
















CS机器人抱闸方式
1.简介
本篇文档介绍当前CS系列机器人的抱闸类型、查看当前抱闸类型及松开抱闸的方法
机器人当前抱闸类型分别为电磁式、插销式及有部分机器人抱闸方式为1-3轴电磁式,4-6轴为插销式过渡版本;设置不正确,1、会导致关节发热;2、时间久了会导致关节损坏;3、抱闸可能出现打不开的情况,或者碰撞的报警出现
1.1 插销式抱闸
电磁插销式抱闸相比电磁刹车片式抱闸有下列优点:1.轴向尺寸更紧凑;2. 电磁线圈发热量更小,散热效果也更好;3.成本更低。但是,电磁插销式抱闸也 有一个缺点就是抱闸定位效果不好,机器人掉电之后关节有一个(60度/减速 比)的活动范围;关机/急停后,会有稍许的下坠。
1.2 电磁式抱闸
电磁刹车片式抱闸优点相比插销式,在给机器人本体断电时不会有活动范围,相比的缺点除了轴向尺寸不够紧凑、电磁线圈发热量大、成本高之外,还会产生摩擦粉尘。如果不对产生粉尘的器件很好地包裹,那么会对光电编码器产生干扰
2.操作流程
2.1 抱闸类型查看和设置
a. 检查方法流程
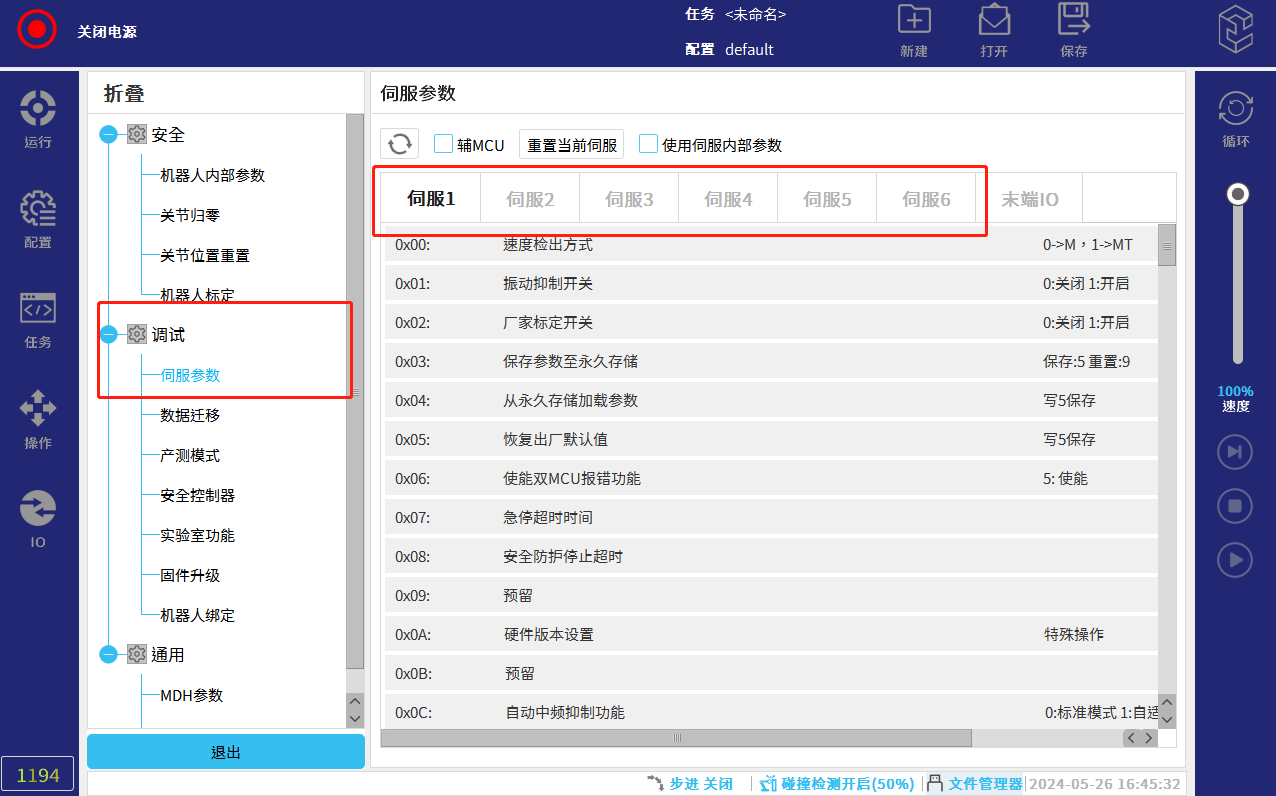
- 在正常模式下点击下图所示右上角红框1标注区域(连续快速点击 5-8 次)就会出现输入密码页面界,红框2点击输入密码:elibot,进入专家模式;

点击伺服-伺服参数,选择对应伺服,下拉查看0x74参数,
通过伺服版本号可以初步进行伺服版本判断,如果伺服固件版本 3 的个位是 4,则表示为电磁抱闸,为 8 则表示为弹杆抱闸,
为 0 则表示固件为通用版本,此时无法通过固件区分抱闸保本。
(比如截图中的 90,表示固件为通用版本,如果为 98,则表示为弹杆抱闸,如果为 94,则表示为电磁抱闸)


b. 当前类型查看及修改
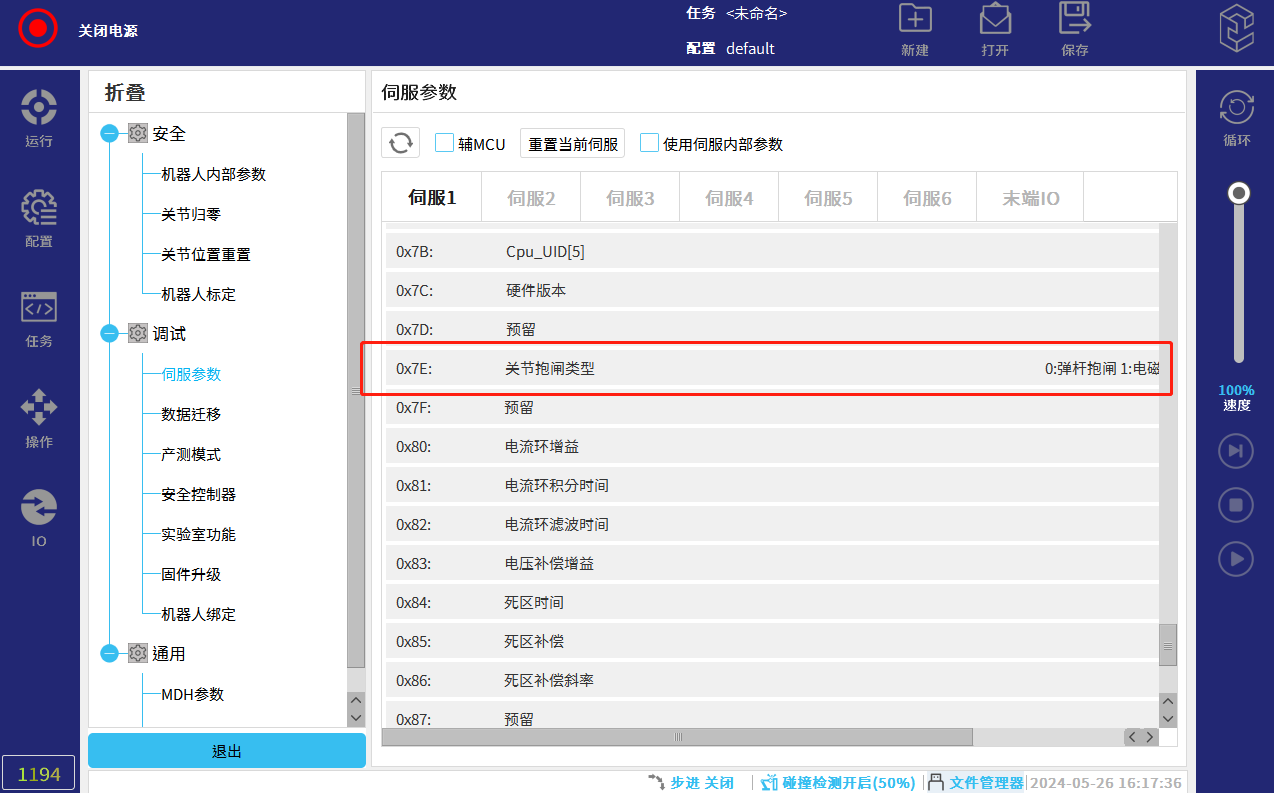
- 查看:在伺服参数界面下拉至0X7E位置,查看0X7E的值(0:弹杆抱闸,1:电磁抱闸)
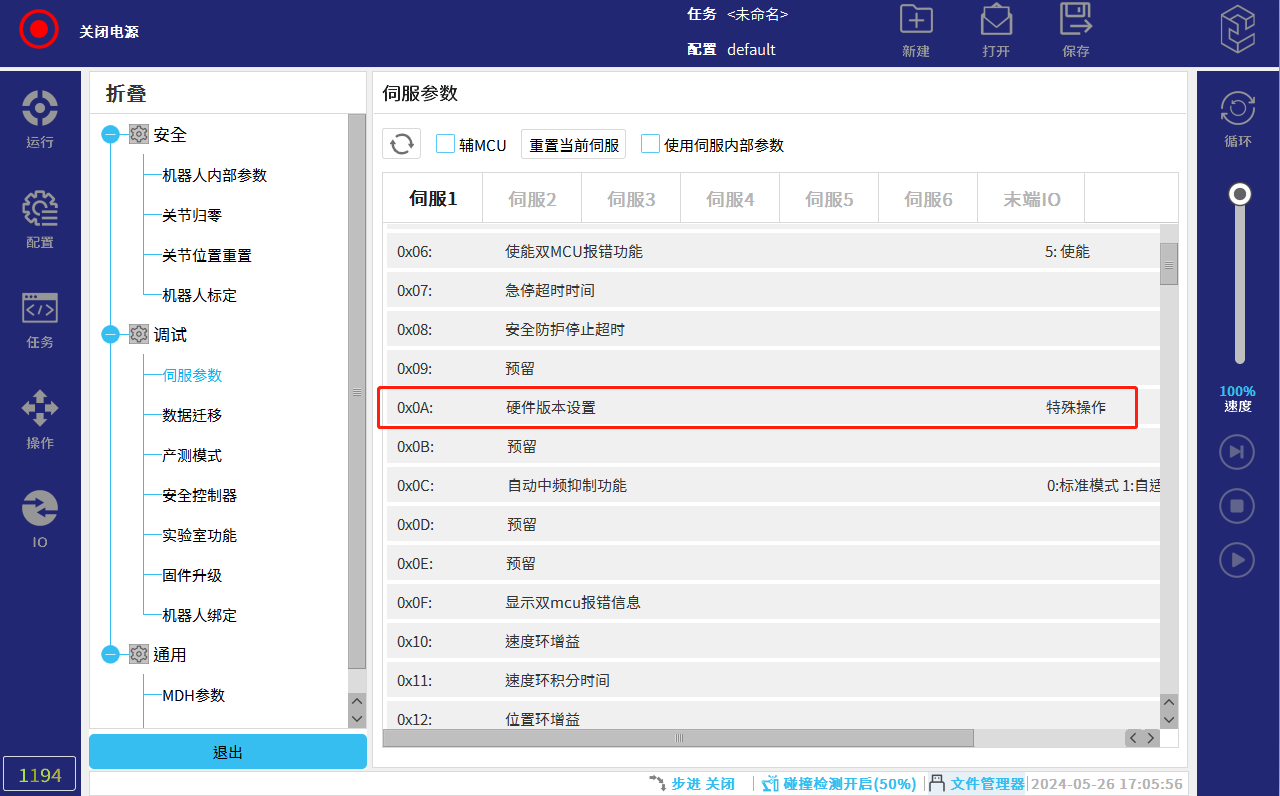
- 修改:参数界面回到上面,找到参数0x0A位置
- 先修改0x0A参数写入30000,(这个为关键字,避免误写入)
- 接着0x0A参数写入1,(抱闸类型为1-电磁抱闸)断电再上电后0x7E显示1
或者0x0A参数写入2,(抱闸类型为0-探杆抱闸)断电再上电后0x7E显示0
2.2 松开抱闸的常用方法
注意:操作松开抱闸时建议将机器人软件更新至2.10.1.14以上,此版本兼容各种抱闸类型操作
a. 电磁抱闸-机器人进入“反向驱动”
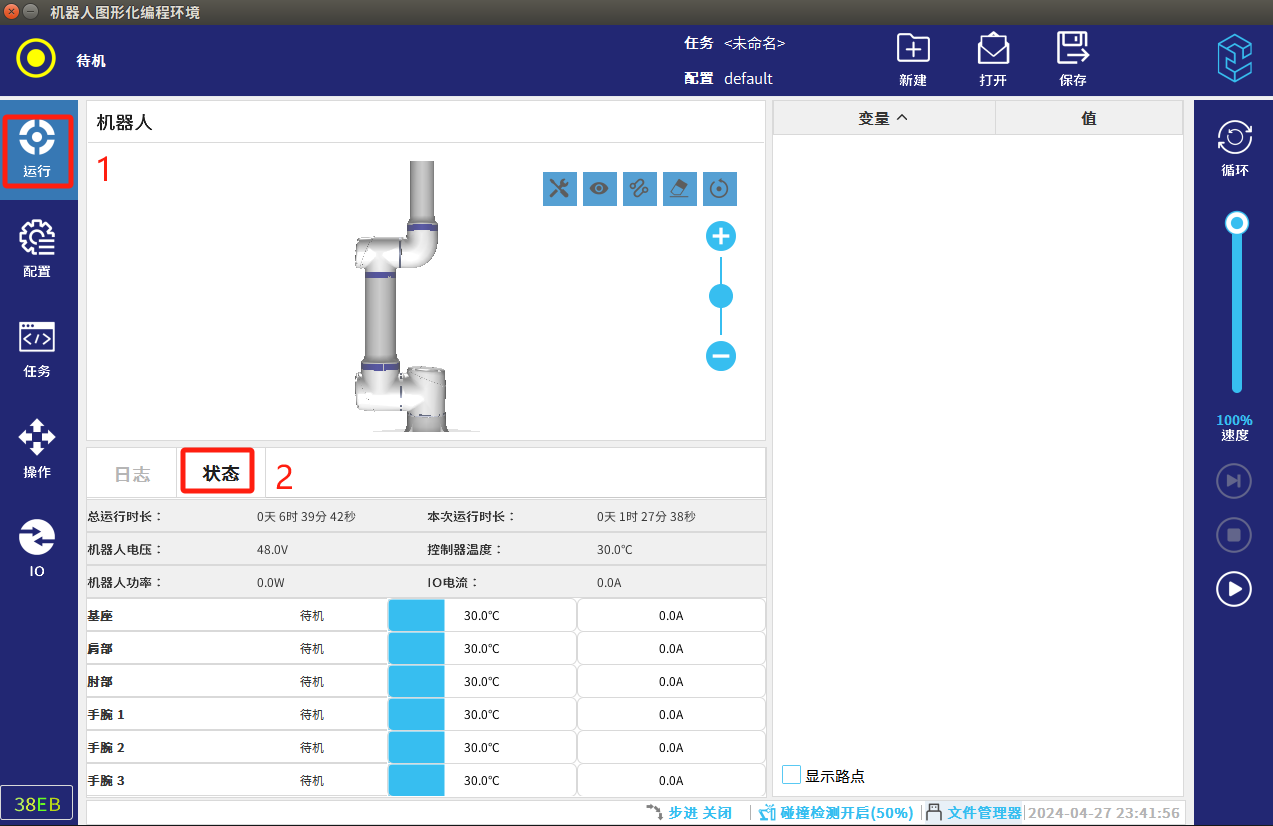
- 机器人进入下图界面,点击 “打开电源“

- 机器人显示”待机“状态后退出,进入运行页面,切换状态
按住示教器反面的拖动使能开关,机器人即进入 “反向驱动”模式。点击开启对应轴的”反向驱动“,
此时关节在重力的作用下会正常下滑,机器人可以直接使用手进行拖动。
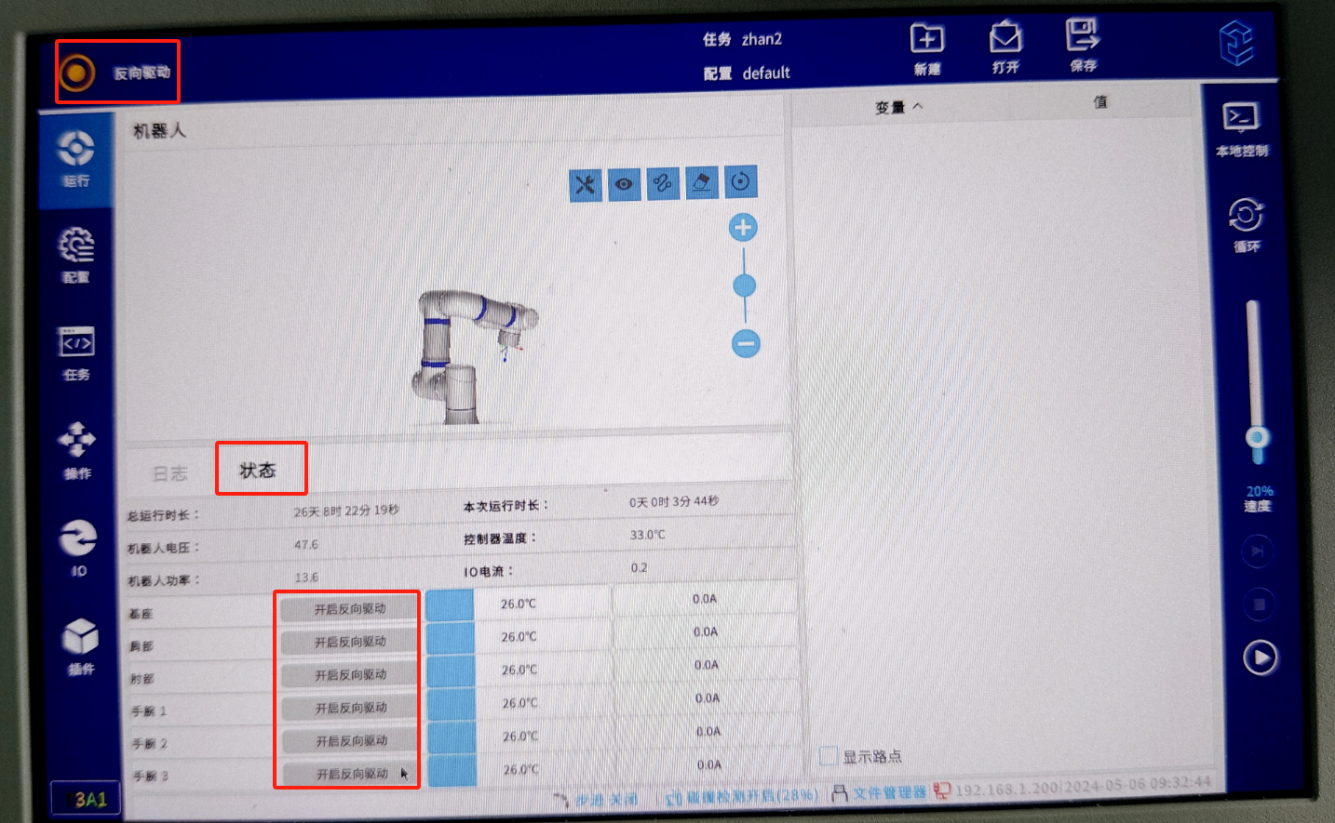
此时跟进现场情况单独开启一个轴或多个轴反向驱动,用手进行拖动将机器手移动到安全区域。
松开示教器反面的拖动使能开关,机器手电机抱闸,再松开机器人本体防止机器臂下滑导致二次伤害。
当机器人在安全区域内进入下图界面,点击 “释放抱闸“。等待页面左上角显示“正常模式”,机器人可正常使用。

b. 插销抱闸-机器人进入“反向驱动”
机器人进入下图界面,点击 “打开电源“
- 机器人显示”待机“状态后,按住示教器反面的拖动使能开关,机器人即进入 “反向驱动”模式。机器人可以直接使用手进行拖动,当受力达到一定程度后,伺服会自动松开抱闸,并被推动。
- 将机器人移动到安全区域内,然后点击 “释放抱闸“。等待页面左上角显示“正常模式”,机器人可正常使用。
3.常见问题解答
- 建议现场机器人的软件版本更新至2.10以上,因为后续版本带有减速机保护,能在发生碰撞时通过软轴最大程度保护关节;
- 机器人触发急停后,电磁式抱闸不会活动,插销式有小范围活动,因此也可以通过触发机器人急停来判断关节抱闸类型;
- 操作松开抱闸流程时,插销式抱闸关节只要受到一定的力会自动松开抱闸,无关是否有选择开启反向驱动;
- 伺服关节损坏报警异常后无法通过以上松开抱闸方法操作,需手动松开,具体参考CS服务手册操作指南
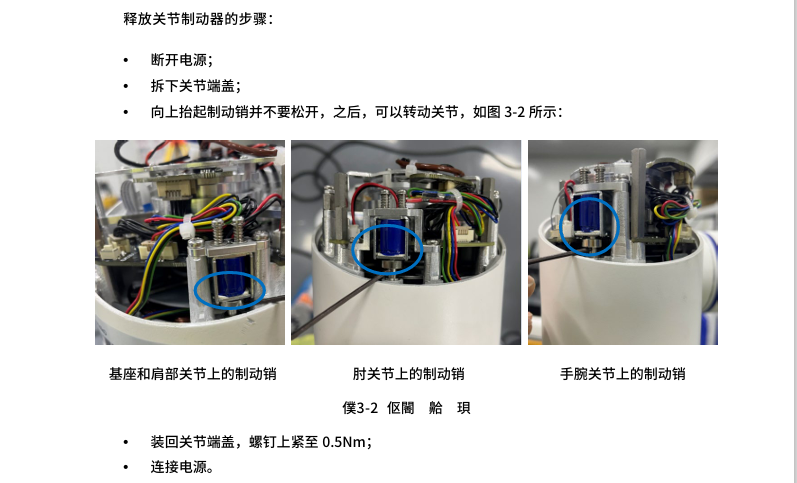
a. 插销类型抱闸
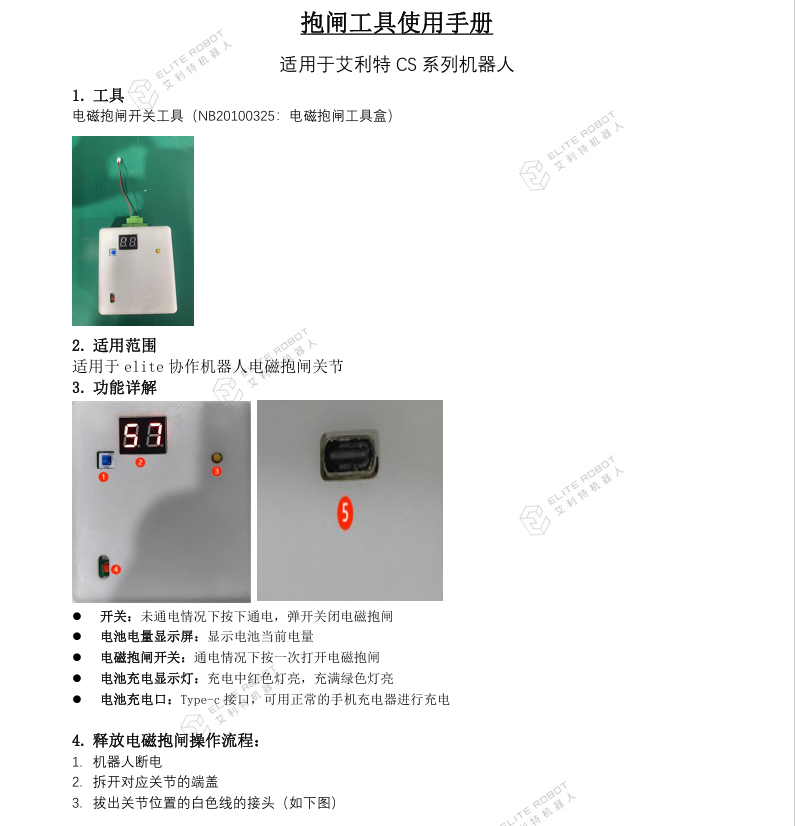
b. 电磁类型抱闸手动松开需要借助专业工具,可联系艾利特售后人员并提供操作指南


4.示例
5.附录
CS_服务手册_CS66_V2.11.0.pdf
抱闸工具使用手册.pdf
抱闸类型设置.pdf


























