CSH机器人基础使用
2025-05-27
1. 简介
本篇技术文档对CS520H最基础的开机使用,以及常见问题讲解
2. 操作流程
1、开机从打包位进入垂直位置,直接点击原点,就可以进入垂直姿态,不要直接按关节移动或者直线坐标系移动,由于520机器人有从动关节会出现机器人一直返回垂直姿态的情况

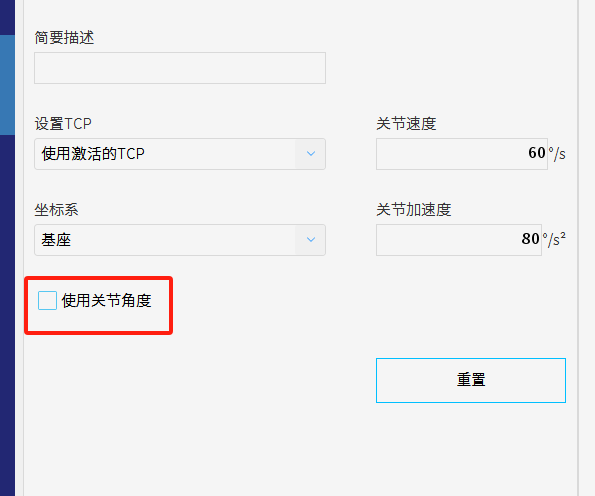
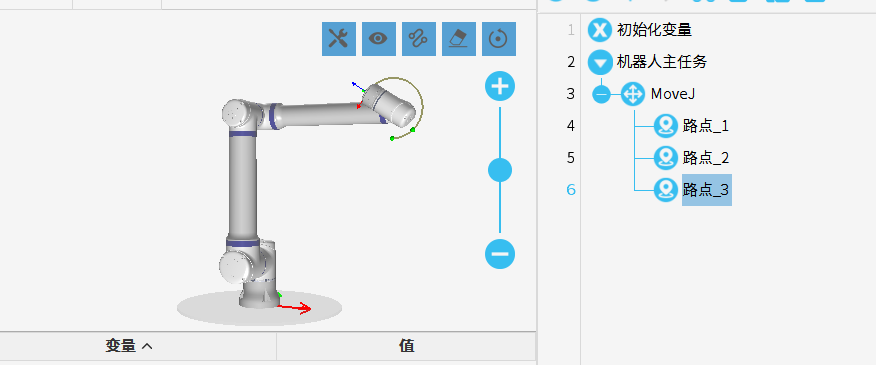
2、 在movej选择关节角度下可以在4关节并不水平进行执行程序,如下图
3、如需要单独移动手腕1,操作步骤
(1)点击关节位置手腕1参数处,进行修改

(2)进入机器人页面后点击关节位置手腕1,输入对应想移动的角度后,点击对号,长按自动移动就可以。

4、如出现手腕1,不平的情况可以尝试修改关节零点位置,步骤如下
首先确认是否水平,可以使用水平尺,或者激光水平仪来测量,如下图

垂直测量

水平测量
可以从上面两种方法确认那个方向准确那个方向偏移,通过下面方法进行修正。
(1)连续点击右上角空白处输入密码:elibot

(2)先点击手腕1处,移动至想要的角度后(方法参考问题2),找到关节归零,将手腕1选中后,点击归零关节。

达到下面结果进行完成效果,代表达到基本水平。


5、在2.13.1版本,H系列机器人做更新,可以进行朝上水平,如下图