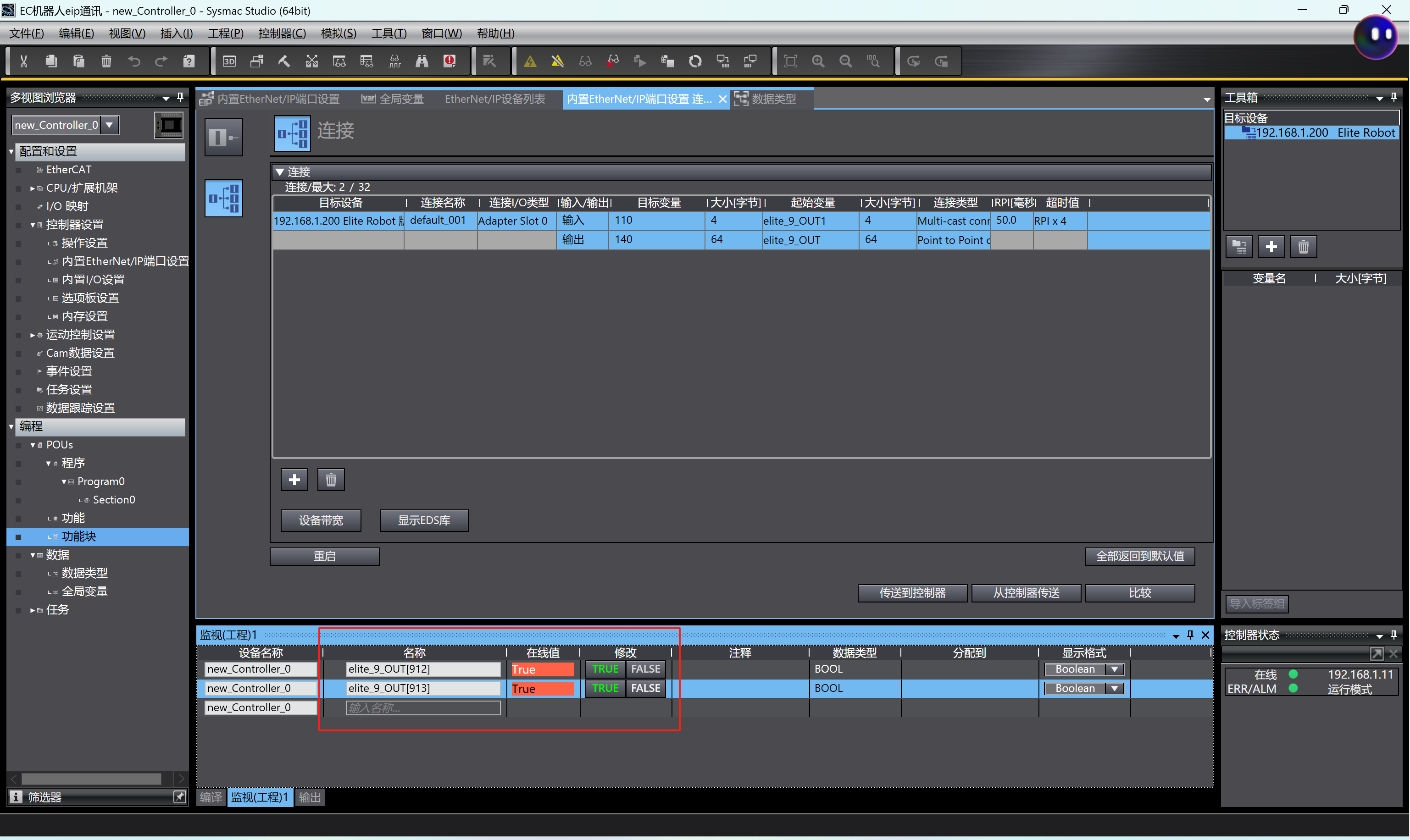
23、 PLC写入机器人M寄存器(插槽 9)

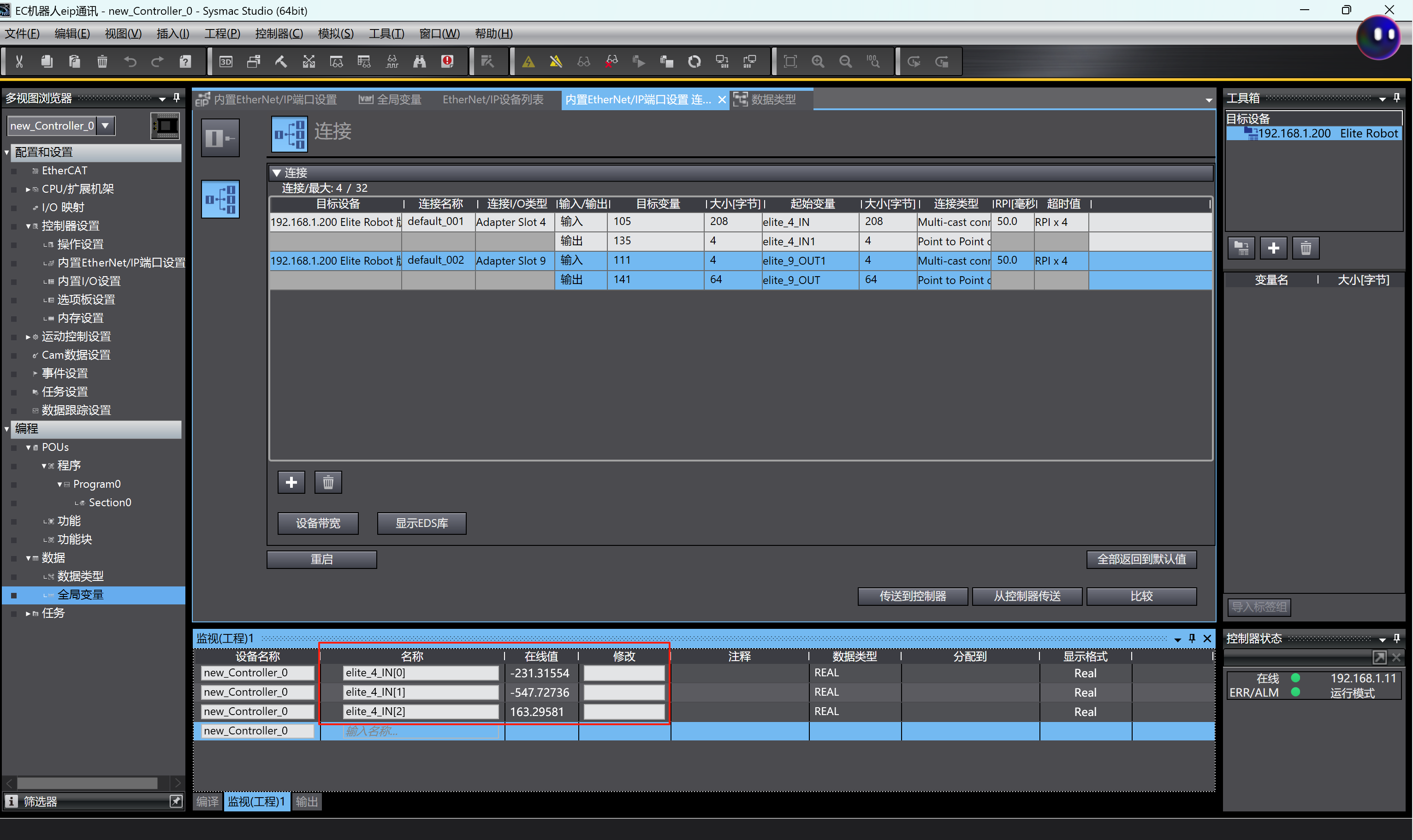
24. plc监控机器人当前位置数据(插槽 4)

3. 常见问题解答
1、 PLC的配置也要一并传输至控制器
2、 读取地址对应不上时需要检查变量起始地址是否3、 与数据表格分配地址一致
3、 机器人寄存器的详细说明可以查看EC_通信协议手册下载中心_机器人技术-艾利特机器人


























