
















CS机器人干涉区插件使用手册
2025-05-27
1.简介 :
在多个机械臂互相协同作业时,有共同的取料区域/放料区域,需要一个互锁信号/需要给PLC发送信号(此信号无论是否处于自动运行模式都可以自动输出信号)
2.操作流程
(1):安装安全区插件(参考插件安装手册)
(2):如图2-1 点击 配置(1)-干涉区(2)-点击立方体图标(3)新建一个立方体干涉区

图2-1
如图2-2 设置立方体的两个顶尖对角:设置顶点1 设置顶点2
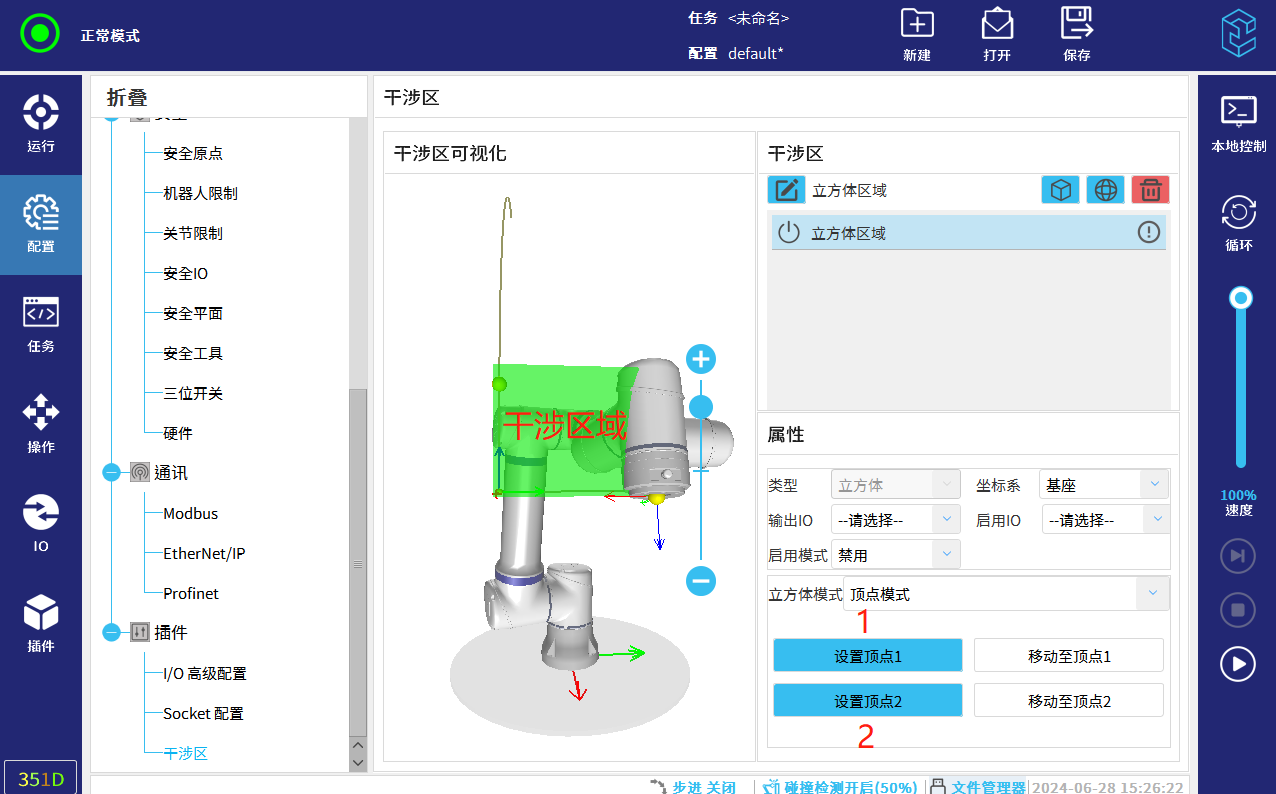
图2-2
(3):如图2-3 设置机械臂进入干涉区绑定的DO信号(寄存器插件的DO信号也可以绑定 需要改名字下拉栏才会显示)
当机械臂检测进入干涉区会自动输出,输出IO内填写的DO信号
启用IO:通过设置对应DI 进行开启或关闭干涉区
启用模式:1开机时启用
2运行时启用
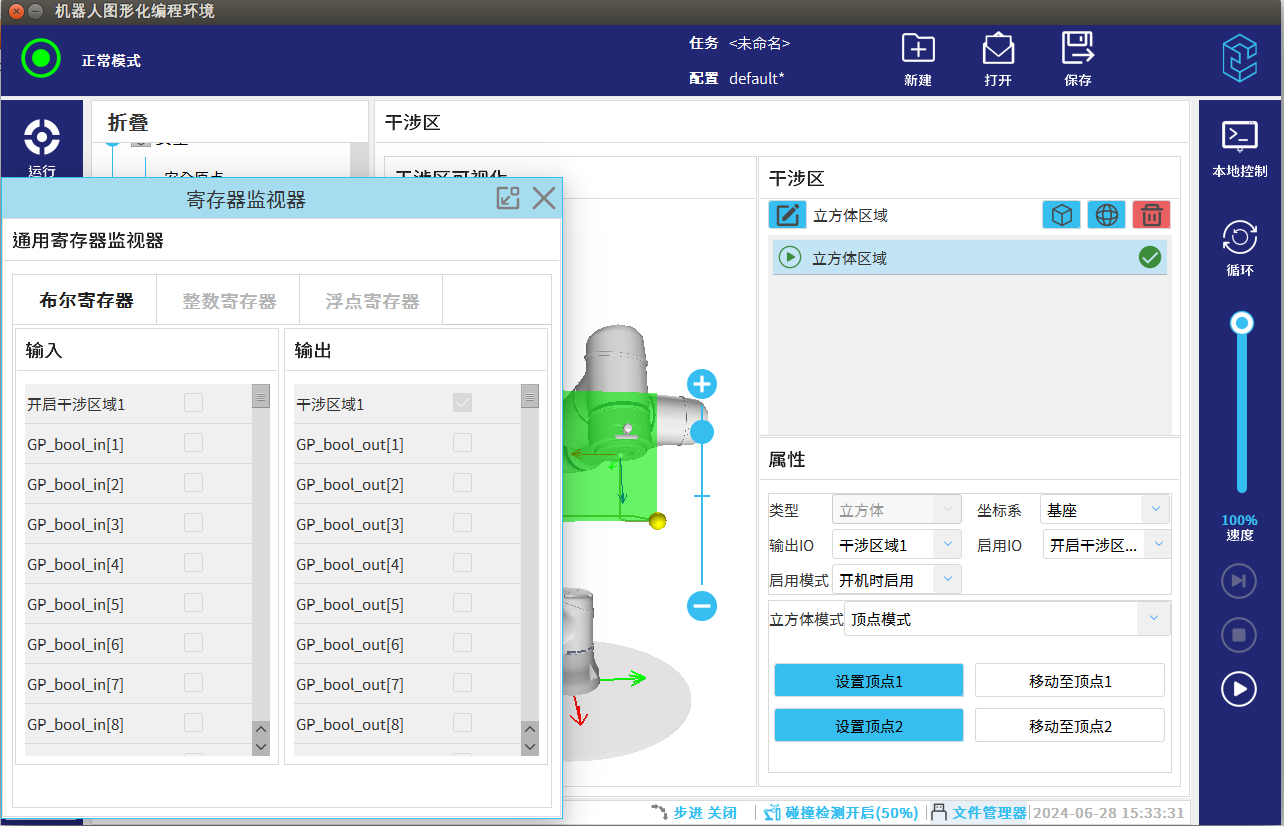
图2-3
(4)立方体视频演示:
video(26).mp4
(5)球形干涉区设置:
如图2-4 配置-干涉区-添加球形干涉区 -绑定DIDO-示教球心-设置球半径
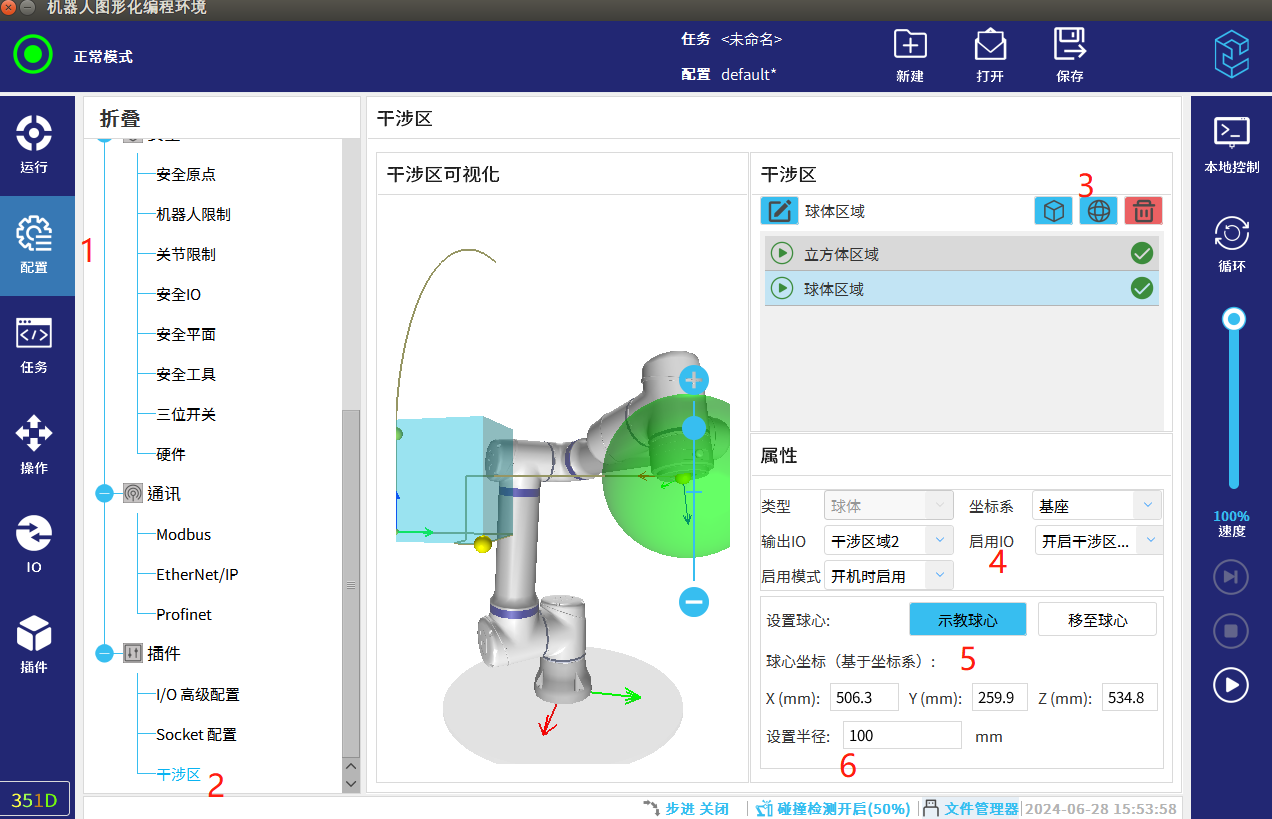
图2-4
(6)球形干涉区视频演示:
video(27).mp4
3.常见问题解答
(1):干涉区可以建立多个
(2):开机时启用:无论程序是否处于自动任务 只要进入到干涉区都会自动触发绑定信号
运行时启用:干涉区程序运行时生效


























