
















EC机器人一键回原
2025-05-27
1、简介
一个项目中,如果有一个较好的回原逻辑,能够省下较多的启动时间,也能避免机构干涉问题。想要有个安全、有效的回原逻辑,需要我们对项目的工艺流程要足够了解。
2.操作流程
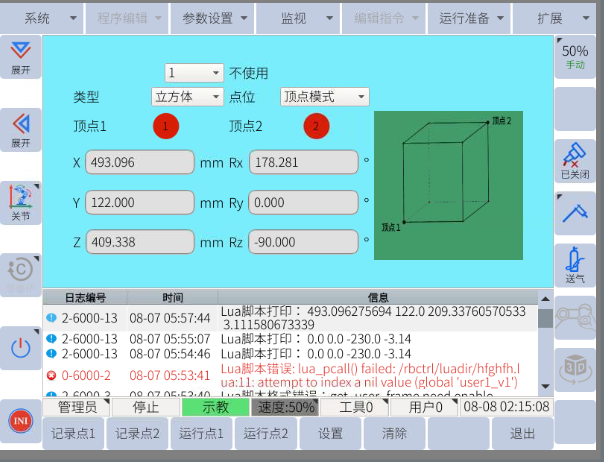
2.1利用干涉区功能回原:
以下图为例,将工作区域分为四个干涉区,以下图机器人位置为Home点,会在四个干涉区中进行产品的取放,最终作业结束后会回到Home点。
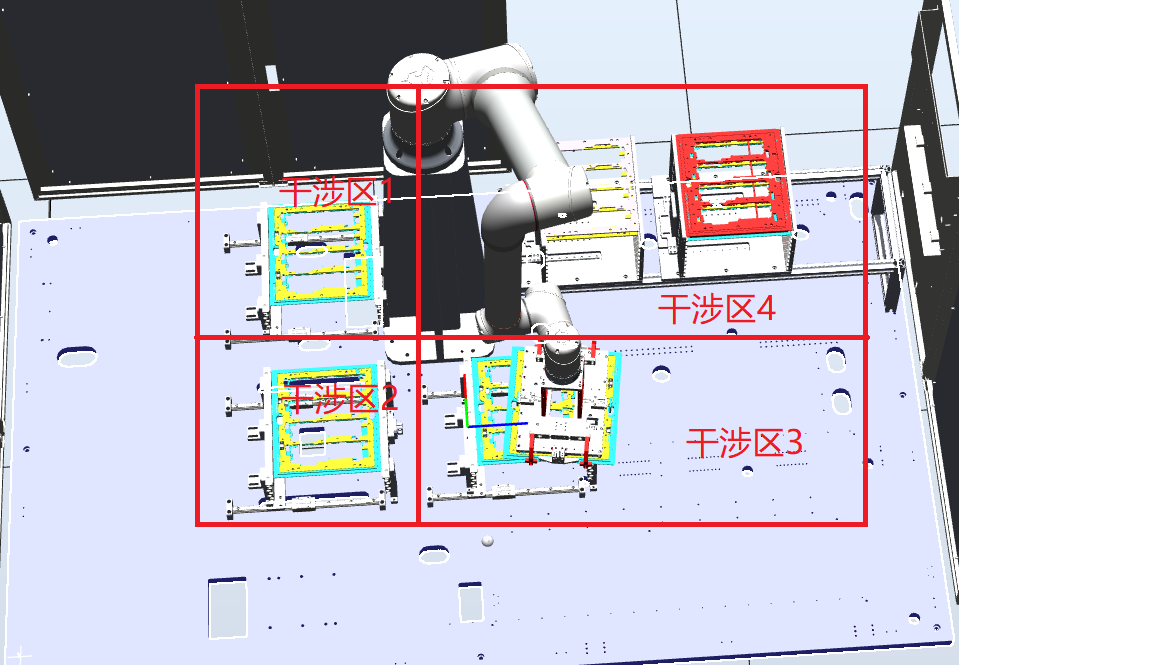
做一键回原,首先需要考虑机构干涉问题,以下就几种常见的工作环境,做简要说明。
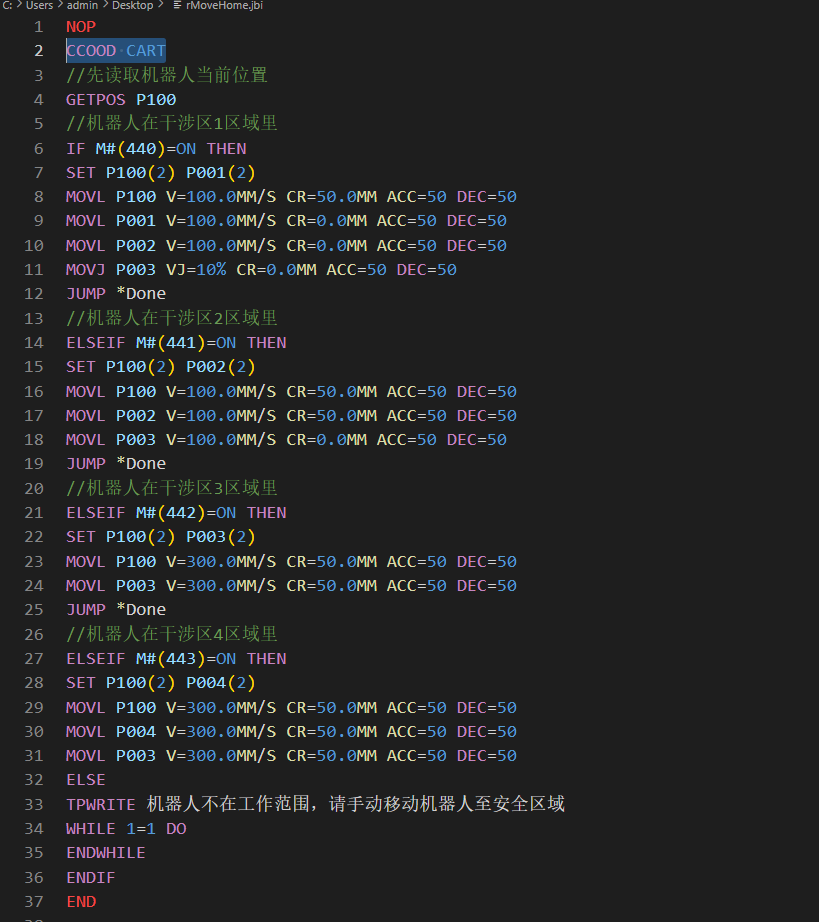
2.1.1 在干涉区内回原
以上图的项目环境为例,机器人在工作区里启动,可以从当前位置启动,可以直线上升无干涉风险。
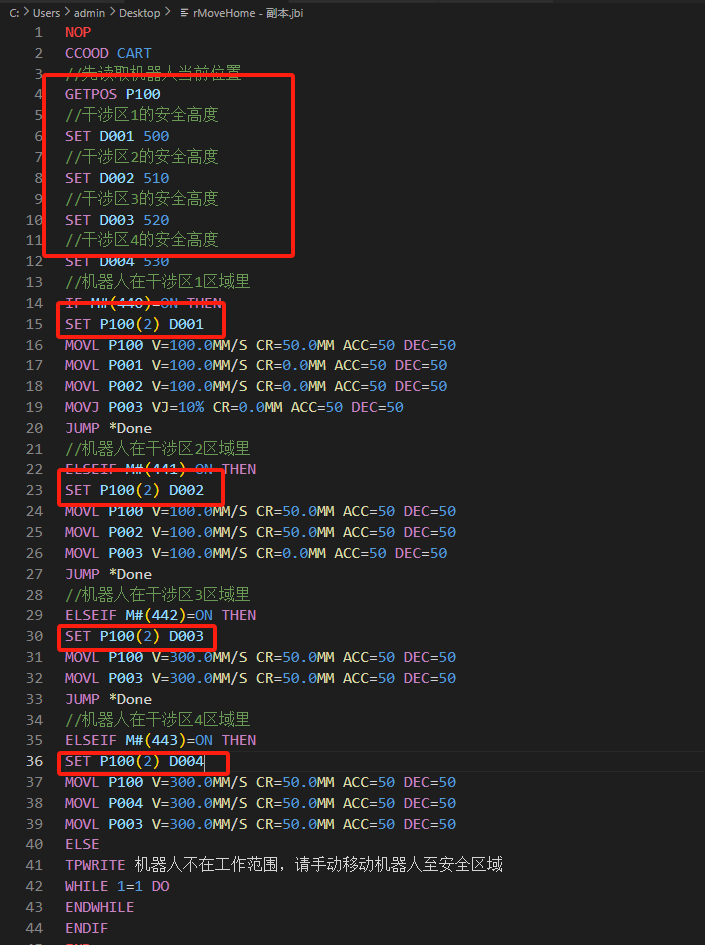
方式一:上升到各个区域上位安全位置高度,需要手动示教各个干涉区的上方安全位
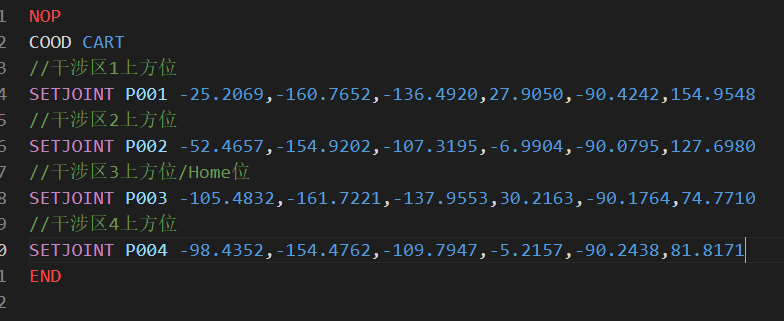
方式二:指定各个区域的安全高度,需要手动写程序赋值,或者由上位机控制,这里以手动程序赋值为例。
2.1.2 不在干涉区内回原
不在干涉区暂时无法规划路径,故不能依靠干涉区回原,若在运行过程中出现机器人停止在干涉区之外且在工作范围之内,需要重新规划相关干涉区
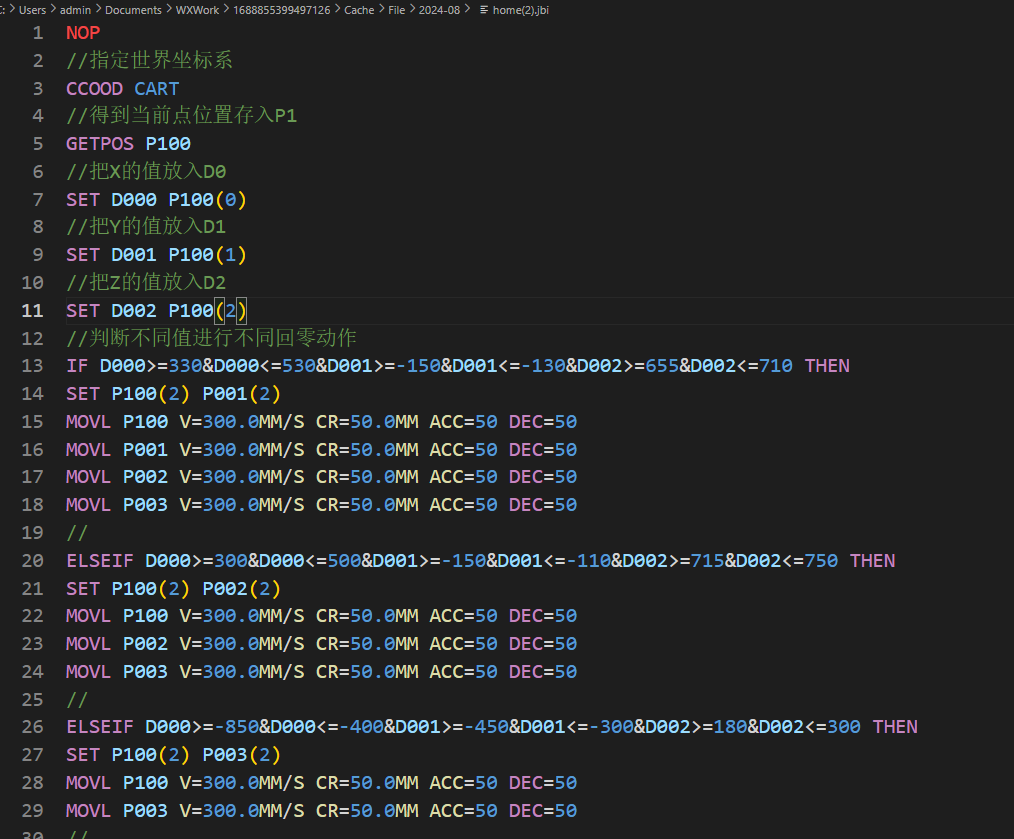
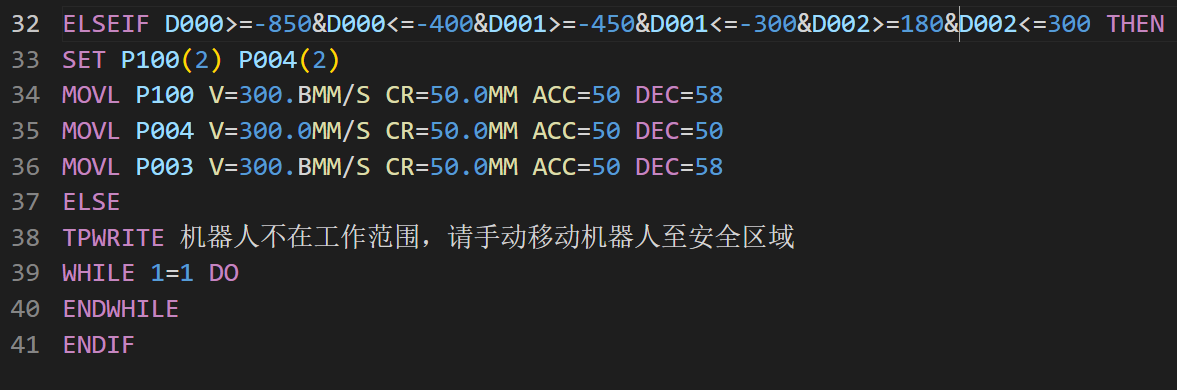
2.2.利用判断机器人的实时位置回原
根据实时位置赋值判断当前位置的空间范围,来实现回原目的
3.常见问题解答
本文举例以工具末端始终垂直于地面,现场作业过程中,机器人末端可能存在多种姿态,需要依照现场作业环境做出实时更改,切不可完全参照本文举例。比如现场机器人存在末端RX或RY较对齐姿态旋转了90°,上升时可能会存在末端干涉问题。


























