
















EC机器人MOV与MOVE两种基础运动指令区别
1.简介
EC系列机器人运动指令应用指南
在EC系列机器人编程中,MOV与MOVE作为两种基础运动指令形式,分别对应不同的应用场景:
一、指令特性对比
1. MOV指令
● 支持关节/线性/圆弧运动
● 参数设置简洁(默认融合半径、自动加减速)
● 优势:代码精简直观,适用于常规搬运、码垛等基础场景
● 建议:运动参数要求不苛刻时优先采用,便于程序维护与客户验收
2. MOVE指令(3.4版本新增)
● 提供完整运动参数接口(速度/加速度/融合半径可定制)
● 支持坐标系绑定功能(工具/用户坐标系动态关联)
● 优势:实现高精度轨迹控制与程序快速迁移
● 典型场景:多TCP协作、精密装配、跨设备程序移植
二、MOVE核心功能解析
1. 动态坐标系绑定
● 工具坐标系绑定:通过切换工具号实现不同TCP复现相同轨迹(适用场景:夹爪快速换型、多工具协同作业)
● 用户坐标系绑定:通过坐标系映射实现轨迹复用(适用场景:多工位码垛、产线扩展)
● 典型案例:EC63升级EC66时,保持原有轨迹逻辑,仅需更新坐标系参数即可适配新臂展
2. 程序快速移植
● 跨机型兼容:同系列机器人间程序迁移时,确保目标机型可达性前提下,通过坐标系重定义快速投产
● 产线扩展:新增加工设备时,通过坐标系调整快速生成对应作业程序
三、选型建议
● 优先使用MOV:标准化作业、参数敏感度低的场景
● 必须使用MOVE:需要精密运动控制、多坐标系管理或程序复用的场景
● 混合编程:常规动作用MOV保持简洁,关键工艺段用MOVE精确控制
四、 运动方式
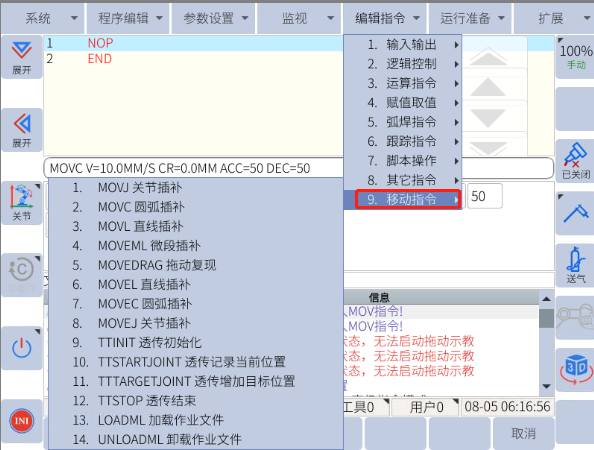
MOV:MOVJ、MOVL、MOVC
MOVE:MOVEJ、MOVEL、MOVEC
具体运动指令详解请见JBI手册
2.举例
某机器人作业车间中追加了一个需要上下料的数控装置,但这个装置的距离较远,因此该车间中的 EC63 机器人需要替换为臂展更长的 EC66。只要原本 EC63 中,关键部分的移动指令均为 MOVEL(或可以简单地修改为 MOVEL),用户就能省下示教原有程序的位置点所需要的大量时间,只需要调整绑定的用户坐标系参数并追加新数控装置所需的程序即可
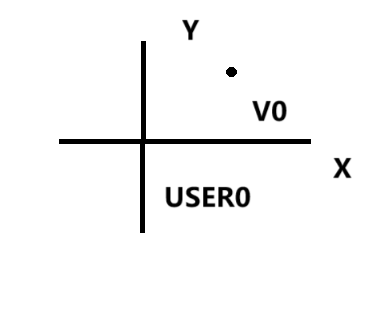
EC63 V0变量在用户坐标系USER0下的位置
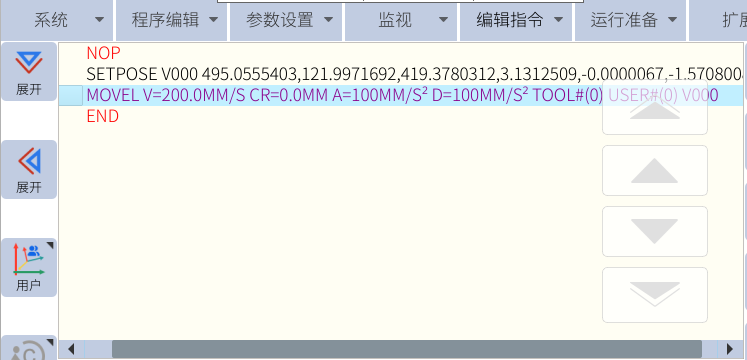
2.将EC63的备份恢复到EC66上,在EC66上不断调整用户坐标USER0的数据,就会得到V0在换机之前EC63下的同样位置


























