
















CS机器人程序编写建议
1.简介
为使用者编写出更加有质量、更加高效的程序,以便于程序的存储、交流以及后期维护,下面对编写ELITE-CS协作机器人程序的文件命名、层次和编写规则做出以下推荐
2.操作流程
编写程序遵从,少示教点位,逻辑清晰,程序命名完整,方便理解,减少重复编写,
2.1程序命名
单个程序在命名时格式为“程序名称(如工站名称,工件型号)+日期”,日期为程序编写时日期,如下图所示。

2.2程序编写规范
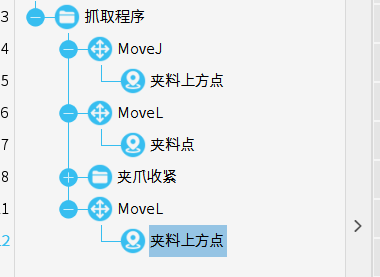
2.2.1move指令规范
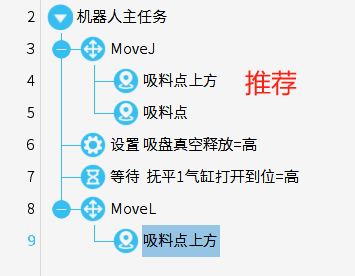
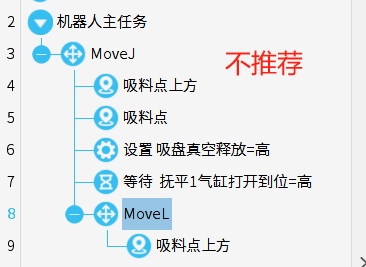
程序中move指令下只可以写路点,不允许添加其他指令,如下上图为推荐编写规范,下图为错误示范,注意对比和区分。
如果move里面嵌套其他指令,或者一直嵌套在里面,整个程序会没有条理,不利于其他工程师阅读程序。
路点名称建议改成当前动作名称,如:吸料点,吸料上方点,抓料点,抓料上放点,放料点,放料上方点。
2.2.2主程序规范
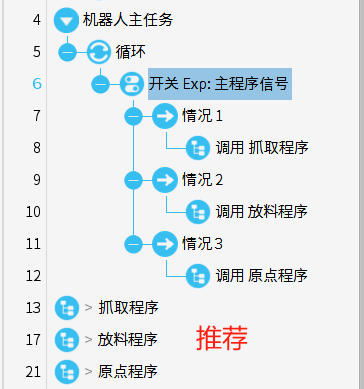
主程序使用,建议只写逻辑指令,不建议写运动指令,使用逻辑指令编写主程序,可以简化代码,提高复用性和可维护性,使程序更灵活、易于理解和升级。
推荐在主程序里加循环,防止有人更改循环模式,导致程序无法运行。

2.2.3建议使用初始化程序
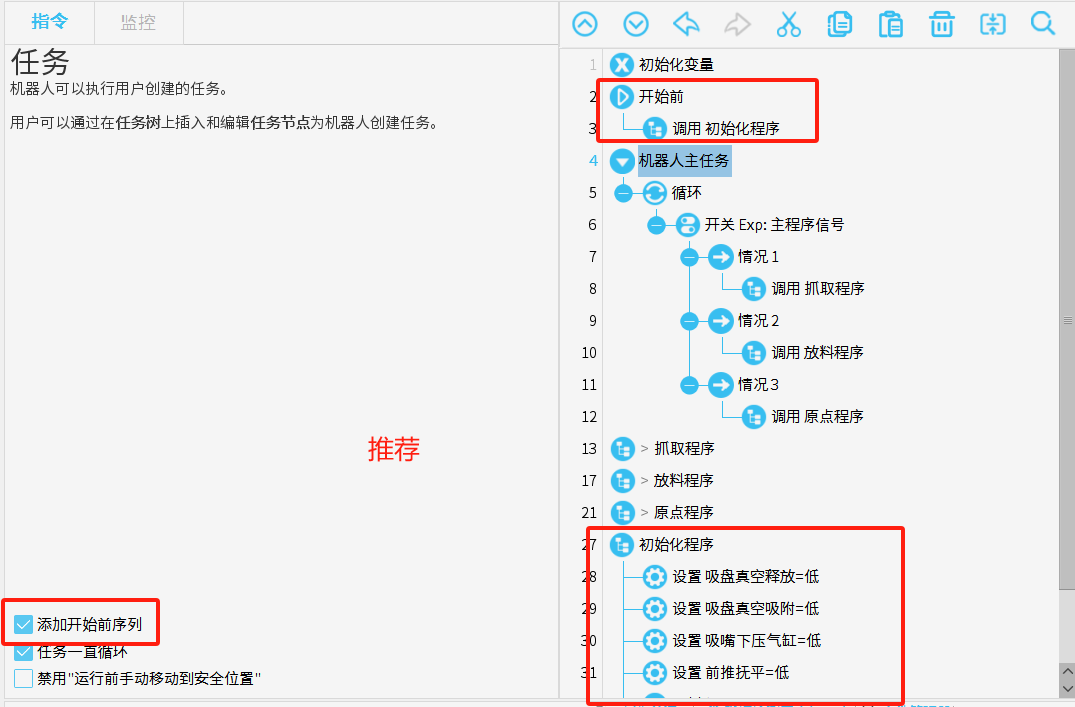
初始化程序中,包含信号初始化,变量初始化等,在开始前执行,好处,在程序开始前进行信号和变量的初始化,可以确保程序运行的基础环境是稳定和一致的。这样做的好处包括预防未定义状态导致的运行时错误,提高代码的可读性和可维护性,以及简化调试过程。此外,它还有助于提升程序的执行效率,因为避免了在运行过程中对变量状态的重复检查。总的来说,初始化是确保程序健壮性和可靠性的重要步骤。
如有只需要再开始前执行一遍,就可加到开始前内执行
2.2.4文件夹指令
在程序中多次使用重复信号点位,如抓手程序,吸盘程序,因子程序无法调用子程序,建议使用文件夹,具体情况请看下图
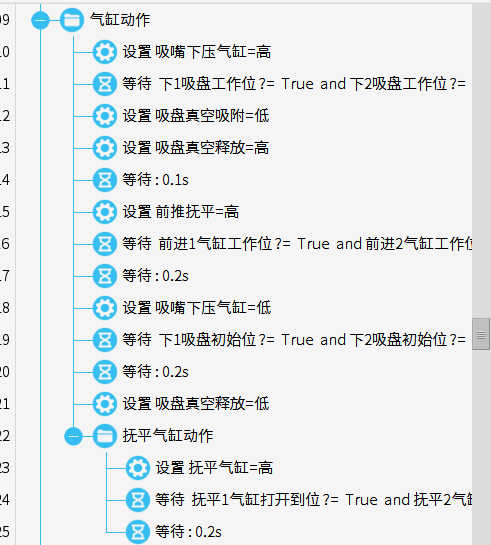
也可以将一段程序写在里面,以方便描述程序内容,具体可以参考下图
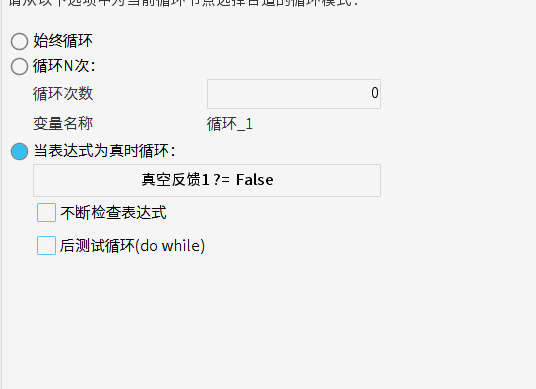
2.2.5循环程序使用
由于CS机器人程序使用Python编写,无法使用跳转功能,推荐采用循环实现同跳转功能
举例1、吸盘信号真空信号判断是否真空失败
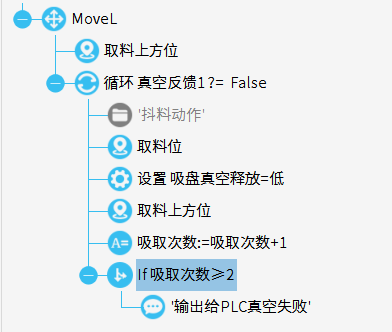
上面程序就是一个简单的真空失败程序,连续取料两次,都无法真空的话,就输出真空失败报警。
不同的情况可以选择不断检查表达式来满足要求。
3. 注意事项
由于程序使用python编写所有建议遵循python编写规范
下面进行举例说明,如下图
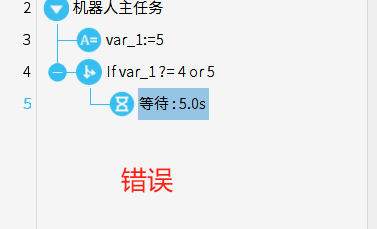
图1
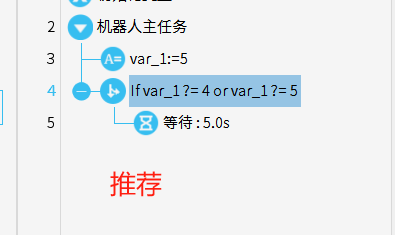
图2
上面采用IF进行举例,例如程序树中的等待,循环(while)都不可以使用图一编程方式


























