
















CS机器人做modbus从站,配置外部启动
2025-05-28
1.简介
- 前期准备:1.机器手做为modbus从站并已通信上。2.已安装I/O高级配置
2.操作流程
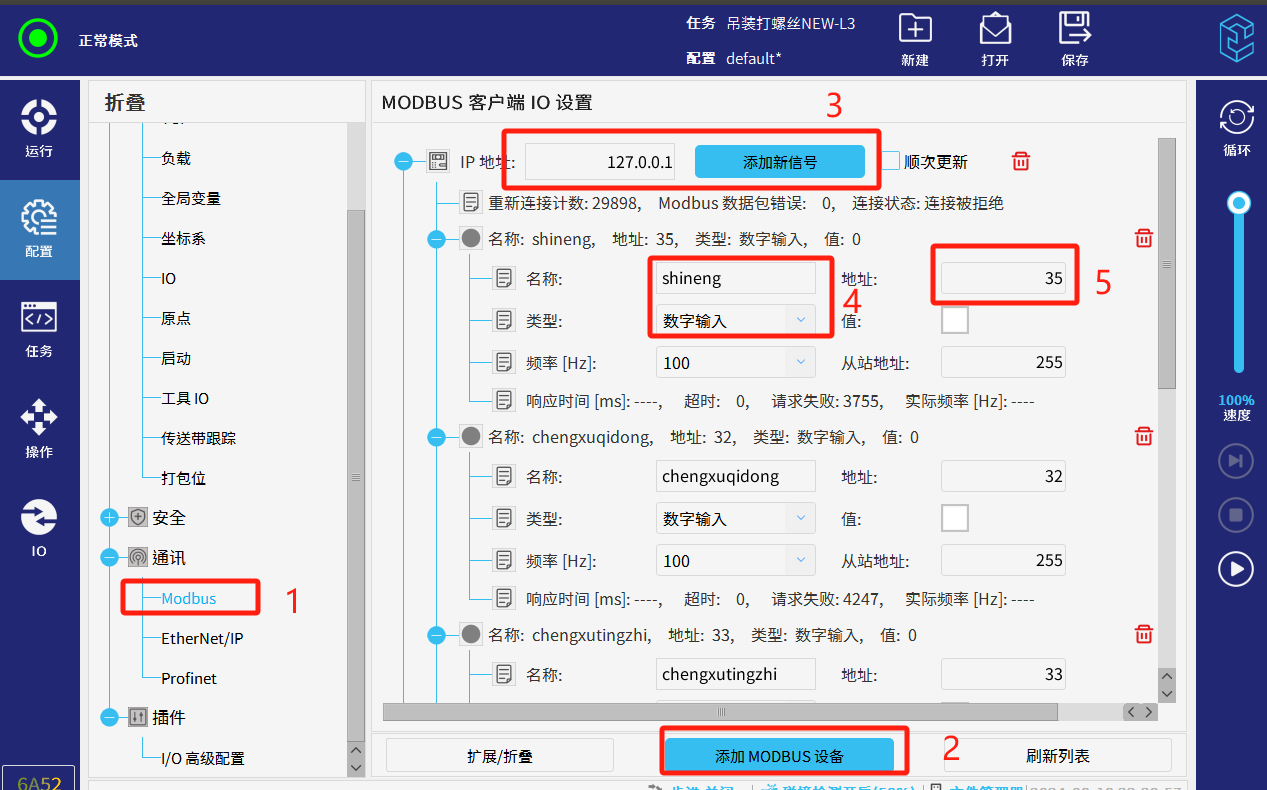
点击机器人示教器配置--通讯--modbus--添加modbus设备,输入ip(127.0.0.1属于机器人内部mudbus从站内部地址)
如图4和5处,设置每一个信号名称、类型、地址。
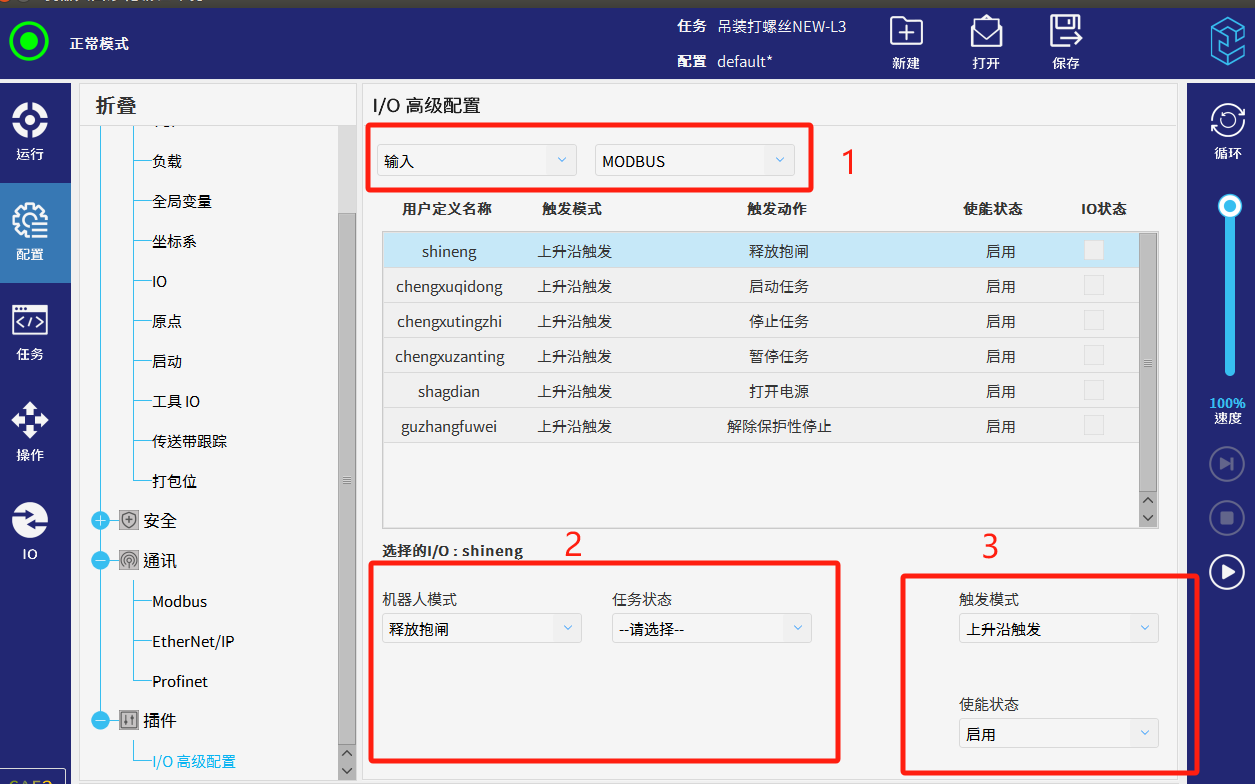
完成需要用的信号设置后,切换到I/O高级配置页面。
- 切换modbus,选择输入或输出信号。
- 选择该信号需要实现的功能(如:机器人上电、下电、释放抱闸、任务启动等)
- 选择触发模式,和使能状态(默认为禁止,需每个手动切换到启用)
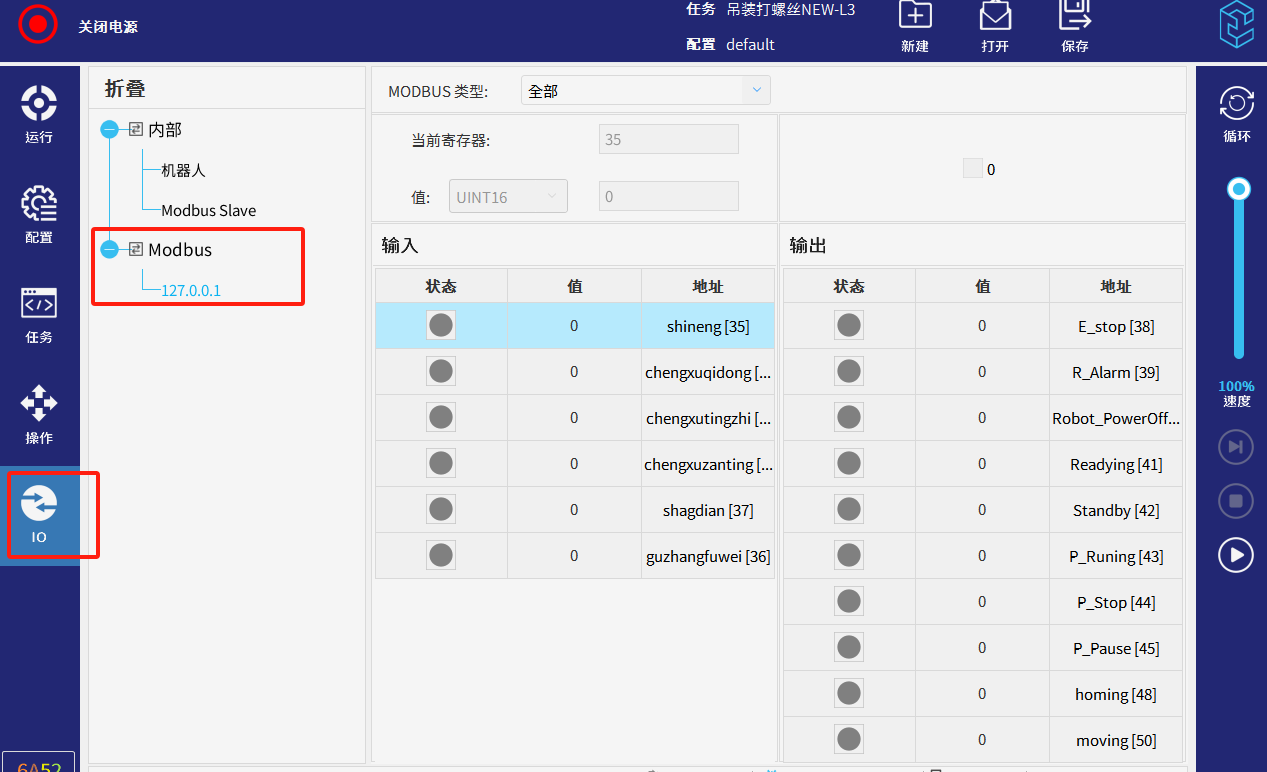
查看配置信号状态
- 可在左侧栏目IO--modbus,查看已配置好信号状态
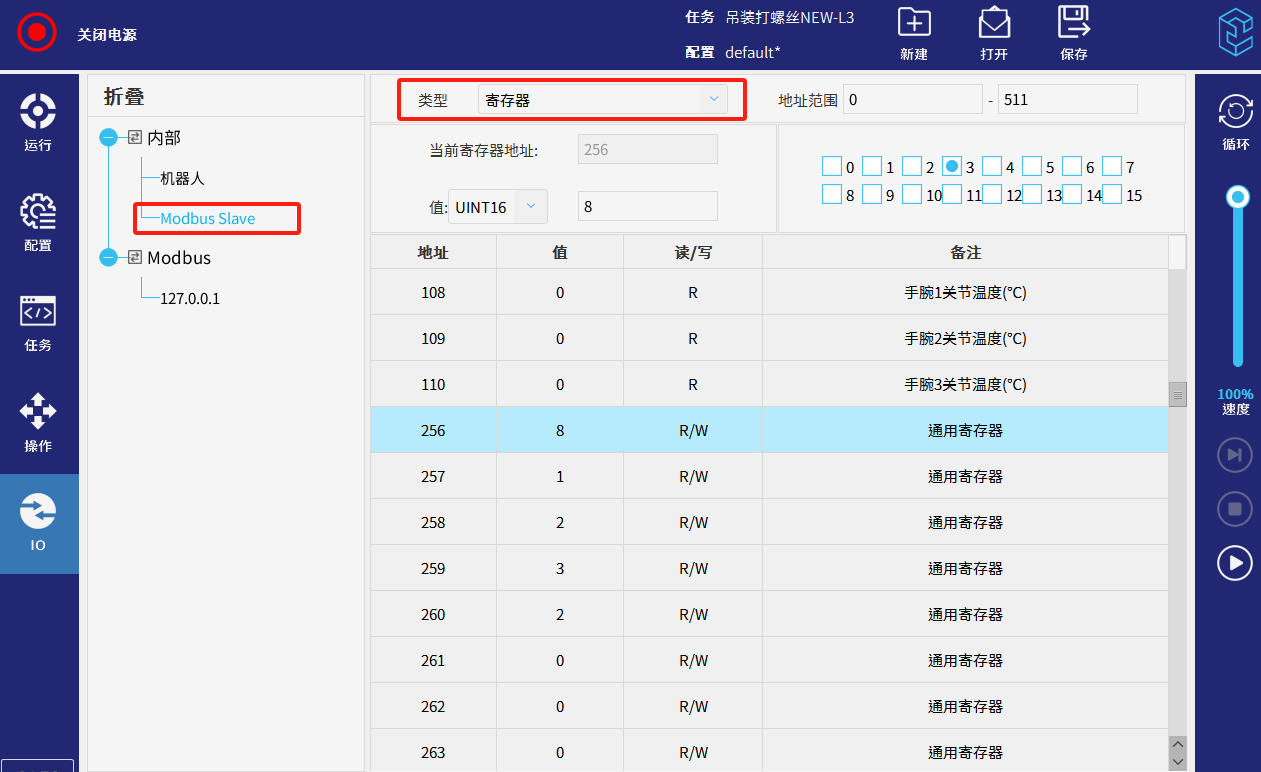
- 内部--modbus slave,可以查看状态和控制(数字输出32,通用寄存器256地址开始)
- 可以根据对应地址上的读/写权限,读取机器人的状态,位置信息等数据或写入新的值
3.常见问题解答
1、I/O高级配置页面需要信号确认名称和类型后,才会显示。
- 使能状态注意切换,默认都是禁止。
- 使用内部mudbus作从站,把信号配置数字输入信号,需要牺牲数字输出信号作输入。如下图配置地址从32开始。



























